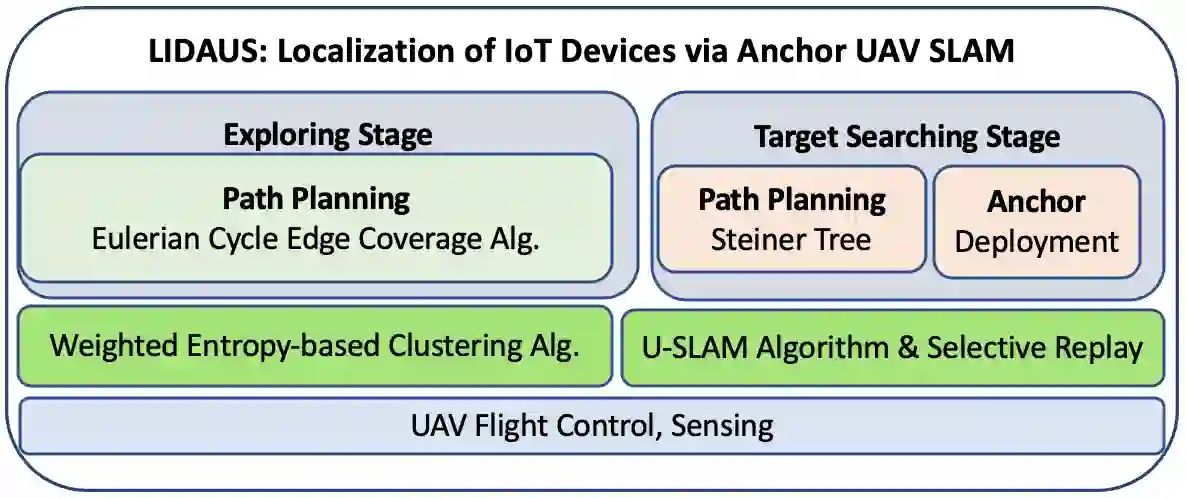
We introduce LIDAUS Localization of IoT Device via Anchor UAV SLAM), an infrastructure-free, multi-stage SLAM system that utilizes an Unmanned Aerial Vehicle (UAV) to accurately localize IoT devices in a 3D indoor space where GPS signals are unavailable or weak, e.g., manufacturing factories, disaster sites, or smart buildings. The lack of GPS signals and infrastructure support makes most of the existing indoor localization systems not practical when localizing a large number of wireless IoT devices. In addition, safety concerns, access restriction, and simply the huge amount of IoT devices make it not practical for humans to manually localize and track IoT devices. To address these challenges, the UAV in our LIDAUS system conducts multi-stage 3D SLAM trips to localize devices based only on RSSIs, the most widely available measurement of the signals of almost all commodity IoT devices. The main novelties of the system include a weighted entropy-based clustering algorithm to select high quality RSSI observation locations, a 3D U-SLAM algorithm that is enhanced by deploying anchor beacons along the UAV's path, and the path planning based on Eulerian cycles on multi-layer grid graphs that model the space in exploring stage and Steiner tree paths in searching stages. Our simulations and experiments of Bluetooth IoT devices have demonstrated that the system can achieve high localization accuracy based only on RSSIs of commodity IoT devices.
翻译:我们引进了LIDAUS 通过Anchor UAV SLAM将IOT设备本地化,这是一个无基础设施、多阶段的SLAM系统,利用无人驾驶航空飞行器(UAV)将IOT设备在3D室内空间精确本地化,那里的全球定位系统信号不存在或薄弱,例如,制造厂房、灾害现场或智能建筑;由于缺乏全球定位系统信号和基础设施支持,现有大多数室内本地化系统在将大量无线IOT设备本地化时不切实际。此外,安全关切、准入限制和大量IOT设备使人类无法手动本地化和跟踪IOT设备。为了应对这些挑战,我们LIDAUS系统中的UAVAV进行多阶段3D SLAM旅行,将仅以RSIS、灾害现场测量几乎所有商品IOT装置信号的最广泛可得的测量。该系统的主要新颖之处包括:在选择高质量的RSI观测地点时,基于高质量的基于RISI的本地集群集群集群集群组合算法,3D U-SLAM系统算法,通过在基于UAVA的高层信标路路段上搜索基于UAIS的BLARC路段,从而在BARCLALALALALALALALALA的轨道上展示路路路路路路段,从而得以加强。