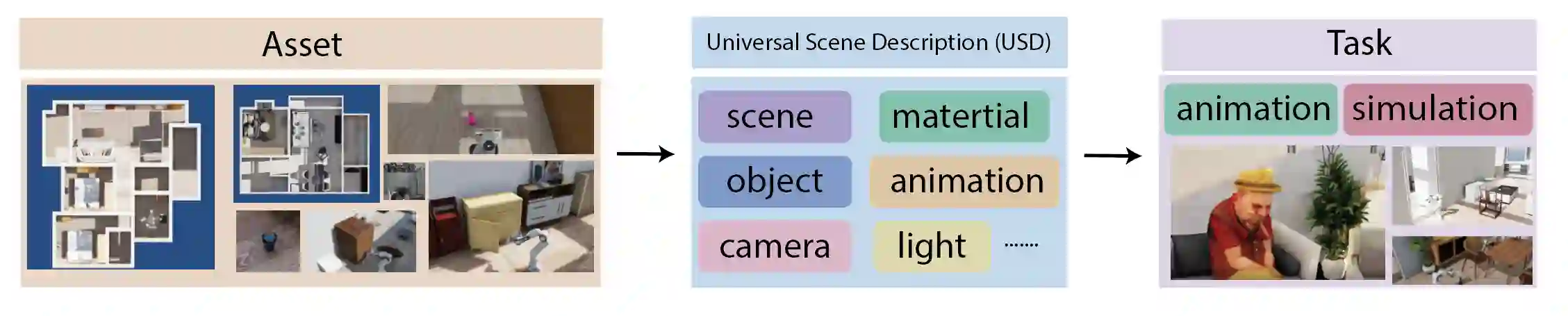
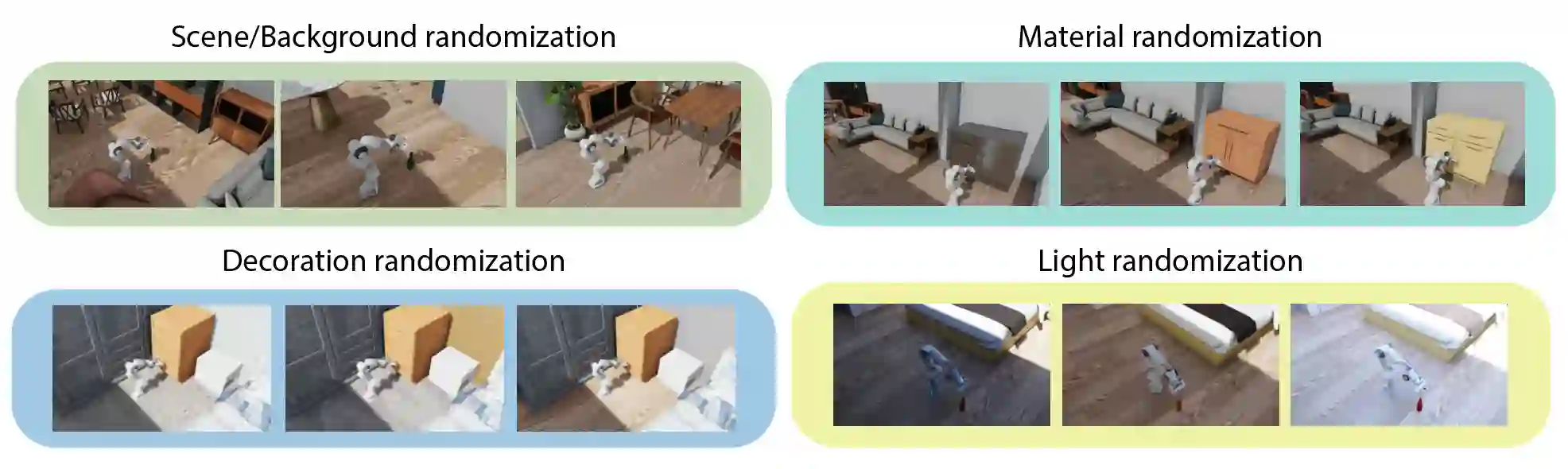
With the recent progress of simulations by 3D modeling software and game engines, many researchers have focused on Embodied AI tasks in the virtual environment. However, the research community lacks a platform that can easily serve both indoor scene synthesis and model benchmarking with various algorithms. Meanwhile, computer graphics-related tasks need a toolkit for implementing advanced synthesizing techniques. To facilitate the study of indoor scene building methods and their potential robotics applications, we introduce INDOORKIT: a built-in toolkit for NVIDIA OMNIVERSE that provides flexible pipelines for indoor scene building, scene randomizing, and animation controls. Besides, combining Python coding in the animation software INDOORKIT assists researchers in creating real-time training and controlling avatars and robotics. The source code for this toolkit is available at https://github.com/realvcla/VRKitchen2.0-Tutorial, and the tutorial along with the toolkit is available at https://vrkitchen20-tutorial.readthedocs.io/en/
翻译:随着3D模拟软件和游戏引擎的模拟最近的进展,许多研究人员侧重于虚拟环境中的人工智能任务,然而,研究界缺乏一个能够方便地以各种算法为室内场面合成和模型基准设定提供室内现场合成和模型基准的平台;同时,与计算机图形有关的任务需要一套工具包,以实施先进的合成技术;为便利研究室内场景建筑方法及其潜在的机器人应用,我们引入了INDOORKIT:NVIDIA OMNIVERSE的内置工具包,为室内场景建筑、现场随机化和动画控制提供灵活的管道。此外,将Python编码结合到动画软件INNDOORKIT中协助研究人员创建实时培训和控制动画和机器人。该工具包的源代码见https://github.com/realvcla/VRKitchen2.0-Tultominal,该工具包与工具包一起可在https://vrkitchen20-tutominal.readthedocs.io/en/en/docs查阅。