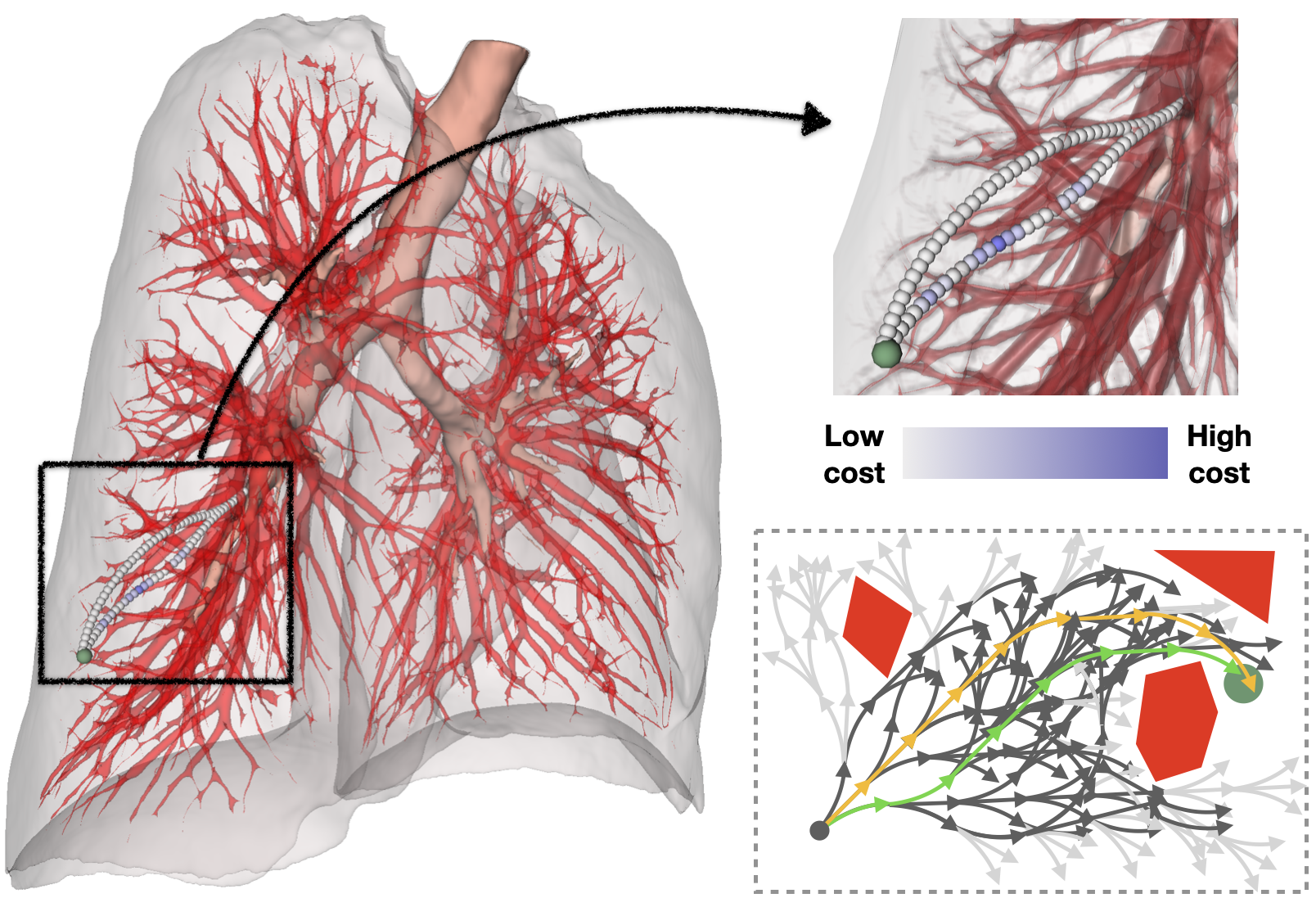
Medical steerable needles can follow 3D curvilinear trajectories inside body tissue, enabling them to move around critical anatomical structures and precisely reach clinically significant targets in a minimally invasive way. Automating needle steering, with motion planning as a key component, has the potential to maximize the accuracy, precision, speed, and safety of steerable needle procedures. In this paper, we introduce the first resolution-optimal motion planner for steerable needles that offers excellent practical performance in terms of runtime while simultaneously providing strong theoretical guarantees on completeness and the global optimality of the motion plan in finite time. Compared to state-of-the-art steerable needle motion planners, simulation experiments on realistic scenarios of lung biopsy demonstrate that our proposed planner is faster in generating higher-quality plans while incorporating clinically relevant cost functions. This indicates that the theoretical guarantees of the proposed planner have a practical impact on the motion plan quality, which is valuable for computing motion plans that minimize patient trauma.
翻译:医学上可控针针可以在身体组织内跟踪3D卷旋曲轨迹,使其能够在关键的解剖结构周围移动,以极小的侵入性方式精确地达到临床上的重要目标; 以运动规划为关键组成部分的自动针头方向有可能最大限度地提高可控针管程序的准确性、精确性、速度和安全性; 在本文中, 我们为可控针头引入了第一个分辨率最佳运动规划仪, 该仪针在运行时间方面提供出色的实用性能,同时在理论上对运动计划的完整性和全球在有限时间内的最佳性提供强有力的保障; 与最先进的可控针头运动规划者相比, 肺部活性检查现实情景的模拟实验表明,我们拟议的规划员在纳入临床相关成本功能的同时,更快地生成了更高质量的计划。 这说明,拟议规划员的理论保障对运动计划的质量具有实际影响,这对于计算尽量减少患者创伤的动作计划很有价值。