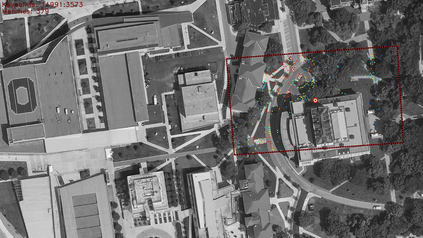
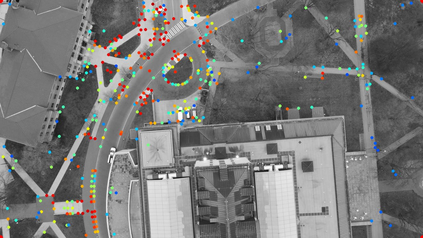
The Global Positioning System (GPS) has become a part of our daily life with the primary goal of providing geopositioning service. For an unmanned aerial system (UAS), geolocalization ability is an extremely important necessity which is achieved using Inertial Navigation System (INS) with the GPS at its heart. Without geopositioning service, UAS is unable to fly to its destination or come back home. Unfortunately, GPS signals can be jammed and suffer from a multipath problem in urban canyons. Our goal is to propose an alternative approach to geolocalize a UAS when GPS signal is degraded or denied. Considering UAS has a downward-looking camera on its platform that can acquire real-time images as the platform flies, we apply modern deep learning techniques to achieve geolocalization. In particular, we perform image matching to establish latent feature conjugates between UAS acquired imagery and satellite orthophotos. A typical application of feature matching suffers from high-rise buildings and new constructions in the field that introduce uncertainties into homography estimation, hence results in poor geolocalization performance. Instead, we extract GIS information from OpenStreetMap (OSM) to semantically segment matched features into building and terrain classes. The GIS mask works as a filter in selecting semantically matched features that enhance coplanarity conditions and the UAS geolocalization accuracy. Once the paper is published our code will be publicly available at https://github.com/OSUPCVLab/UbihereDrone2021.
翻译:全球定位系统(GPS)已成为我们日常生活的一部分,其主要目标是提供地理定位服务。对于无人驾驶航空系统(UAS)而言,地理定位能力是一个极其重要的需要,这是使用Inertial导航系统(INS)实现的;没有地理定位服务,UAS就无法飞到目的地或返回家乡。不幸的是,全球定位系统信号可能卡住,并受到城市峡谷的多路径问题的影响。我们的目标是提出一种替代办法,在全球定位系统信号退化或被拒绝时,将UAS地理定位化。考虑到UAS在其平台上有一个可随着平台飞动获得实时图像的向下看的相机,我们运用现代深层学习技术实现地理定位。特别是,我们进行图像匹配,以建立UAS获得的图像与卫星或星光图之间的潜在特征连接。特征的典型应用来自高层建筑和实地的新构造,这些特征将给同地测量估计带来不确定性,从而导致对地平面的绩效。相反,我们从OFOTS/地勤系统(OSBS)的地理定位系统信息,将Seal-mabrial malial malial 系统进行升级,以提升我们现有的磁系统和SIM系统。