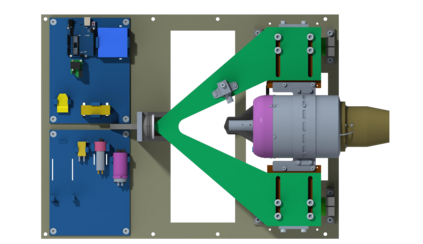
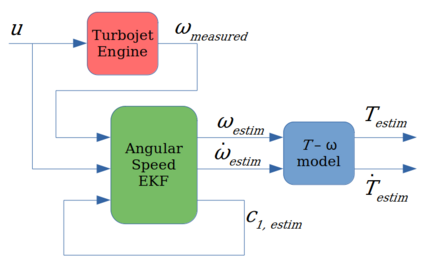
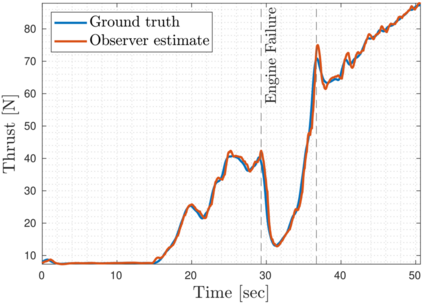
Jet-powered vertical takeoff and landing (VTOL) drones require precise thrust estimation to ensure adequate stability margins and robust maneuvering. Small-scale turbojets have become good candidates for powering heavy aerial drones. However, due to limited instrumentation available in these turbojets, estimating the precise thrust using classical techniques is not straightforward. In this paper, we present a methodology to accurately estimate the online thrust for the small-scale turbojets used on the iRonCub - an aerial humanoid robot. We use a grey-box method to capture the turbojet system dynamics with a nonlinear state-space model based on the data acquired from a custom engine test bench. This model is then used to design an extended Kalman filter that estimates the turbojet thrust only from the angular speed measurements. We exploited the parameter estimation algorithm to ensure that the EKF gives smooth and accurate estimates even at engine failures. The designed EKF was validated on the test bench where the mean absolute error in estimated thrust was found to be within 2% of rated peak thrust.
翻译:喷气式垂直起飞和着陆(VTOL)无人机需要精确的推力估计,以确保足够的稳定性幅度和稳健的机动性。小型涡轮吉特机已成为为重型空中无人机提供动力的良好选择。然而,由于这些涡轮吉特机中可用的仪器有限,使用古典技术估计精确的推力并不简单。在本文中,我们提出了一个精确估计iRonCub上小型涡轮吉特机(iRonCub)的在线推力的方法。我们使用灰箱方法,根据从定制发动机试验台获得的数据,用非线性状态空间模型来捕捉涡轮喷气系统动态。然后,该模型用于设计一个延长的卡尔曼过滤器,该过滤器只能从角速度测量中估计涡轮吉特的推力。我们使用了参数估计算法,以确保即使在引擎故障时,EKF也给出平稳和准确的估算值。我们设计的EKF在试验台上验证了测试台,在那里估计的绝对误差是定的峰推力的2%。