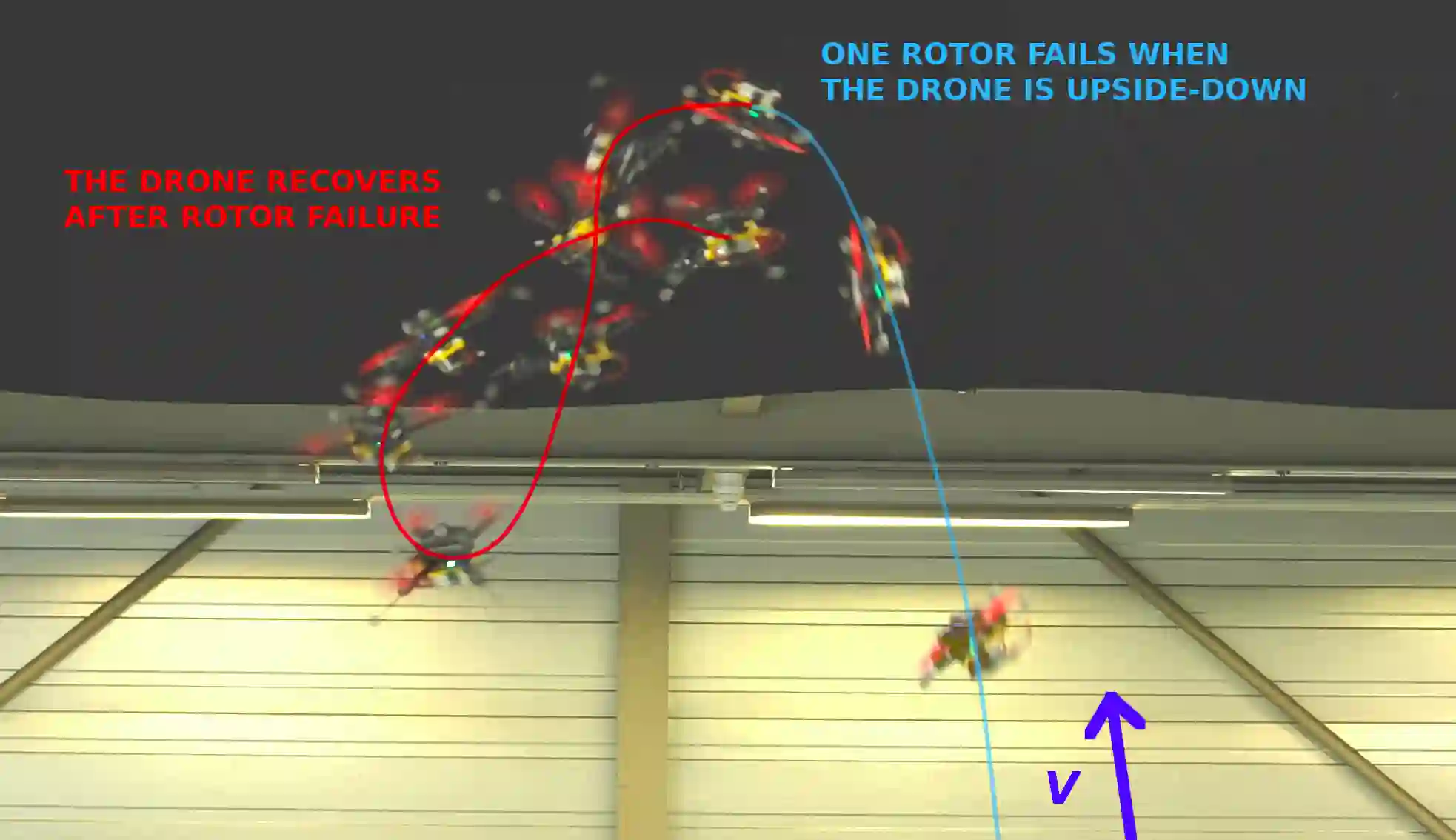
The mechanical simplicity, hover capabilities, and high agility of quadrotors lead to a fast adaption in the industry for inspection, exploration, and urban aerial mobility. On the other hand, the unstable and underactuated dynamics of quadrotors render them highly susceptible to system faults, especially rotor failures. In this work, we propose a fault-tolerant controller using the nonlinear model predictive control (NMPC) to stabilize and control a quadrotor subjected to the complete failure of a single rotor. Differently from existing works that either rely on linear assumptions or resort to cascaded structures neglecting input constraints in the outer-loop, our method leverages full nonlinear dynamics of the damaged quadrotor and considers the thrust constraint of each rotor. Hence, this method can seamlessly transition from nominal to rotor failure flights, and effectively perform upset recovery from extreme initial conditions. Extensive simulations and real-world experiments are conducted for validation, which demonstrates that the proposed NMPC method can effectively recover the damaged quadrotor even if the failure occurs during aggressive maneuvers, such as flipping and tracking agile trajectories.
翻译:在这项工作中,我们提议使用非线性模型预测控制(NMPC)来稳定和控制受单一转子完全失灵影响的四氧化磷,这不同于现有的工程,即依靠线性假设或采用不考虑外部环流输入限制的连锁结构,我们的方法利用了受损的四氧化磷的完全非线性动态,并考虑了每个转子的推力限制。因此,这种方法可以顺利地从名义飞行过渡到转子机故障飞行,并有效地使极端初始条件下的恢复工作中断。为了验证,进行了广泛的模拟和实际世界实验,这表明拟议的NMPC方法可以有效地恢复受损的四氧化磷,即使这种失败是在诸如翻转和跟踪螺旋形等攻击性动作中发生的。