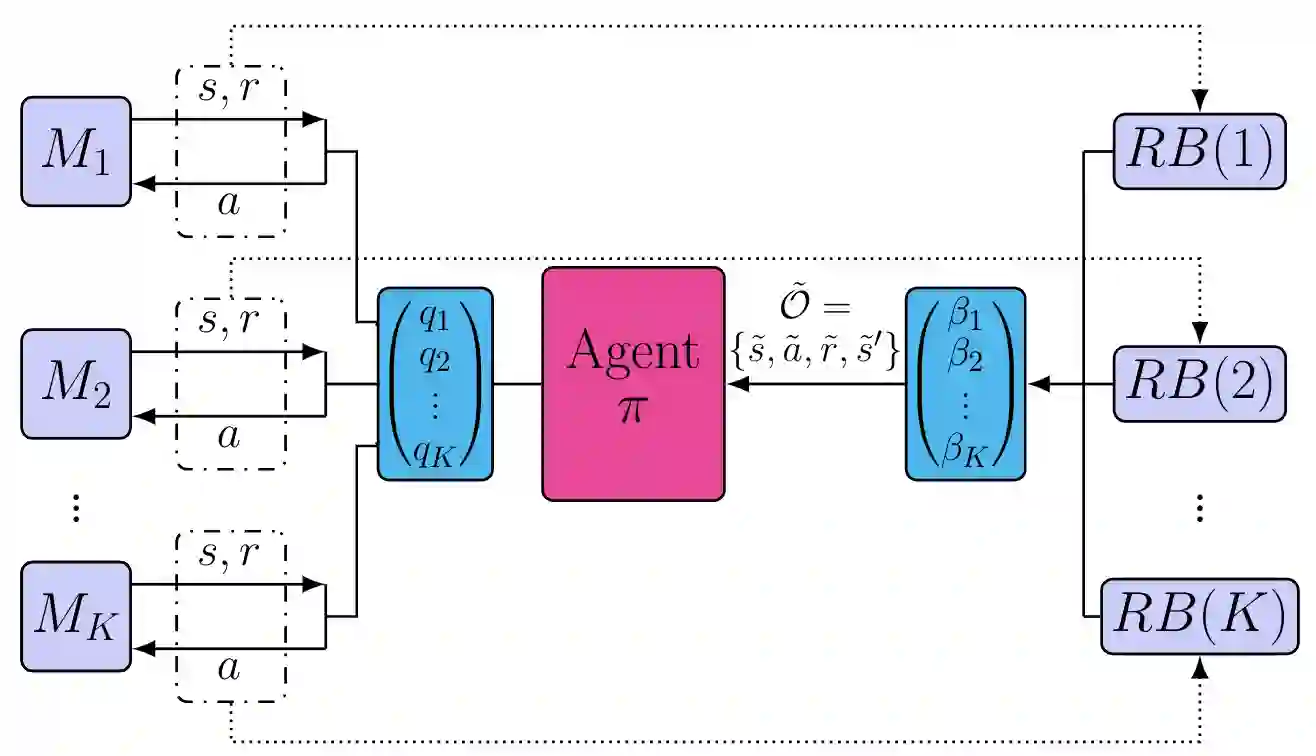
Simulation is used extensively in autonomous systems, particularly in robotic manipulation. By far, the most common approach is to train a controller in simulation, and then use it as an initial starting point for the real system. We demonstrate how to learn simultaneously from both simulation and interaction with the real environment. We propose an algorithm for balancing the large number of samples from the high throughput but less accurate simulation and the low-throughput, high-fidelity and costly samples from the real environment. We achieve that by maintaining a replay buffer for each environment the agent interacts with. We analyze such multi-environment interaction theoretically, and provide convergence properties, through a novel theoretical replay buffer analysis. We demonstrate the efficacy of our method on a sim-to-real environment.
翻译:模拟在自主系统中广泛使用,特别是在机器人操作中。 最常用的方法是模拟训练控制器,然后将其作为实际系统的初步起点。 我们演示如何同时从模拟和与实际环境的互动中学习。 我们提出一种算法,以平衡来自高吞量但不太精确的模拟的大量样本和来自真实环境的低吞量、高不洁和昂贵的样本。 我们通过对代理人互动的每个环境保持一个回放缓冲来实现这一点。 我们从理论上分析这种多环境互动,并通过新颖的理论回放缓冲分析提供趋同特性。 我们展示了我们方法在模拟到现实环境中的功效。