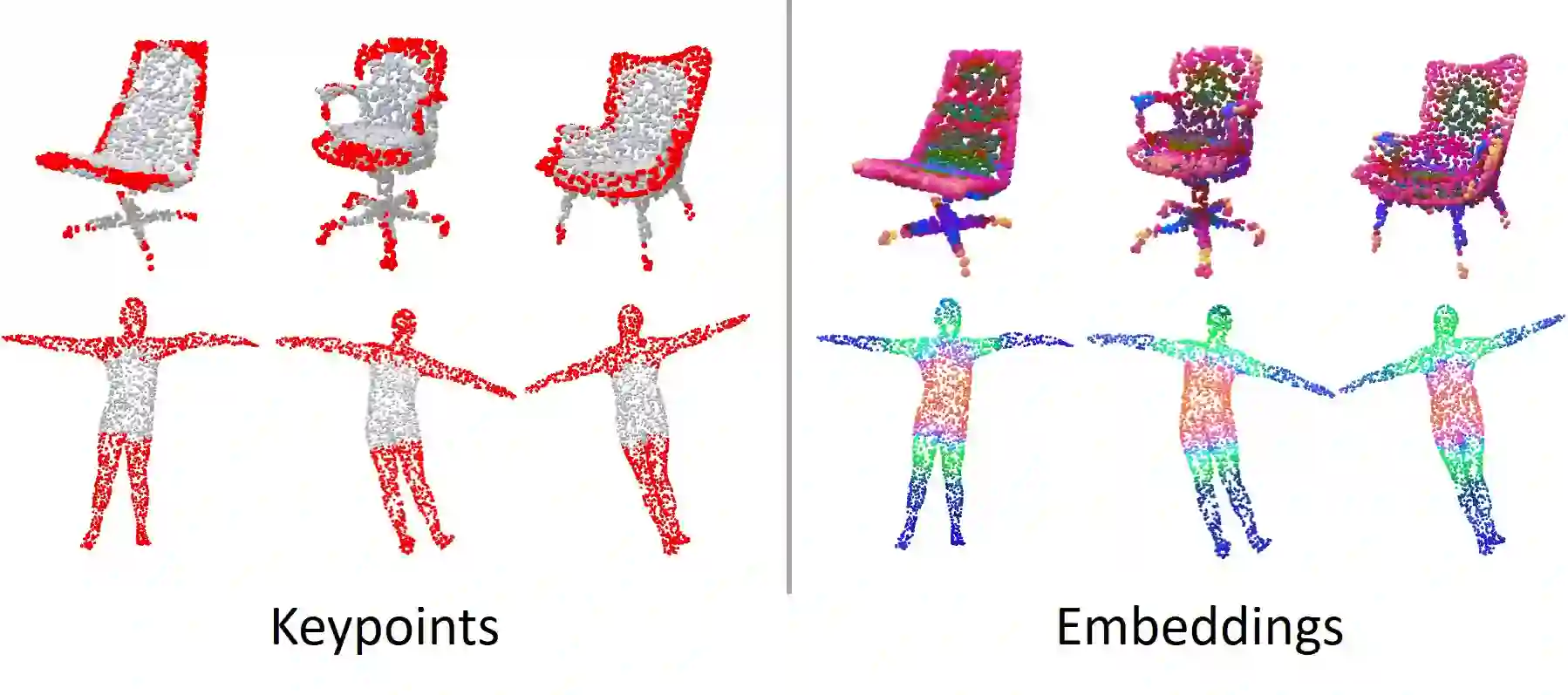
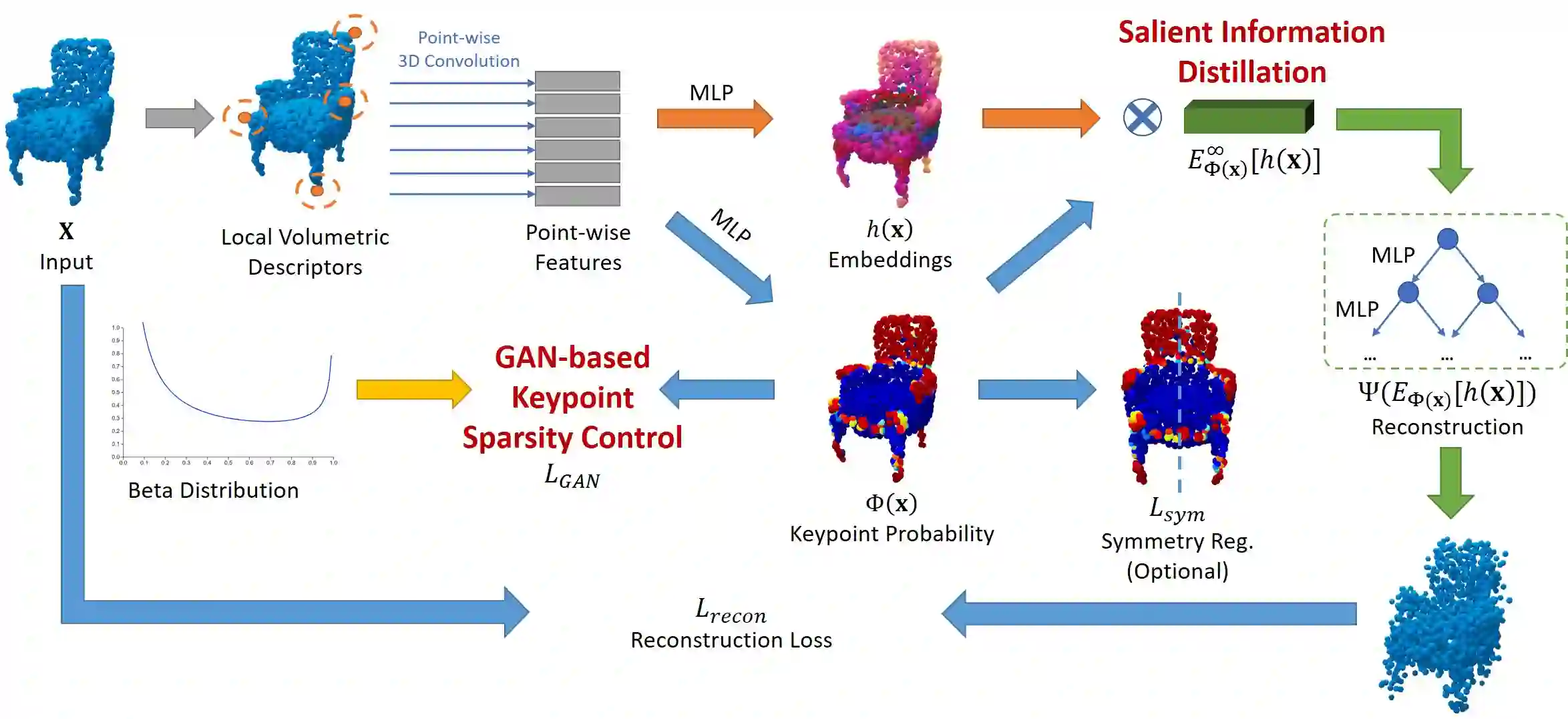
Keypoint detection is an essential component for the object registration and alignment. However, previous works mainly focused on how to register keypoints under arbitrary rigid transformations. Differently, in this work, we reckon keypoints under an information compression scheme to represent the whole object. Based on this, we propose UKPGAN, an unsupervised 3D keypoint detector where keypoints are detected so that they could reconstruct the original object shape. Two modules: GAN-based keypoint sparsity control and salient information distillation modules are proposed to locate those important keypoints. Extensive experiments show that our keypoints preserve the semantic information of objects and align well with human annotated part and keypoint labels. Furthermore, we show that UKPGAN can be applied to either rigid objects or non-rigid SMPL human bodies under arbitrary pose deformations. As a keypoint detector, our model is stable under both rigid and non-rigid transformations, with local reference frame estimation. Our code is available on https://github.com/qq456cvb/UKPGAN.
翻译:关键点检测是物体登记和校正的一个基本组成部分。然而,先前的工作主要侧重于如何在任意僵硬变换下登记关键点。不同地,我们在此工作中根据信息压缩方案对关键点进行计算,以代表整个对象。在此基础上,我们提议UKPGAN, 一个不受监督的三维关键点检测器, 一个不受监督的三维关键点检测器, 以便检测出原始物体形状。 有两个模块: 以 GAN 为基础的关键点扩散控制和突出信息蒸馏模块, 以定位这些重要的关键点。 广泛的实验显示, 我们的关键点保存着物体的语义信息, 并且与人的注释部分和关键点标签保持良好一致。 此外, 我们显示, UKPGAN 既可以适用于僵硬的物体,也可以适用于处于任意变形状态的非硬的 SMPL 人类身体。 作为关键点检测器, 我们的模型在硬性和非硬性和非硬性变换中保持稳定, 并附有本地参考框架估计。我们的代码可以在 https://github.com/q456c/UKPGPGAN上查阅。