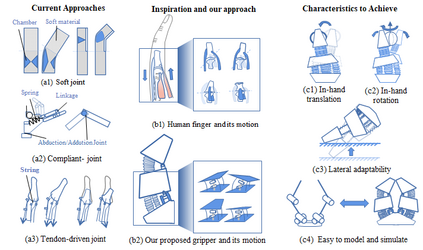
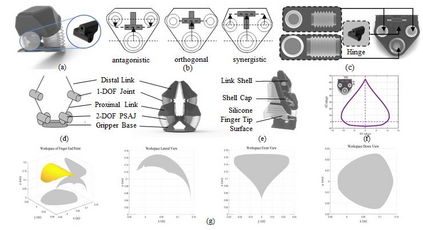
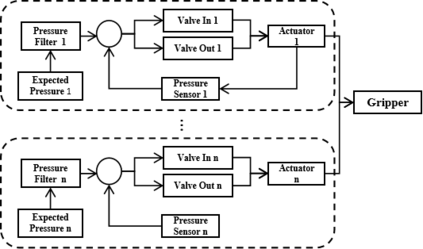
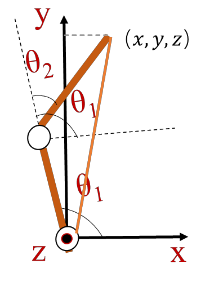
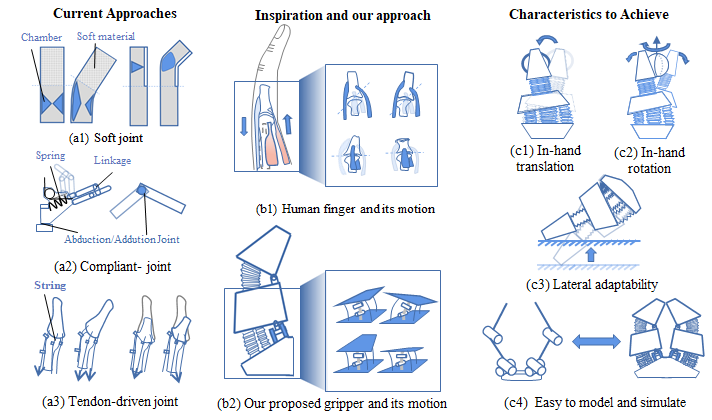
Soft grippers are receiving growing attention due to their compliance-based interactive safety and dexterity. Hybrid gripper (soft actuators enhanced by rigid constraints) is a new trend in soft gripper design. With right structural components actuated by soft actuators, they could achieve excellent grasping adaptability and payload, while also being easy to model and control with conventional kinematics. However, existing works were mostly focused on achieving superior payload and perception with simple planar workspaces, resulting in far less dexterity compared with conventional grippers. In this work, we took inspiration from the human Metacarpophalangeal (MCP) joint and proposed a new hybrid gripper design with 8 independent muscles. It was shown that adding the MCP complexity was critical in enabling a range of novel features in the hybrid gripper, including in-hand manipulation, lateral passive compliance, as well as new control modes. A prototype gripper was fabricated and tested on our proprietary dual-arm robot platform with vision guided grasping. With very lightweight pneumatic bellows soft actuators, the gripper could grasp objects over 25 times its own weight with lateral compliance. Using the dual-arm platform, highly anthropomorphic dexterous manipulations were demonstrated using two hybrid grippers, from Tug-of-war on a rigid rod, to passing a soft towel between two grippers using in-hand manipulation. Matching with the novel features and performance specifications of the proposed hybrid gripper, the underlying modeling, actuation, control, and experimental validation details were also presented, offering a promising approach to achieving enhanced dexterity, strength, and compliance in robotic grippers.
翻译:软伸缩器因其基于合规的交互式安全性和灵敏度而日益受到越来越多的关注。 混合拉动器(软动动画器因僵硬限制而增强)是软握手设计的新趋势。 由软动动画器驱动的正确的结构构件可以实现极佳的掌握适应性和有效载荷,同时也容易与传统运动动力学进行模拟和控制。 但是,现有的工程主要侧重于在简单的平板工作空间中实现高级有效载荷和感知,导致与常规握手相比,软软握手要少得多。 在这项工作中,我们从人类的Metcarpophalangeal(MCP)联合中获得了灵感,并提出了一个新的具有8个独立肌肉的新的混合握握手器设计。 事实证明,在混合拉动器中,包括手动操纵、侧被动的合规,以及新的控制模式。 原型牵动器在我们的自制型双臂机械式双臂机械平台上制作并测试了软握手握手势。 与较轻的软操作器操作器联合, 握手握手握手握手法在25次的螺旋操纵中,两部操纵中, 伸动的操作可以使双压的操作操作, 制式操纵在高压操作中实现。