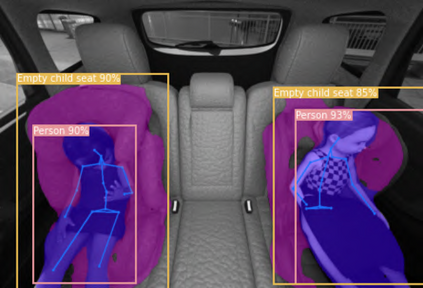
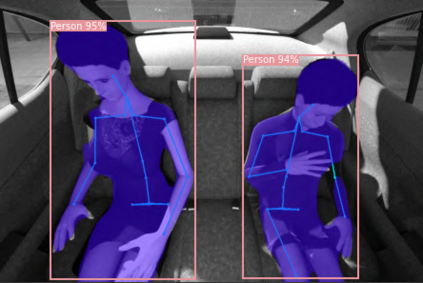
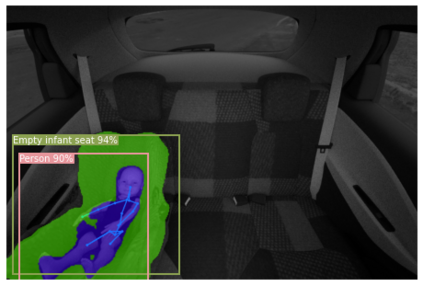
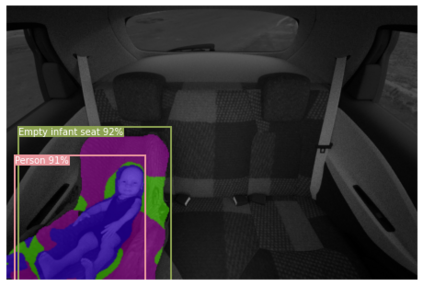
In order to ensure safe autonomous driving, precise information about the conditions in and around the vehicle must be available. Accordingly, the monitoring of occupants and objects inside the vehicle is crucial. In the state-of-the-art, single or multiple deep neural networks are used for either object recognition, semantic segmentation, or human pose estimation. In contrast, we propose our Multitask Detection, Segmentation and Pose Estimation Network (MDSP) -- the first multitask network solving all these three tasks jointly in the area of occupancy monitoring. Due to the shared architecture, memory and computing costs can be saved while achieving higher accuracy. Furthermore, our architecture allows a flexible combination of the three mentioned tasks during a simple end-to-end training. We perform comprehensive evaluations on the public datasets SVIRO and TiCaM in order to demonstrate the superior performance.
翻译:为了确保安全自主驾驶,必须提供关于车辆内和周围条件的准确信息,因此,对车辆内居住者和物体的监测至关重要。在最先进的设备中,单层或多层深神经网络用于物体识别、语义分解或人体构成估计。相反,我们建议多任务探测、分块和波斯估计网络(MDSP) -- -- 第一个多任务网络,在占用监测领域共同解决所有这三项任务。由于共用结构、记忆和计算成本可以节省,同时实现更高的准确性。此外,我们的建筑允许在简单端到端培训中灵活地结合上述三项任务。我们对公共数据集SVIRO和TiCaM进行全面评估,以展示优异性表现。