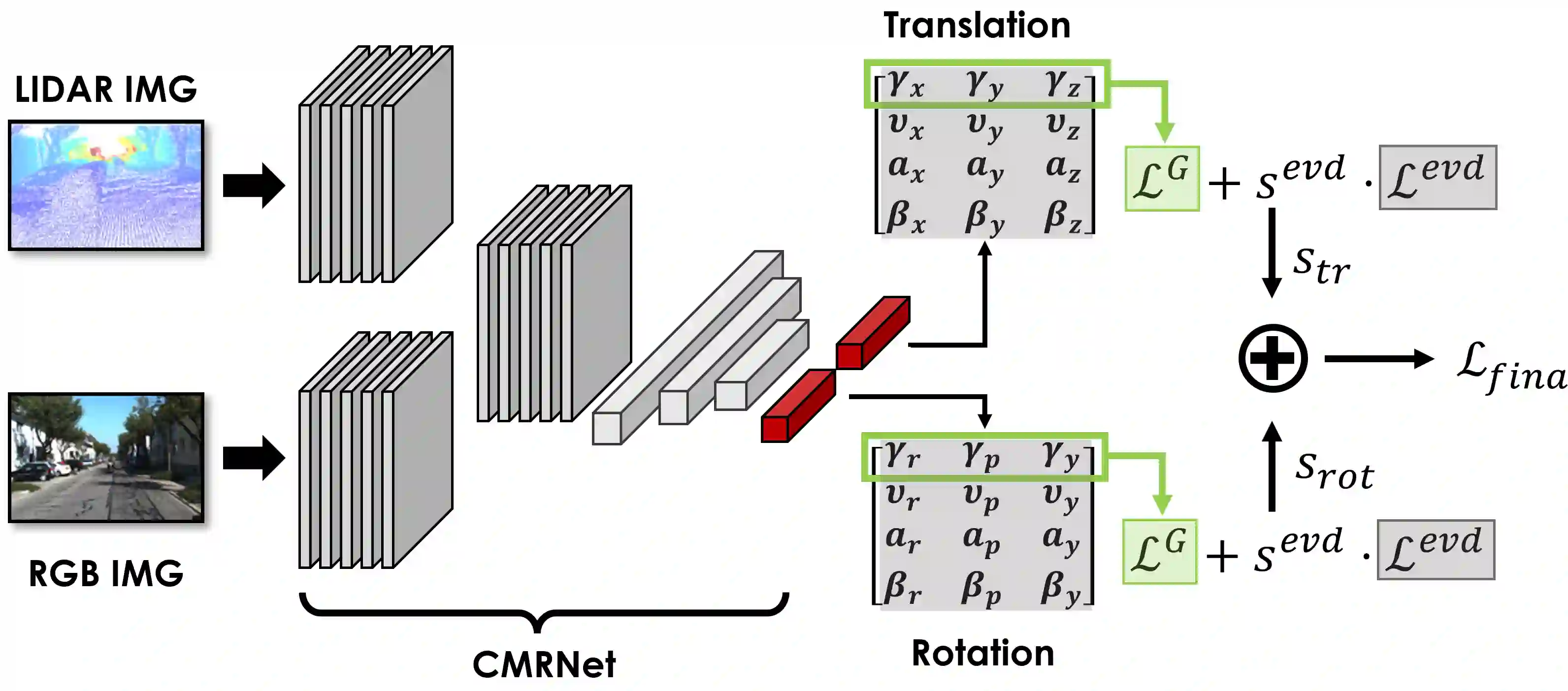
Camera localization, i.e., camera pose regression, represents a very important task in computer vision, since it has many practical applications, such as autonomous driving. A reliable estimation of the uncertainties in camera localization is also important, as it would allow to intercept localization failures, which would be dangerous. Even though the literature presents some uncertainty estimation methods, to the best of our knowledge their effectiveness has not been thoroughly examined. This work compares the performances of three consolidated epistemic uncertainty estimation methods: Monte Carlo Dropout (MCD), Deep Ensemble (DE), and Deep Evidential Regression (DER), in the specific context of camera localization. We exploited CMRNet, a DNN approach for multi-modal image to LiDAR map registration, by modifying its internal configuration to allow for an extensive experimental activity with the three methods on the KITTI dataset. Particularly significant has been the application of DER. We achieve accurate camera localization and a calibrated uncertainty, to the point that some method can be used for detecting localization failures.
翻译:相机本地化(即相机回归)是计算机视觉中一项非常重要的任务,因为它有许多实际应用,例如自动驾驶。可靠地估计相机本地化的不确定性也很重要,因为它将允许拦截本地化失败,而这将是危险的。即使文献提供了某些不确定性的估算方法,但据我们所知,它们的效力还没有得到彻底审查。这项工作比较了三种综合的缩略图不确定性估算方法的性能:蒙特卡洛漏流(MCD)、深层合成(DE)和深显性回归(DER),在相机本地化的具体背景下。我们利用了CMRNet,即多式图像对LIDAR地图注册的DNN方法,通过修改内部配置,允许使用KITTI数据集的三种方法开展广泛的实验活动。特别重要的是DER的应用。我们实现了精确的相机本地化和校准的不确定性,以至于可以使用某种方法来探测本地化失败。