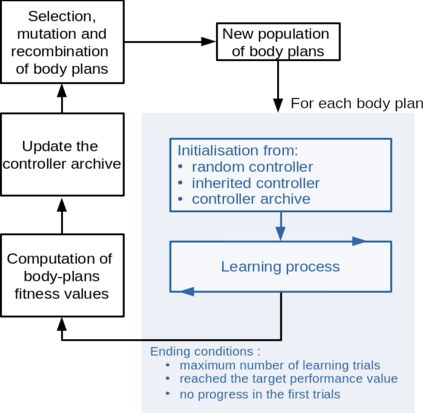
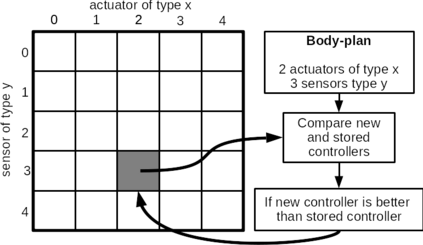
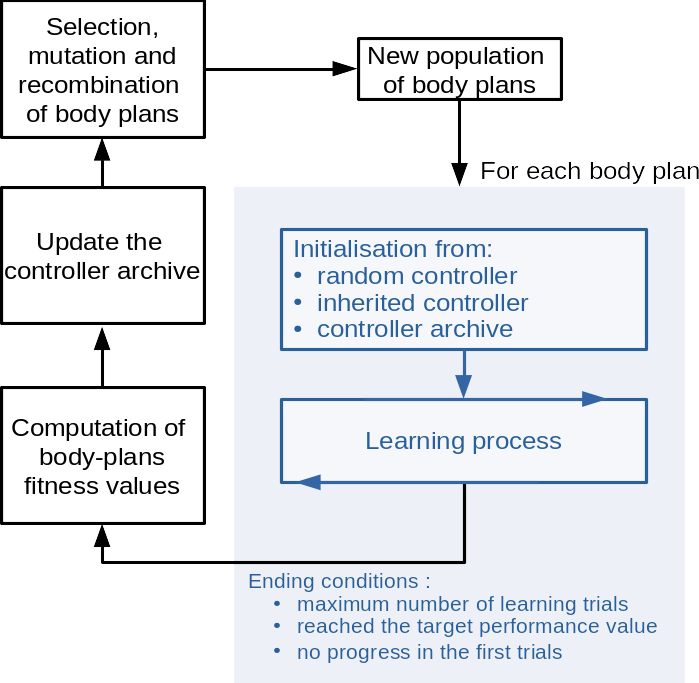
The joint optimisation of body-plan and control via evolutionary processes can be challenging in rich morphological spaces in which offspring can have body-plans that are very different from either of their parents. This causes a potential mismatch between the structure of an inherited controller and the new body. To address this, we propose a framework that combines an evolutionary algorithm to generate body-plans and a learning algorithm to optimise the parameters of a neural controller. The topology of this controller is created once the body-plan of each offspring body-plan is generated. The key novelty of the approach is to add an external archive for storing learned controllers that map to explicit `types' of robots (where this is defined with respect the features of the body-plan). By learning from a controller with an appropriate structure inherited from the archive, rather than from a randomly initialised one, we show that both the speed and magnitude of learning increases over time when compared to an approach that starts from scratch, using two tasks and three environments. The framework also provides new insights into the complex interactions between evolution and learning.
翻译:通过进化过程对机体计划和控制进行联合优化在丰富的形态空间中可能具有挑战性,在这种空间中,后代可以拥有与其父母中的任何一方截然不同的体力计划。这可能造成继承的控制器结构与新身体结构之间的不匹配。为了解决这个问题,我们提议了一个框架,将进化算法与优化神经控制器参数的学习算法结合起来。这个控制器的地形学一旦产生每个子体计划的身体计划,就将形成。这个方法的关键新颖之处是增加一个外部档案,用于储存学习的控件,用于绘制“类型的”机器人(在定义中要尊重机体计划特征的情况下)。通过向拥有从档案中继承的适当结构的控制器学习,而不是从随机开始的结构学习,我们表明学习的速度和规模随着时间的增加而增加,与从零开始的方法相比,使用两个任务和三个环境。这个框架还为进化和学习之间的复杂互动提供了新的洞察力。