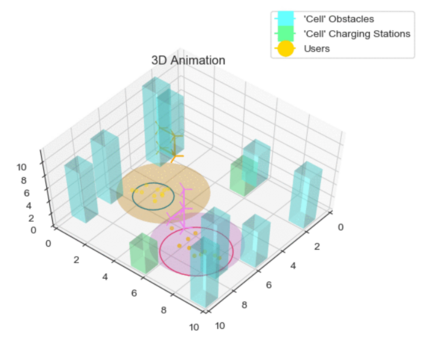
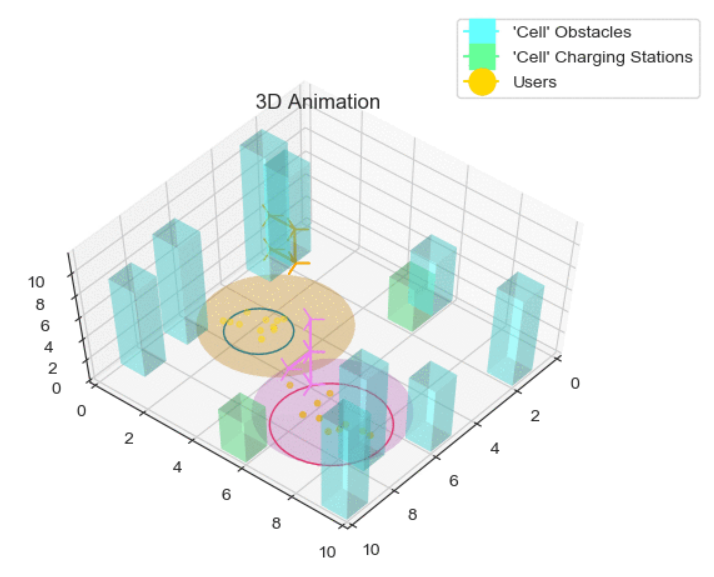
We design a multi-purpose environment for autonomous UAVs offering different communication services in a variety of application contexts (e.g., wireless mobile connectivity services, edge computing, data gathering). We develop the environment, based on OpenAI Gym framework, in order to simulate different characteristics of real operational environments and we adopt the Reinforcement Learning to generate policies that maximize some desired performance.The quality of the resulting policies are compared with a simple baseline to evaluate the system and derive guidelines to adopt this technique in different use cases. The main contribution of this paper is a flexible and extensible OpenAI Gym environment, which allows to generate, evaluate, and compare policies for autonomous multi-drone systems in multi-service applications. This environment allows for comparative evaluation and benchmarking of different approaches in a variety of application contexts.
翻译:我们为自主无人驾驶航空器设计一个多功能环境,在不同应用环境(例如无线移动连接服务、边缘计算、数据收集)提供不同的通信服务。我们根据OpenAI Gym框架开发环境,以模拟实际操作环境的不同特征,我们采用强化学习来制定政策,最大限度地提高某些预期绩效。由此形成的政策的质量与简单的基线进行比较,以评价系统,为在不同使用情况下采用这一技术制定指导方针。本文件的主要贡献是灵活和可扩展的OpenAI Gym环境,允许生成、评估和比较多功能应用中自主多轨道系统的政策。这种环境允许在各种应用情况下对不同方法进行比较评估和基准。