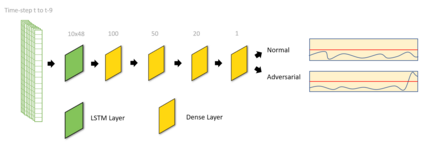
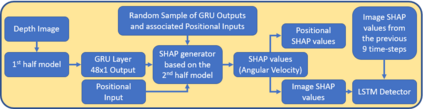
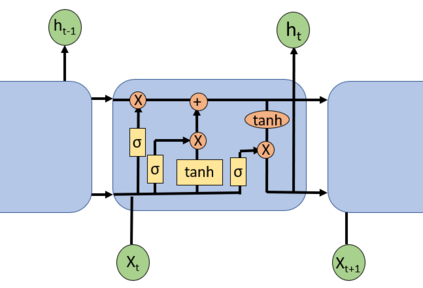
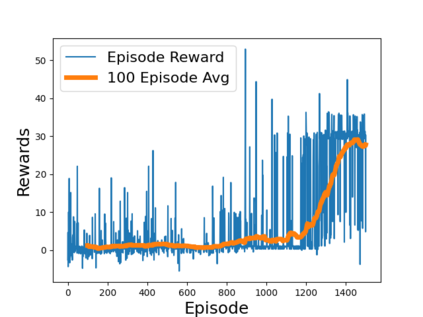
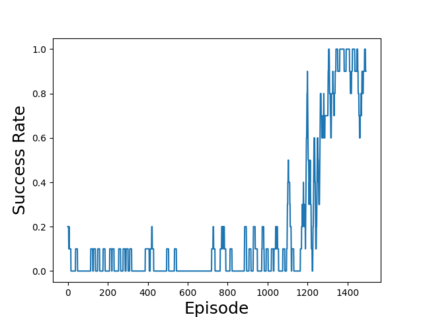
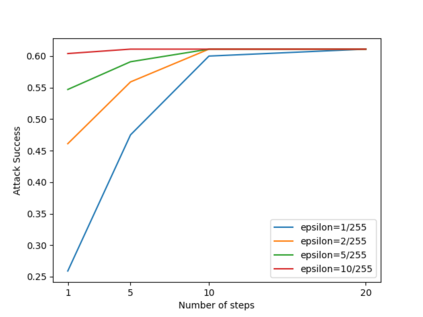
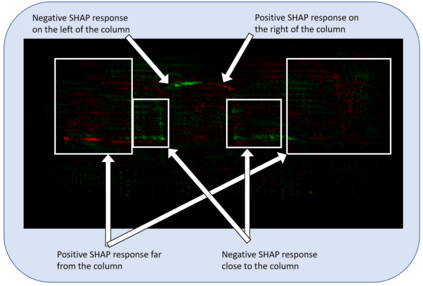
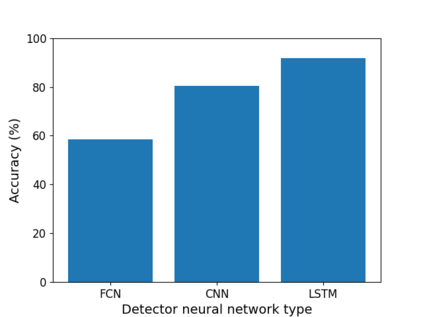
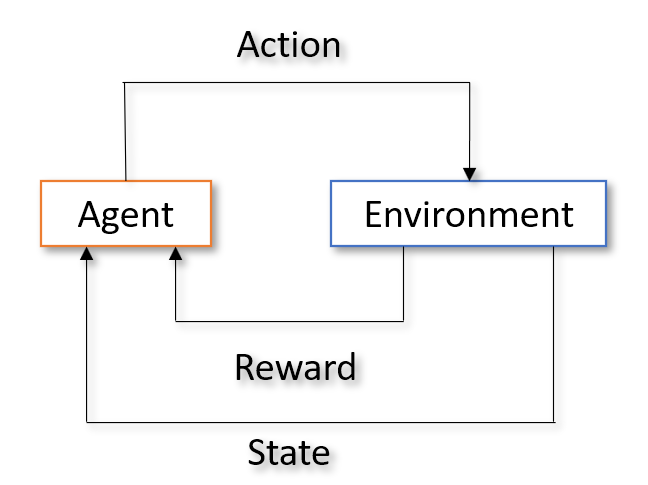
The danger of adversarial attacks to unprotected Uncrewed Aerial Vehicle (UAV) agents operating in public is growing. Adopting AI-based techniques and more specifically Deep Learning (DL) approaches to control and guide these UAVs can be beneficial in terms of performance but add more concerns regarding the safety of those techniques and their vulnerability against adversarial attacks causing the chances of collisions going up as the agent becomes confused. This paper proposes an innovative approach based on the explainability of DL methods to build an efficient detector that will protect these DL schemes and thus the UAVs adopting them from potential attacks. The agent is adopting a Deep Reinforcement Learning (DRL) scheme for guidance and planning. It is formed and trained with a Deep Deterministic Policy Gradient (DDPG) with Prioritised Experience Replay (PER) DRL scheme that utilises Artificial Potential Field (APF) to improve training times and obstacle avoidance performance. The adversarial attacks are generated by Fast Gradient Sign Method (FGSM) and Basic Iterative Method (BIM) algorithms and reduced obstacle course completion rates from 80\% to 35\%. A Realistic Synthetic environment for UAV explainable DRL based planning and guidance including obstacles and adversarial attacks is built. Two adversarial attack detectors are proposed. The first one adopts a Convolutional Neural Network (CNN) architecture and achieves an accuracy in detection of 80\%. The second detector is developed based on a Long Short Term Memory (LSTM) network and achieves an accuracy of 91\% with much faster computing times when compared to the CNN based detector.
翻译:使用基于AI的技术和更具体的深学习(DL)方法来控制和引导这些无人驾驶飞行器,在性能方面可能是有益的,但对于这些技术的安全性及其在对抗性攻击导致碰撞机会的易遭受性攻击时,在代理人变得困惑时,这些技术的安全性及其在对抗性攻击导致碰撞可能性的脆弱性增加了更多的关切。本文件建议采取基于DL方法的解释性创新方法,以建立一个高效的探测器,保护这些DL计划,从而使无人驾驶飞行器不受潜在的攻击。该代理人正在采用深强化学习(DRL)方法来控制和规划这些无人驾驶飞行器。该代理人正在采用深威慑性政策梯度梯度(DPHG)方法来控制和指导这些无人驾驶飞行器,但对于这些技术的安全性和对抗性攻击的易发生风险性攻击,则采用基于快速信号信号(FGSM)和基本透性方法(BIM)的对抗性攻击算法,以及从80°C至35°C(DMAR)的第一次测试完成率率,这是基于真实性货币感官测试网络的快速性攻击规划,一个基于真实的自动同步环境。