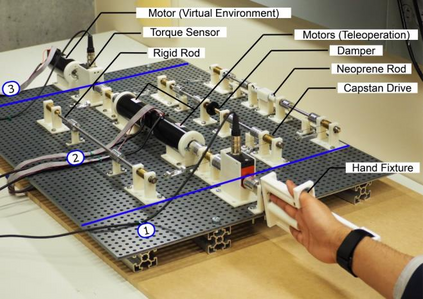
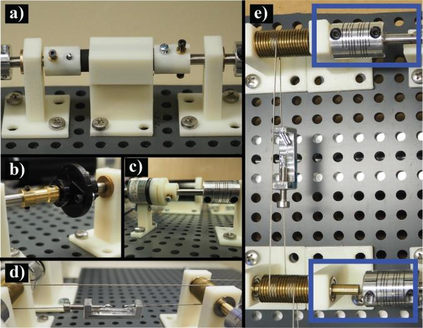
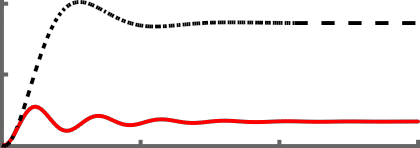
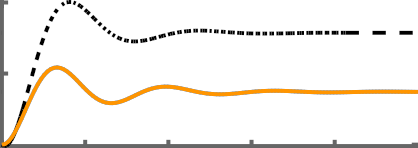
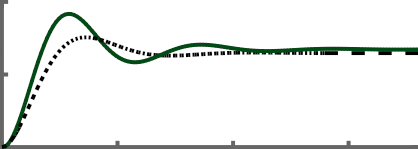
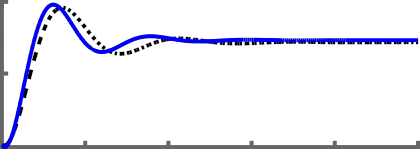
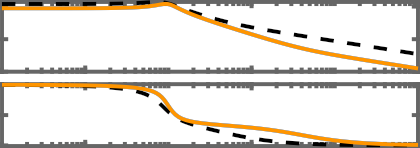
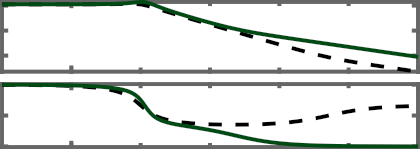
Human-in-the-loop telerobotic systems (HiLTS) are robotic tools designed to extend and in some circumstances improve the dexterous capabilities of the human operator in virtual and remote environments. Dexterous manipulation, however, depends on how well the telerobot is incorporated into the operator's sensorimotor control scheme. Empirical evidence suggests that haptic feedback can lead to improved dexterity. Unfortunately, haptic feedback can also introduce dynamics between the leader and follower of the telerobot that affect both stability and device performance. While concerted research effort has focused on masking these device dynamics or bypassing them altogether, it is not well understood how human operators incorporate these dynamics into their control scheme. We believe that to advance dexterous telerobotic manipulation, it is crucial to understand the process by which humans operators incorporate teleoperator dynamics and distinguish them from the dynamics of the environment. Key to this knowledge is an understanding of how advanced telerobotic architectures compare to the gold standard, the rigid mechanical teleoperators first introduced in the 1950's. In this manuscript, we present a teleoperator testbed that has reconfigurable transmissions between the leader and follower to change its dynamic behavior. The intent of this testbed is to investigate the effect of the teleoperator's dynamics on perception of and task performance in the remote/virtual environment. We describe the hardware and software components of the testbed and then demonstrate how the different teleoperator transmissions can lead to differences, sometimes significant, in the dynamics that would be felt by the operator when exploring the same environment.
翻译:人类在远处的远程机器人系统(HiLTS)是机器人工具,旨在扩展和在某些情况下提高虚拟和远程环境中人类操作员的超能力。 然而,不透明的操纵取决于操作员在操作员的感官模仪控制计划中纳入多细多细。 经验性证据表明, 偶然反馈可以带来更好的灵活性。 不幸的是, 随机反馈也可以在调频器的领导者和追随者之间引入动态, 既影响稳定性,也影响设备性能。 虽然协调一致的研究工作侧重于掩盖这些装置的动态或完全绕过它们, 但人们并不清楚人类操作员如何将这些动态纳入到其控制方案。 但是,我们认为, 要推进远程机器人操作员的感官控制方案, 关键在于理解人类操作员采用电传频操作器动态, 并区分它们与环境的动态。 这种知识的关键在于理解远程机器人结构如何与黄金标准相比较, 1950年代首次引入的硬性机械远程操作器是如何在远程操作器中隐藏的。 在这张手稿中, 我们展示了远程操作器的感官感官感官的感官感官感官感官感知力感官的感官的感知力, 测试力感官的感官对环境的感官环境的感官的感官的感官的感官测试, 测试力感官环境的感官的知力感官环境的感官是,我们到感官到感官到感官到感官到感官到感官到感官的性能变。