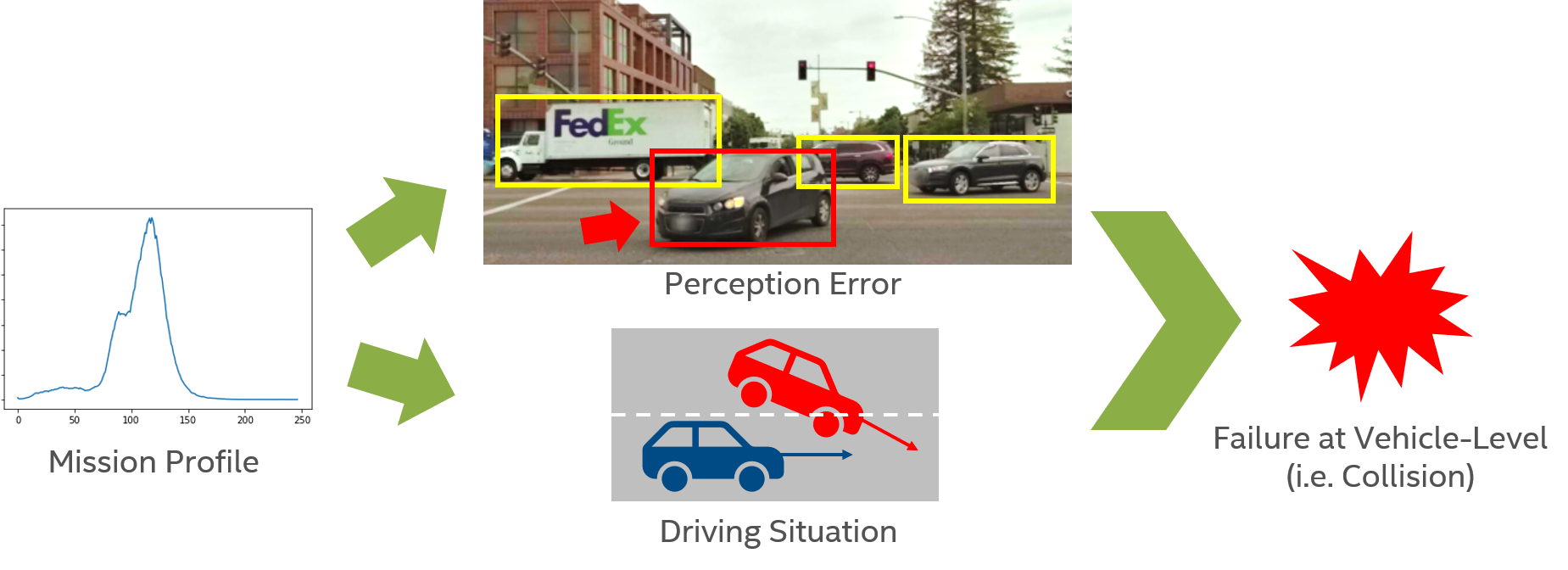
The development of Automated Vehicles (AVs) is progressing quickly and the first robotaxi services are being deployed worldwide. However, to receive authority certification for mass deployment, manufactures need to justify that their AVs operate safer than human drivers. This in turn creates the need to estimate and model the collision rate (failure rate) of an AV taking all possible errors and driving situations into account. In other words, there is the strong demand for comprehensive Mean Time Between Failure (MTBF) models for AVs. In this paper, we will introduce such a generic and scalable model that creates a link between errors in the perception system to vehicle-level failures (collisions). Using this model, we are able to derive requirements for the perception quality based on the desired vehicle-level MTBF or vice versa to obtain an MTBF value given a certain mission profile and perception quality.
翻译:自动飞行器(AV)的研制工作进展迅速,全世界正在部署第一批机器人化服务,然而,为了获得大规模部署的授权证书,制造厂商需要证明其AV操作比人驾驶员更安全的理由,从而需要考虑到所有可能的错误和驾驶情况,估计和模拟AV的碰撞率(失灵率),换句话说,对AV的全面的失败之间平均时间(MTBF)模型的需求很大。在本文件中,我们将采用这样一种通用和可扩缩的模式,将感知系统中的错误与车辆级故障(collisions)联系起来。利用这一模式,我们可以根据理想的车辆级MTBF或反之,根据预期的车辆级MTBF或反之,获得MTBF值的要求,以某种任务概况和感知质量获得MTBF的价值。