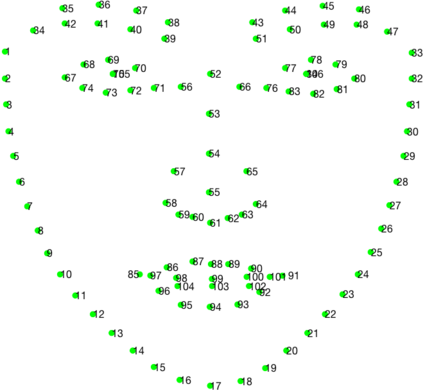
Facial landmark localization is a very crucial step in numerous face related applications, such as face recognition, facial pose estimation, face image synthesis, etc. However, previous competitions on facial landmark localization (i.e., the 300-W, 300-VW and Menpo challenges) aim to predict 68-point landmarks, which are incompetent to depict the structure of facial components. In order to overcome this problem, we construct a challenging dataset, named JD-landmark. Each image is manually annotated with 106-point landmarks. This dataset covers large variations on pose and expression, which brings a lot of difficulties to predict accurate landmarks. We hold a 106-point facial landmark localization competition1 on this dataset in conjunction with IEEE International Conference on Multimedia and Expo (ICME) 2019. The purpose of this competition is to discover effective and robust facial landmark localization approaches.
翻译:然而,以往关于面部标志化的竞赛(即300-W、300-VW和Menpo挑战)旨在预测68点标志,这些标志无法描述面部构件的结构。为了解决这一问题,我们建造了一个具有挑战性的数据集,名为JD-landmark。每个图像都是用106点标志手工加注的。这个数据集覆盖了面部和表情的巨大变化,这给预测准确的地标带来许多困难。 我们与IEEE 多媒体和博览会国际会议(ICME) 2019 一起,在这一数据集上举行了106点的面部标志化竞赛1。 这场竞争的目的是发现有效和稳健的面部标志化方法。