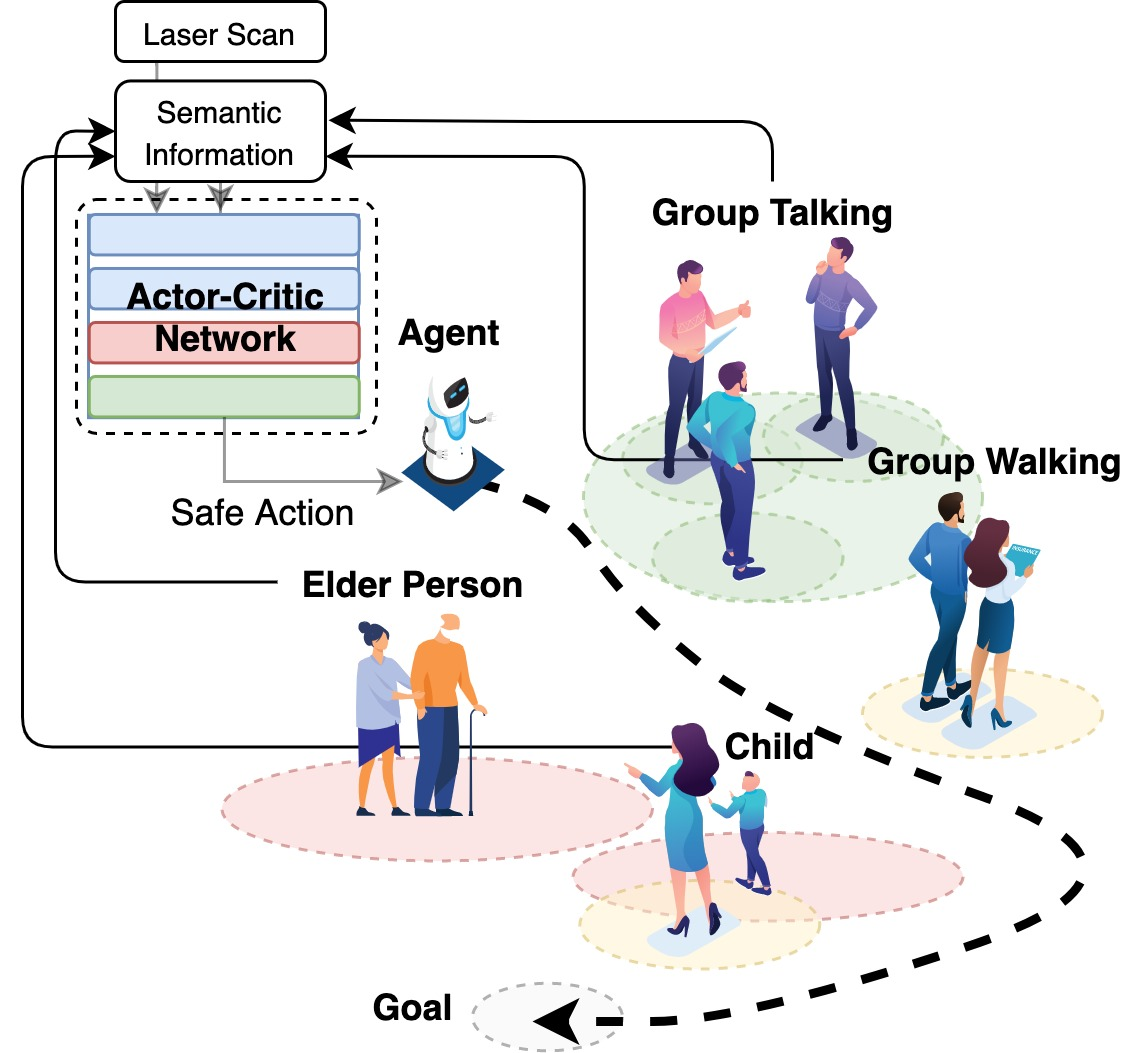
Intelligent navigation among social crowds is an essential aspect of mobile robotics for applications such as delivery, health care, or assistance. Deep Reinforcement Learning emerged as an alternative planning method to conservative approaches and promises more efficient and flexible navigation. However, in highly dynamic environments employing different kinds of obstacle classes, safe navigation still presents a grand challenge. In this paper, we propose a semantic Deep-reinforcement-learning-based navigation approach that teaches object-specific safety rules by considering high-level obstacle information. In particular, the agent learns object-specific behavior by contemplating the specific danger zones to enhance safety around vulnerable object classes. We tested the approach against a benchmark obstacle avoidance approach and found an increase in safety. Furthermore, we demonstrate that the agent could learn to navigate more safely by keeping an individual safety distance dependent on the semantic information.
翻译:社会人群之间的智能导航是移动机器人应用如交付、保健或援助的一个基本方面。深强化学习是保守做法的一种替代规划方法,并有望提高效率和灵活性。然而,在使用不同障碍等级的高度动态环境中,安全导航仍是一个重大挑战。在本文件中,我们提出一个语义式的深层强化学习导航方法,通过考虑高层次障碍信息来教授特定物体的安全规则。特别是,代理人通过思考特定危险区来加强脆弱物体类别周围的安全来学习特定物体的行为。我们测试了避免基准障碍的方法,发现安全性有所提高。此外,我们证明该代理人可以通过保持个人安全距离,依靠语义信息,学会更安全地航行。