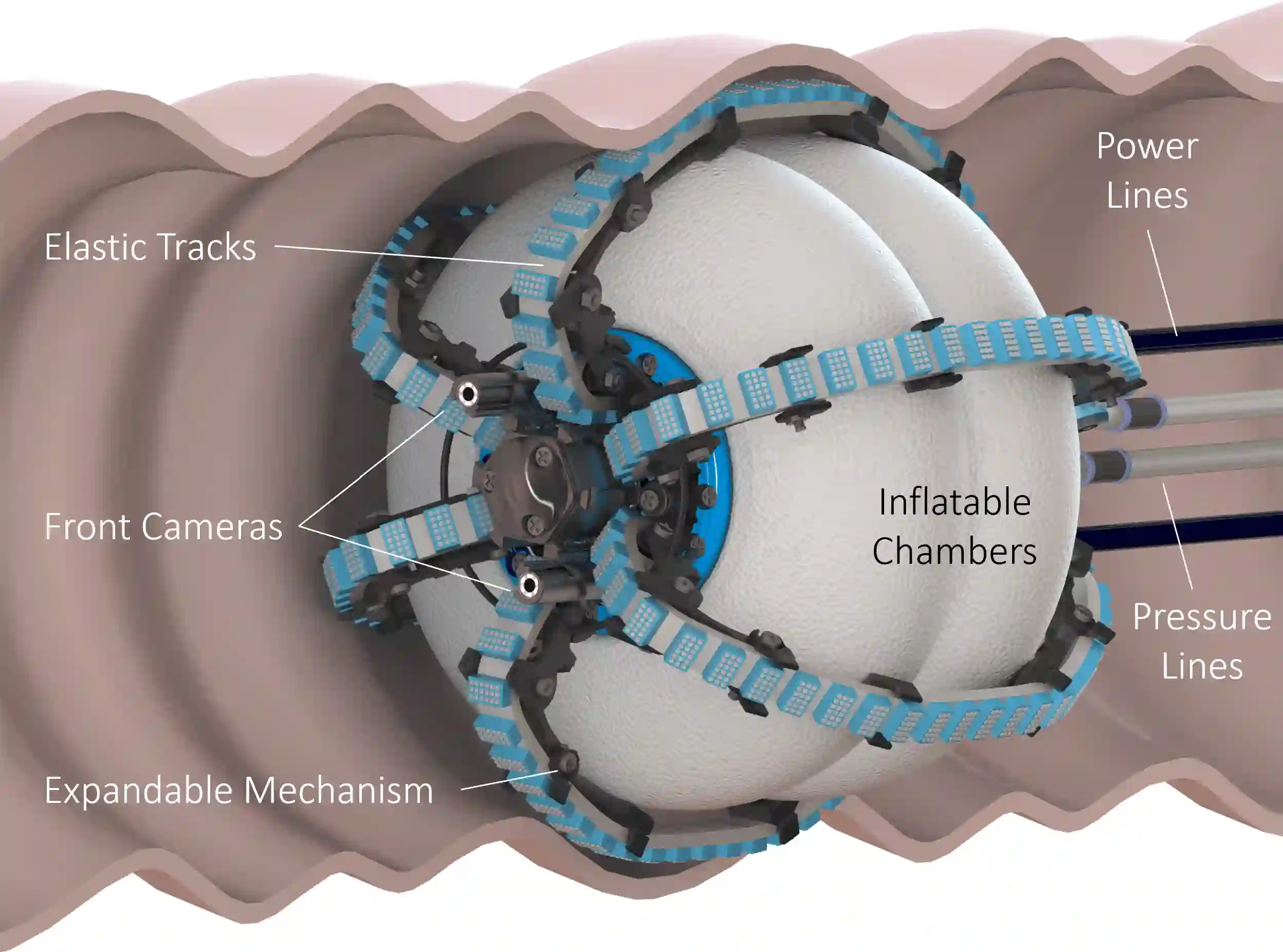
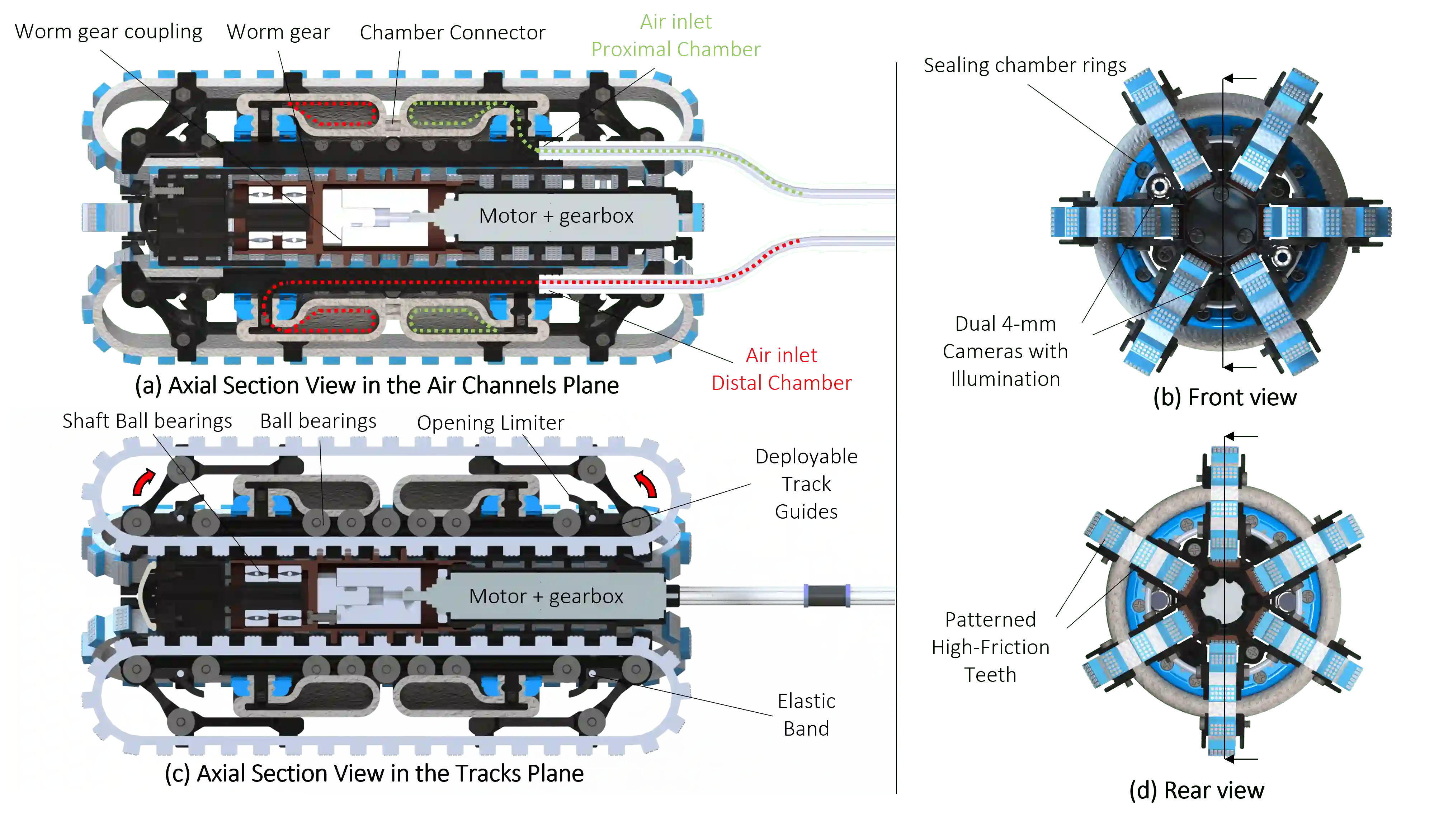
Colonoscopy is considered the golden standard for cancer screening of the lower gastrointestinal (GI) tract, with screening programs all over the world considering lowering the recommended screening age. Nonetheless, conventional colonoscopy can cause discomfort to patients due to the forces occurring between colonoscopes and the walls of the colon. Robotic solutions have been proposed to reduce discomfort, and improve accessibility and image quality. Aiming at addressing the limitations of traditional and robotic colonoscopy, in this paper, we present the SoftSCREEN System, a novel Soft Shapeshifting Capsule Robot for Endoscopy based on Eversion Navigation. A plurality of tracks surrounds the body of the system. These tracks are driven by a single motor paired with a worm gear and evert from the internal rigid chassis, enabling fullbody track-based navigation. Two inflatable toroidal chambers enclosing this rigid chassis and passing through the tracks, cause them to displace when inflated. This displacement can be used to regulate the contact with the surrounding wall, thus enabling traction control and adjustment of the overall system diameter to match the local lumen size. The design of the first tethered prototype at 2:1 scale of the SoftSCREEN system is presented in this work. The experimental results show efficient navigation capabilities for different lumen diameters and curvatures, paving the way for a novel robot capable of robust navigation and reliable control of the imaging, with potential for applications beyond colonoscopy, including gastroscopy and capsule endoscopy.
翻译:科洛诺镜像被认为是下胃肠道癌症筛查的黄金标准,全球各地的筛查程序都考虑降低建议的筛查年龄。然而,常规结肠镜检查会因共生镜和结肠墙之间出现的力量而给病人带来不适。提出了机器人解决方案,以减少不适,改善可及性和图像质量。本文提出了软骨结肠镜检查系统,这是一个新的软形结构,用于根据Eversion导航进行内窥镜检查。尽管如此,常规结肠镜检查可能会使病人不适。提出了机器人解决方案,以减少不适,改善无障碍和图像质量。本文提出了传统和机器人结肠镜检查的局限性,我们提出了软骨质系统系统系统,在Eversion导航的基础上对内镜像进行新软骨形转换,从而能够对系统整体直径进行牵引力控制,从而对系统整体直径进行调整,包括直径直径的直径控制。