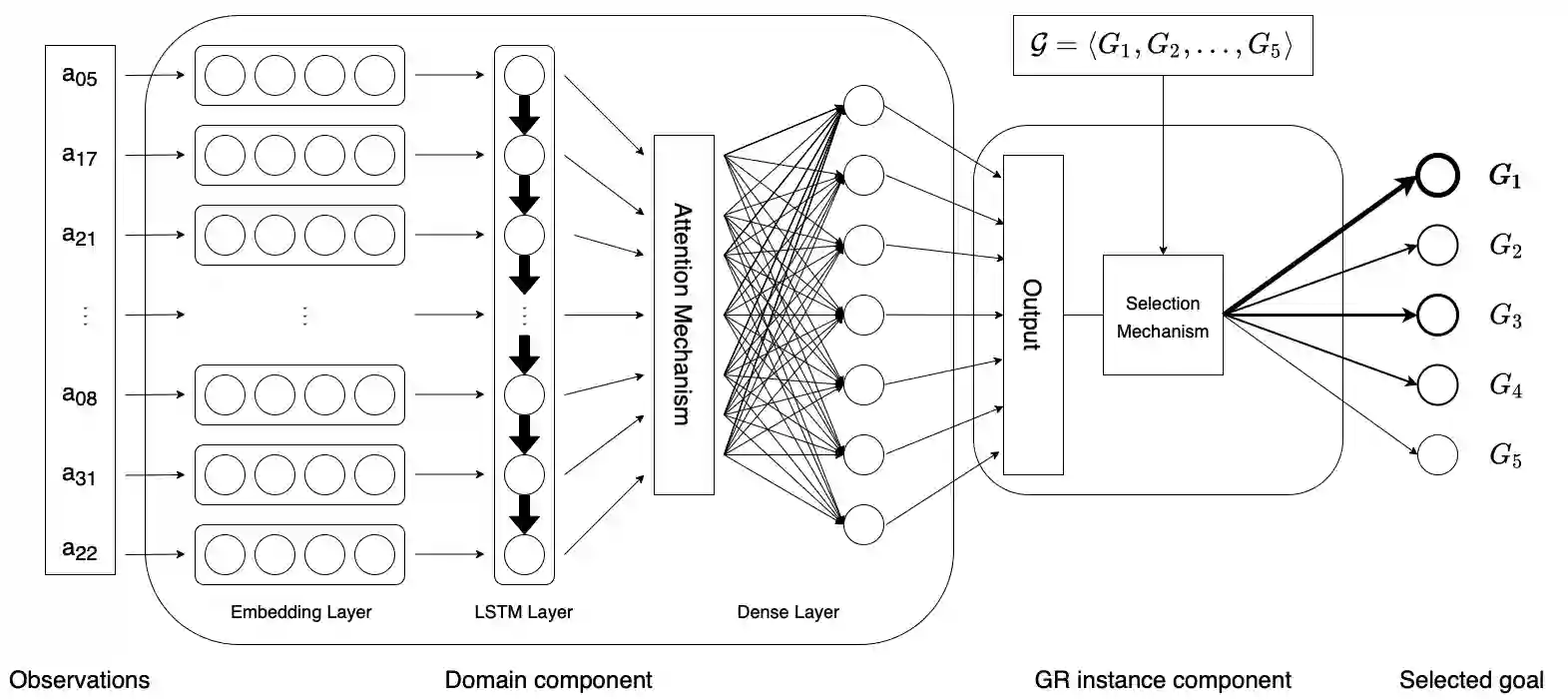
In automated planning, recognising the goal of an agent from a trace of observations is an important task with many applications. The state-of-the-art approaches to goal recognition rely on the application of planning techniques, which requires a model of the domain actions and of the initial domain state (written, e.g., in PDDL). We study an alternative approach where goal recognition is formulated as a classification task addressed by machine learning. Our approach, called GRNet, is primarily aimed at making goal recognition more accurate as well as faster by learning how to solve it in a given domain. Given a planning domain specified by a set of propositions and a set of action names, the goal classification instances in the domain are solved by a Recurrent Neural Network (RNN). A run of the RNN processes a trace of observed actions to compute how likely it is that each domain proposition is part of the agent's goal, for the problem instance under considerations. These predictions are then aggregated to choose one of the candidate goals. The only information required as input of the trained RNN is a trace of action labels, each one indicating just the name of an observed action. An experimental analysis confirms that \our achieves good performance in terms of both goal classification accuracy and runtime, obtaining better performance w.r.t. a state-of-the-art goal recognition system over the considered benchmarks.
翻译:在自动化规划中,认识到从观察的痕量中确定一个代理人的目标是一项重要任务,有许多应用。最先进的目标确认方法取决于规划技术的应用,这需要一种域行动和初始域状态的模式(例如,在PDDL中)。我们研究一种替代办法,即目标确认是作为机器学习处理的分类任务拟订的。我们称为GRNet的方法的主要目的是通过学习如何在特定领域解决这一问题,使目标确认更加准确和更快。考虑到一套提议和一套行动名称所指定的规划领域,一个经常性神经网络(NNNN)解决了该领域的目标分类实例。运行RNN进程的一个观察行动线索,用以计算每个域的提议是否可能是机构目标的一部分,供考虑的问题实例。然后将这些预测汇总,以选择一个候选目标。这些预测所需的唯一信息是行动标志的痕迹,每个都只表示观察到的行动的名称。一个测试性指标的精确度,一个实验性分析确认两个目标都达到良好的业绩指标。