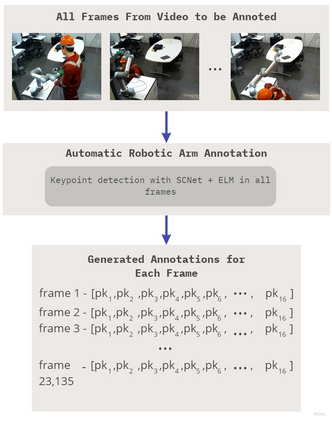
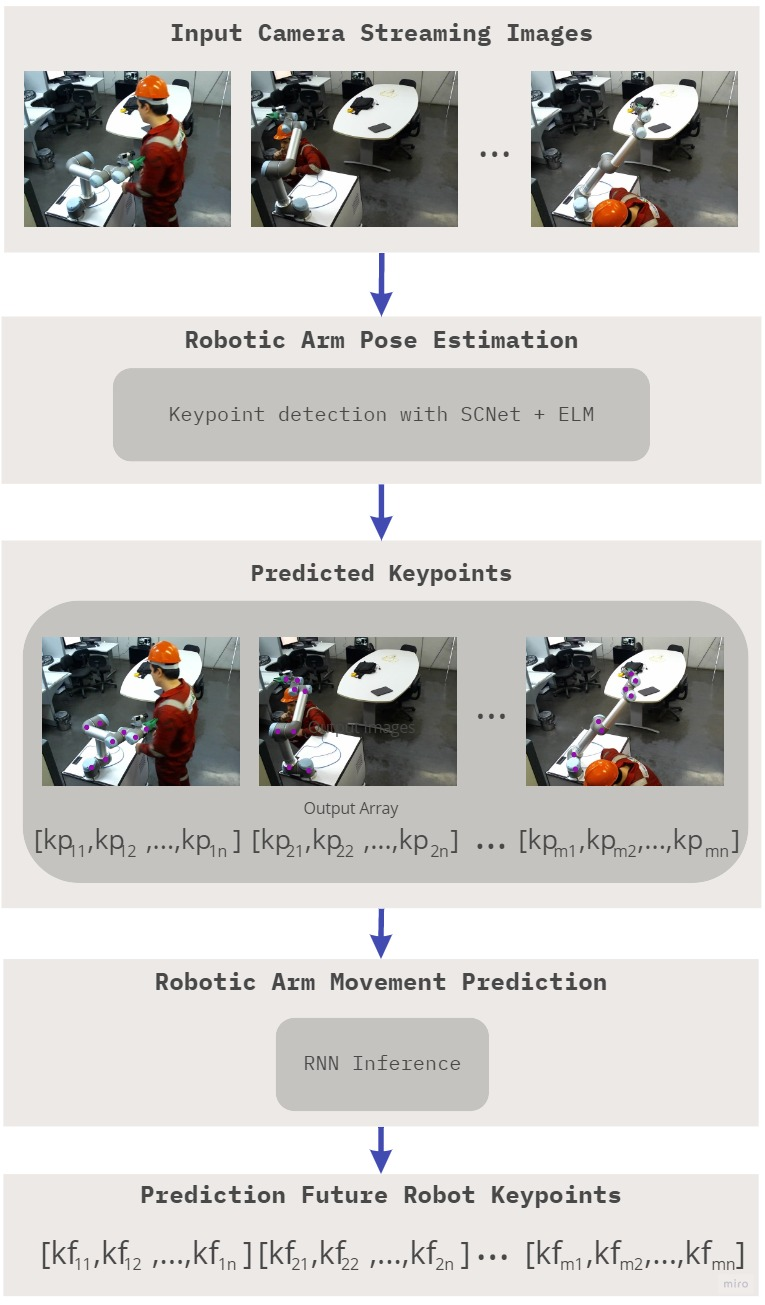
Human-robot collaboration has gained a notable prominence in Industry 4.0, as the use of collaborative robots increases efficiency and productivity in the automation process. However, it is necessary to consider the use of mechanisms that increase security in these environments, as the literature reports that risk situations may exist in the context of human-robot collaboration. One of the strategies that can be adopted is the visual recognition of the collaboration environment using machine learning techniques, which can automatically identify what is happening in the scene and what may happen in the future. In this work, we are proposing a new framework that is capable of detecting robotic arm keypoints commonly used in Industry 4.0. In addition to detecting, the proposed framework is able to predict the future movement of these robotic arms, thus providing relevant information that can be considered in the recognition of the human-robot collaboration scenario. The proposed framework is based on deep and extreme learning machine techniques. Results show that the proposed framework is capable of detecting and predicting with low error, contributing to the mitigation of risks in human-robot collaboration.
翻译:在工业4.0中,由于使用合作机器人提高了自动化过程中的效率和生产力,人类机器人合作在工业4.0中已获得显著的突出地位,然而,有必要考虑使用提高这些环境中安全性的机制,因为文献报告说,在人类机器人合作方面可能存在危险情况。可以采用的战略之一是,利用机器学习技术对合作环境进行直观认识,这种技术可以自动确定现场正在发生的情况和今后可能发生的情况。在这项工作中,我们提出了一个新的框架,能够探测工业4.0中常用的机器人手臂关键点。除了探测之外,拟议的框架能够预测这些机器人武器的未来移动情况,从而提供相关信息,在承认人类机器人合作设想时可以加以考虑。拟议的框架以深层次和极端的学习机器技术为基础。结果显示,拟议的框架能够以低误探测和预测现场发生的情况,有助于减轻人类机器人合作中的风险。