![]()
如何保证 L4 级自动驾驶系统的普适性,同时找到自动驾驶车辆成本、规模化之间的平衡点?近日,此前已经在自动驾驶网约巴士(Robobus)领域打出声量的轻舟智航推出了
全新的 Driven-by-QCraft 第三代 L4 级自动驾驶硬件方案
,在适配多种车型的同时,做到了高效与场景通用。其中传感器套件结合了多类先进高精度传感器的特点,实现了 360 度无盲区感知,具备极强的稳定性和实时性。同时在传感器、计算平台、电源、通信等模块均采用全冗余设计。
在 NVIDIA GTC 大会上,他们又宣布牵手英伟达,在 Driven-by-QCraft 硬件方案中率先使用英伟达的 DRIVE Orin 芯片,让 L4 级自动驾驶的计算平台迈向量产车规级,这也意味着轻舟智航成为
首个使用 NVIDIA DRIVE Orin 的 L4 级自动驾驶通用方案公司
。
目前,轻舟智航搭载同一硬件方案的自动驾驶车辆已在美国硅谷、中国北京、深圳、苏州等全球 10 座城市落地测试和运营,部署车辆型号 10 款,车队数量将近百台,能够应对闹市、暴雨、隧道等多类场景。其中,龙舟 ONE 首款自动驾驶小巴已成功在苏州、深圳、武汉等六座城市落地常态化运营,是国内布局城市最多的公开道路自动驾驶小巴。
作为国内 Robobus 的领跑者,2020 年轻舟智航在苏州启动了全国首个常态化运营的 5G 自动驾驶公交项目,2021 年 10 月无锡发布全国首个公开道路 5G 自动驾驶网约巴士,并宣布将在无锡市核心 CBD 区域启动 3 条微循环公交线路常态化运营,为市民日常通勤提供安全、便捷的接驳服务。
![]()
如此高效迅捷的落地能力离不开自动驾驶技术平台的支撑,基于各项自研技术成果,轻舟智航推出了“Driven-by-QCraft”自动驾驶解决方案,其中包括车载软件和车载硬件两大模块。
本次介绍的车载硬件方案,是将轻舟智航核心软件研发技术在车辆上实现应用的重要载体。轻舟智航拥有车载软件各个技术栈全自研能力,包括感知算法、地图与定位、决策规划、云端控制等,可保证全面覆盖不同城市场景及不同车型的应用需求。
随着龙舟系列自动驾驶车的规模化落地,车辆将产生海量数据。而能否对这些数据进行自动化收集和使用,是自动驾驶技术实现高效迭代的关键所在。轻舟数据流场便可自动完成 PB 量级的数据收集、筛选、清洗、标注以及仿真评估、大规模仿真场景生成等各步骤,形成完善的一整套流程。
以安全为红线
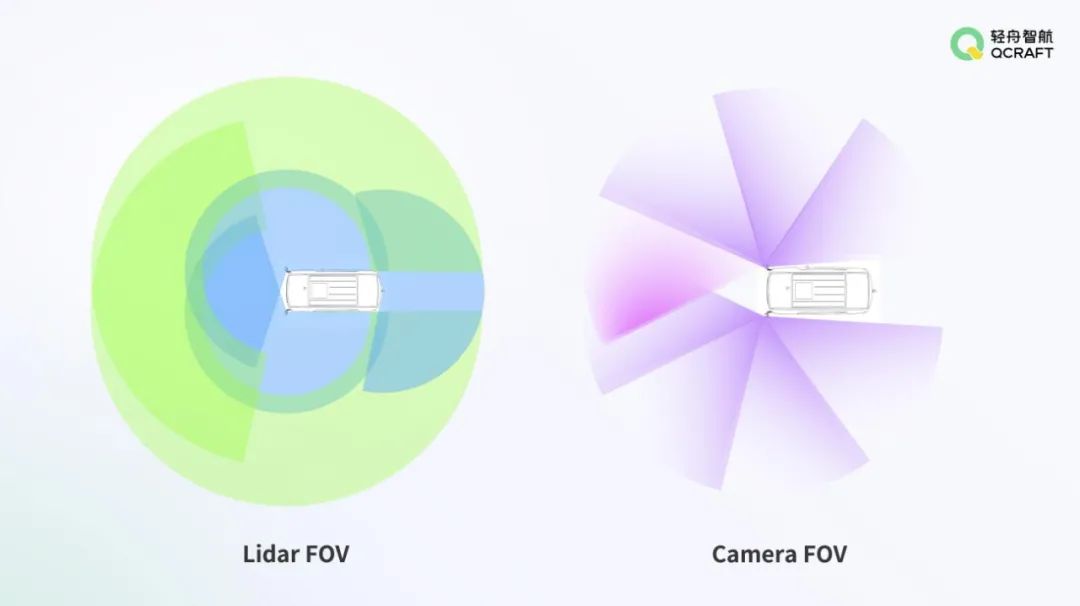
为更稳定地感知外部道路参与者信息,轻舟智航采用多传感器融合的方式构建传感器系统,达到车身周边 360 度无盲区感知效果。多传感器融合套件采用了易于部署的模块化设计,包含 2 个长距离测量激光雷达(主 LiDAR)、3 个近距离补盲激光雷达(盲区 LiDAR)、4 个毫米波雷达、9 个感知摄像头和 1 个 IMU 套装。
![]()
▲ Driven-by-QCraft 第三代自动驾驶硬件方案多传感器融合套件
● 360度无盲区感知:
传统感知方案容易有盲区,对于高速行驶的乘用车、尺寸较高的巴士而言,盲区会带来潜在危险,轻舟智航在中国首创的 360 度无盲区感知方案,可以保证自车周围无死角感知且互为冗余,车辆周边盲点距离车辆距离小于 10cm。
![]()
![]()
●
传感器套件左右互为冗余:
不像手机、电视或者家用电脑,自动驾驶汽车一旦出现故障,便是性命攸关的事。为此,轻舟智航建立了“多重保险”,让传感器套件实现左右互为冗余:基于五个激光雷达,当其中单个或两个雷达失效时,自动驾驶系统依然能保证感知模块正常运转,支撑车辆安全停靠。
![]()
● 高同步性的激光雷达方案:
套件中每一个激光雷达的旋转方向均在同一时刻保持一致,具备高度同步性。当周围有动态物体出现的时候,点云不会出现错位或重影现象,同时保证可将所有激光雷达的点云数据收集在一起集中处理,最大化利用所有信息。
● 摄像头智能适应不同环境:
通过先进的软件算法,系统可处理在不同光线条件下的过曝或欠曝问题,以及在车辆行驶过程中因运动模糊导致的拖影问题,使得车辆在不同光线以及不同运动状态下都具备稳定的感知能力。独特定制设计的专门识别红绿灯的相机可以不受环境光干扰,能够在晚上精准识别出 150 米外的红绿灯形状及颜色。此外,摄像头采用车规级设计,满足汽车级特殊环境,工作温度范围可覆盖 -40 至 125℃。
● 摄像头盲区最小化处理:
7 颗 500 万像素的周视相机采用逆时针旋转 90 度安装形成纵向视图,既保证了相机逐行曝光方向与激光雷达扫描方向的一致性并因此提高了两者的前融合效果,又大大减少了地面盲区。相比传统的安装方式地面盲区面积减少了 90% 以上,保证了周边近距离物体的识别,检测出车辆近处的交通锥、行人等,尤其是较矮的儿童。
● 在室外,气温变化引起的温度差以及下雨天气会使镜头凝结水雾导致画面迷糊,而轻舟的传感器自带清洁功能,能自动进行去污处理,去除水雾、灰尘或其他污垢。
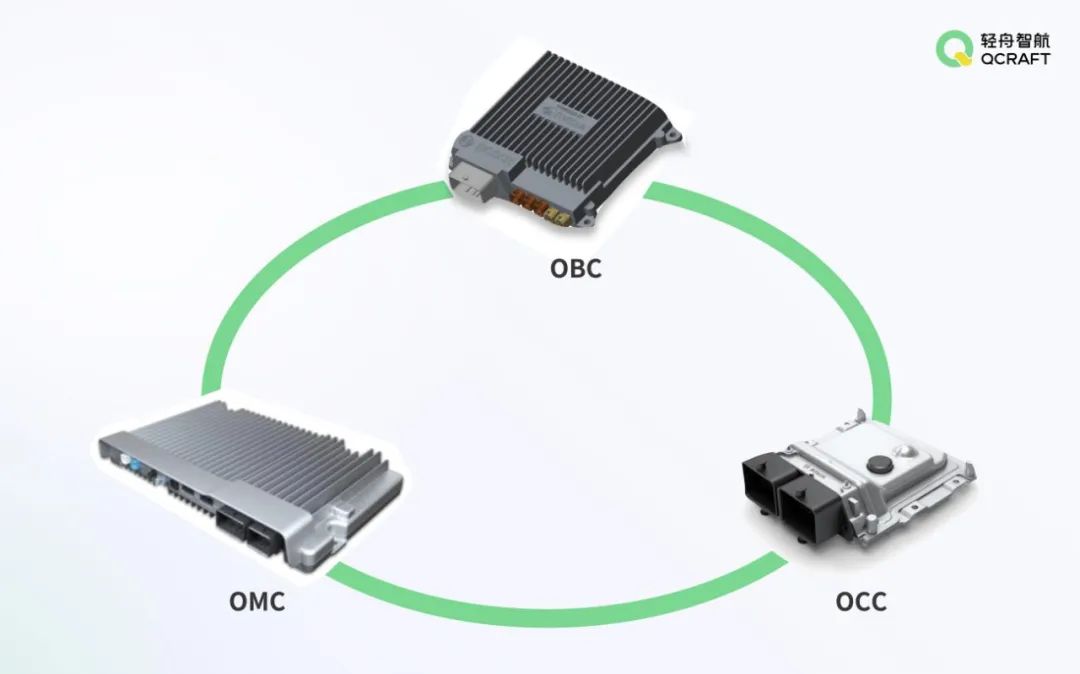
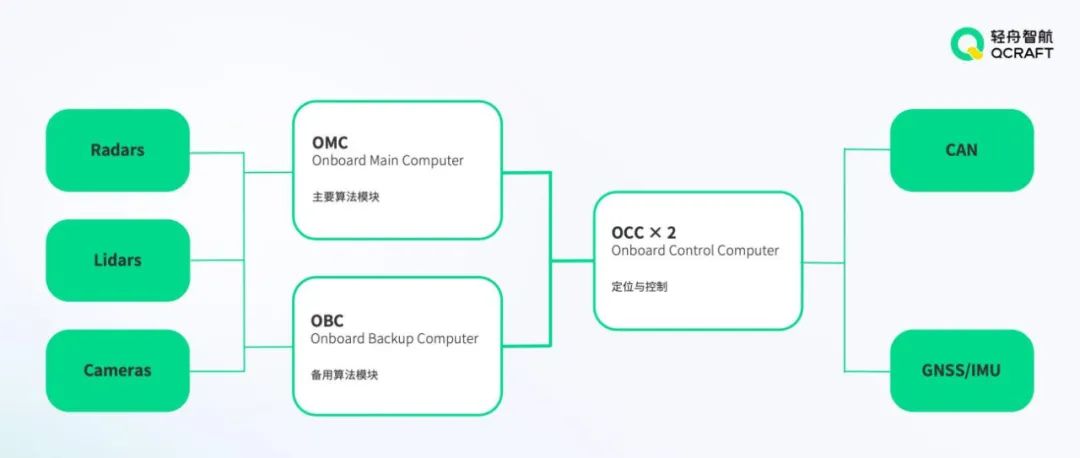
● Driven-by-QCraft
的计算平台包括了主计算单元、备份计算单元、车载计算单元三个层次。
正常情况下,主计算单元负责自动驾驶系统软件功能的运行、计算,在其因为特殊原因发生故障以后,为了确保车辆系统的安全,备份计算单元接收车辆控制,决定车辆下一步的运动行为,这样的
“
大小脑
”
设计让车辆拥有异常情况靠边停车、紧急刹车等保护机制。
![]()
● 通过将功率路径分层管理,可根据不同天气状况、道路条件实时进行电能动态分配,优先支援核心功能模块,调节辅助功能模块供电,延长车辆运营里程;有效识别和隔离系统异常故障单元,避免故障级联,保护核心功能模块在小概率随机故障时不受影响,降低系统的运营维护成本;配合冗余电源和传感器设计,在单一甚至多个核心功能模块意外受损时,依然维持保证车辆行驶安全的最小子系统。
以规模化为目标
● 由轻舟智航推出的这一套硬件可应用于不同车型,也是国内首个可同时用于 Robotaxi 及 Robobus 的硬件方案。从应用于乘用车的传感器套件可以看出,这一造型十分独特,不同于其他 Robotaxi 公司的造型,这一造型除了能保证 360 度无盲区感知,也能实现左右传感器互为冗余。在不同车型、不同城市应用同样的硬件方案,也能保证数据的完整性及共通性,加快推动软件迭代,并通过 OTA 的方式为大规模车队持续升级。
● 硬件方案还可根据场景按需配置,具备很强的适应性。而根据轻舟智航预测,在未来 2-3 年内整套传感器的成本将下降至 5 位数。
在 11 月 9 日举行的英伟达 GTC 大会上,轻舟智航正式宣布牵手英伟达。依靠其计算能力,NVIDIA DRIVE Orin 可以出色地进行海量并发运算,且支持复杂深度神经网络,用以处理自动驾驶系统产生的数据,并做出决策。
NVIDIA DRIVE Orin 满足量产车规级,在系统层面符合 ISO 26262 功能安全 ASIL-D 标准,这对自动驾驶等对安全要求十分严苛的应用场景十分重要。从整体功耗比来说,基于 NVIDIA DRIVE Orin 的各级计算平台可达到的区间是 2-3 TOPS/W,这个效率也将助力L4级自动驾驶车辆的大规模落地。伴随着乘用车高级辅助驾驶功能的量产落地,NVIDIA DRIVE Orin 在价格上占有较大优势,将大幅降低整套自动驾驶方案的成本。
通过第三代自动驾驶硬件方案的探索,轻舟智航正在努力找到自动驾驶车辆安全、成本、规模化之间的平衡点。
![]()
当汽车通过智能化、网联化实现真正的共享化,无人出租车将走向新的业态,为人们提供更宽敞的空间、更绿色共享的出行服务。
实际上,不管 Robobus 还是 Robotaxi,两者未来的发展道路可能是殊途同归。
为探索更具前瞻性的无人出租车,轻舟智航选择从小巴形态入手,大力实现其商业化落地,持续收集应用反馈,打造更广泛适用于共享出行的全新车辆形态。
从量产乘用车自动驾驶,到 Robobus、Robotaxi 再到未来为无人化出行而打造的车型,都有轻舟智航通用性自动驾驶系统的用武之地。目前,这家无人驾驶通用解决方案公司正在这条赛道上不断超车,大力实现商业化落地的同时面向全球招聘精英。轻舟已过万重山,让我们拭目以待。
🔍
现在,在「知乎」也能找到我们了
进入知乎首页搜索「PaperWeekly」
点击「关注」订阅我们的专栏吧
![]()