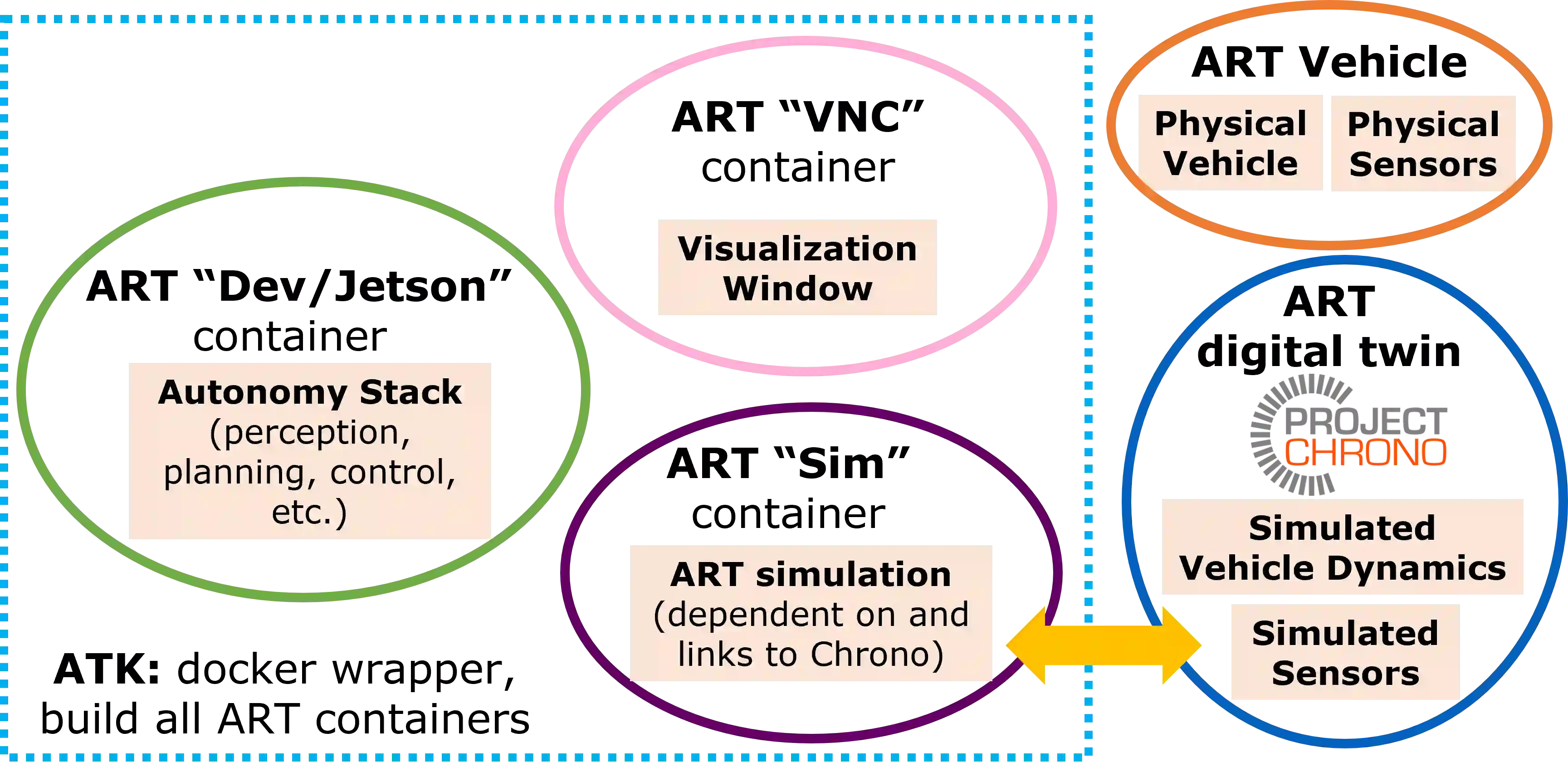
We discuss a platform that has both software and hardware components, and whose purpose is to support research into characterizing and mitigating the sim-to-real gap in robotics and vehicle autonomy engineering. The software is operating-system independent and has three main components: a simulation engine called Chrono, which supports high-fidelity vehicle and sensor simulation; an autonomy stack for algorithm design and testing; and a development environment that supports visualization and hardware-in-the-loop experimentation. The accompanying hardware platform is a 1/6th scale vehicle augmented with reconfigurable mountings for computing, sensing, and tracking. Since this vehicle platform has a digital twin within the simulation environment, one can test the same autonomy perception, state estimation, or controls algorithms, as well as the processors they run on, in both simulation and reality. A demonstration is provided to show the utilization of this platform for autonomy research. Future work will concentrate on augmenting ART/ATK with support for a full-sized Chevy Bolt EUV, which will be made available to this group in the immediate future.
翻译:我们讨论一个既拥有软件和硬件组件的平台,其宗旨是支持研究机器人和车辆自主工程中模拟到现实差距的定性和缩小。该软件是操作系统独立的,有三个主要组件:一个名为Chrono的模拟引擎,支持高不忠车辆和传感器模拟;一个用于算法设计和测试的自主堆;以及一个支持可视化和流动中硬件实验的开发环境。伴随的硬件平台是一个第1/6级的车辆,配有可重新配置的计算机、遥感和跟踪设备。由于该车辆平台在模拟环境中有一个数字双胞胎,人们可以在模拟和现实中测试同样的自主感知、状态估计或控制算法,以及它们运行的处理器。提供了演示,展示这一平台用于自主研究的使用情况。未来工作将侧重于增强ART/ATK,支持一个全尺寸的Chevy Bolt EUV,该设备将在近期提供给这一群体使用。