【泡泡一分钟】一种利用点云数据建模城市场景的方法(ICCV2017-403)
每天一分钟,带你读遍机器人顶级会议文章
标题:Modeling Urban Scenes From Pointclouds William
作者:William Nguatem, Helmut Mayer
来源:International Conference on Computer Vision (ICCV 2017)
编译:陈世浪
审核:颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

在本文中,作者提出了一种从点云数据中建模城市场景的MUSP算法。同现有的方法相比,该方法不做曼哈顿世界假设、使用多面体建模和使用NURBS拟合非平地面,MUSP算法鲁棒性高、可拓展性强并且提供了更完整的描述。
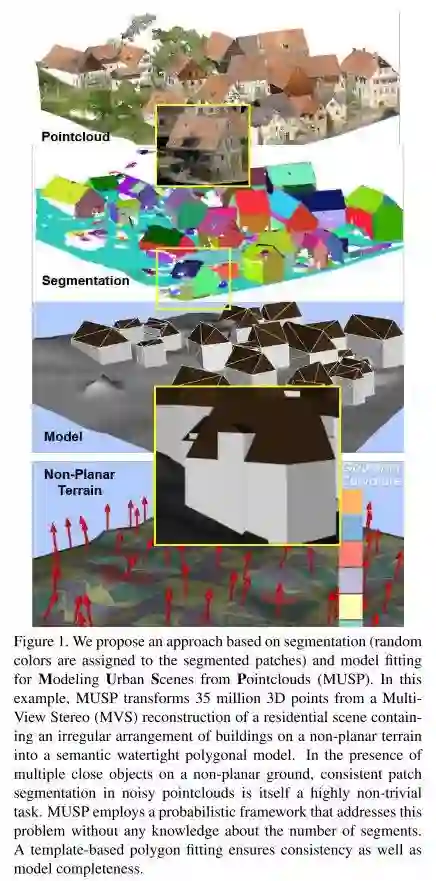
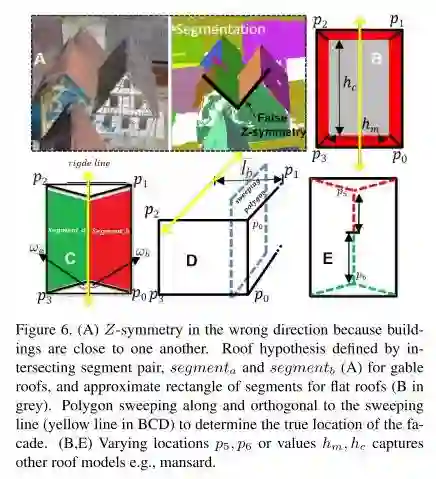
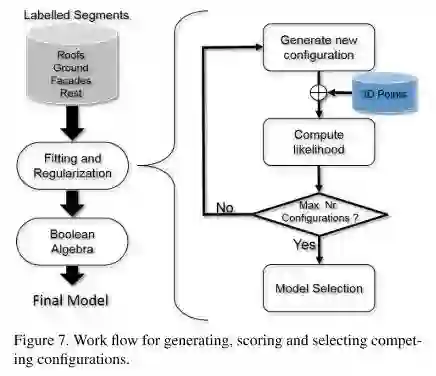
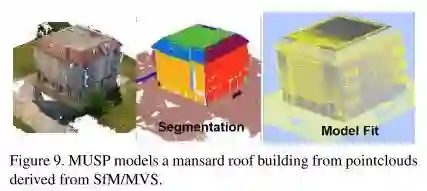
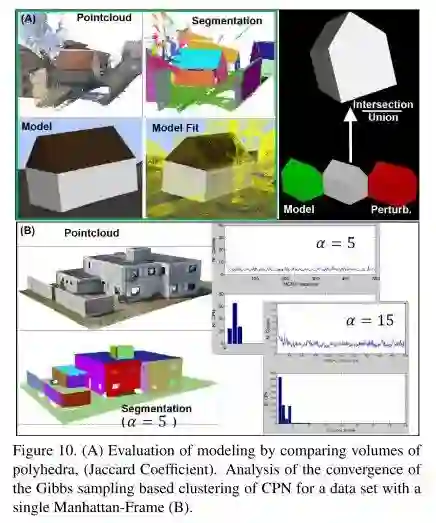
首先,作者在无参贝叶斯框架内使用分治算法将场景分割成一致的小块。这些小块通常是有意义的结构,如地面、墙面、屋顶或者屋顶上部结构。作者使用多边形扫描来拟合建筑物和地面的预定义模板,拟合出的NURBS表面应该均匀向前在其中。最后,作者将布尔运算应用到建筑物的多边形、建筑物零件和镶嵌的地面上,以裁剪不必要的几何形状(例如,不平地面的凸出物),从而得到最终的模型。
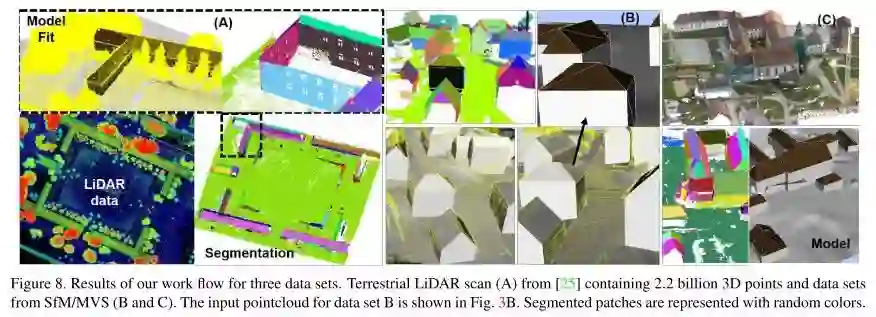
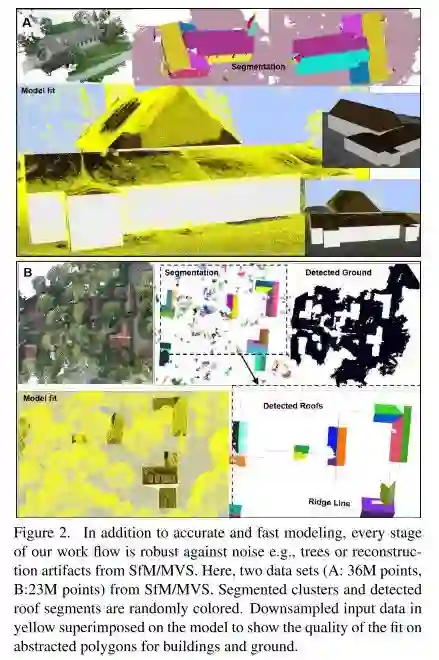
场景分割的显式贝叶斯公式使作者的方法适用于具有不同噪声、异常和点密度的数据集。作者从图像匹配和激光雷达两方面论证了MISP在3D点云上的鲁棒性。

Abstract
We present a method for Modeling Urban Scenes from Pointclouds (MUSP). In contrast to existing approaches, MUSP is robust, scalable and provides a more complete description by not making a Manhattan-World assumption and modeling both buildings (with polyhedra) as well as the non-planar ground (using NURBS).
First, we segment the scene into consistent patches using a divide-and-conquer based algorithm within a nonparametric Bayesian frame- work (stick-breaking construction). These patches often correspond to meaningful structures, such as the ground, facades, roofs and roof superstructures. We use polygon sweeping to fit predefined templates for buildings, and for the ground, a NURBS surface is fit and uniformly tessellated. Finally, we apply boolean operations to the polygons for buildings, buildings parts and the tesselated ground to clip unnecessary geometry (e.g., facades protrusions below the non-planar ground), leading to the final model.
The explicit Bayesian formulation ofscene segmentation makes our approach suitable for challenging datasets with varying amounts of noise, outliers, and point density. We demon- strate the robustness ofMUSP on 3D pointclouds from im- age matching as well as LiDAR.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




