【深度】综述:面向智能车辆的驾驶员意图推理研究

加拿大滑铁卢大学曹东璞教授团队提出了在基于驾驶员行为分析的基础上,进一步明确驾驶员人脑意图产生机制并建模,从而希望在驾驶员执行具体车辆操作之前获得准确的驾驶意图判断。
研究意义
智能汽车的发展和高级驾驶员辅助系统的普及为车辆安全带来了极大保障,进一步提高了车辆的驾驶安全性和舒适性。然而,随着车辆智能化的发展,智能控制单元与驾驶员越来越多的共享对车辆的底层控制权,智能汽车会难以避免的对驾驶员进行“夺权”,或在重要时刻干扰驾驶员做出有利于驾驶员本身利益的控制策略,进而造成安全隐患。因此,智能汽车不能忽视对车辆最高决策者-驾驶员的理解和感知。现阶段的高级驾驶员辅助系统已经初步具备对驾驶员的行为的监控功能,如预防疲劳驾驶的人眼识别、防止分心的动作识别、以及驾驶员情绪识别。然而,从智能人车共驾角度来看,仅仅检测驾驶员的面部特征和行为仍然难以满足车辆智能驾驶的需求。因此,加拿大滑铁卢大学曹东璞教授团队提出了在基于驾驶员行为分析的基础上,进一步明确驾驶员人脑意图产生机制并建模,从而希望在驾驶员执行具体车辆操作之前获得准确的驾驶意图判断。
驾驶意图的推理能够使驾驶员辅助系统更全面的理解和辅助驾驶员的驾驶任务。以换道意图为例,换道意图预测有助于帮助车辆环境感知系统提早检测驾驶员的感兴趣驾驶区域,实现盲区探测和驾驶预警。同时,还能避免因驾驶员不规范换道操作,如没有开启转向灯而造成的与道路保持系统对车辆控制权的冲突问题。该团队在完善人脑意图认知模型的同时,正将此模型用于高级别无人驾驶车辆的决策与规划问题。通过学习熟练驾驶员的意图产生与决策机制,指导未来无人车辆在相似道路环境下的拟人化决策问题。驾驶员的意图推理也可以促进驾驶员场景认知(situationawareness)研究,通过学习驾驶员的驾驶特性、驾驶知识、车辆交互方法,建立一套更完整驾驶员认知模型。
意图推理划分
精确区分驾驶员意图等级是驾驶意图推理的前提。驾驶员意图可以从多个方面进行分类,如时间尺度,运动方向以及意图预测任务的数量方面。从时间尺度上来说,可分为策略级(Strategical Level), 任务级(Tactical Level), 及操控级(Operational Level),如图1所示。位于顶层的策略级意图是对当前驾驶任务的整体策划,如选择相关的路线、驾驶策略、目的地等。其时间尺度最长,通常在分钟或小时级。任务级驾驶意图是研究的重点,其包含了各种常见的驾驶行为,如换道、转向、制动等。由于道路环境的随机性,这一部分的驾驶意图无法像策略级意图那样精确判断,只能依赖于时序驾驶员行为特征进行反推。这一级别的驾驶意图通常在分钟级或秒级。最底层的操控级意图是任务级意图的具体表现,如驾驶员对车辆的横、纵向控制。操控级的意图比前两级意图更加快速,通常在秒级或毫秒级。每个任务级意图通常由一系列的操控级意图组成。因此,对任务级意图的推断可以通过识别驾驶员相关的操控行为得出。其他的驾驶员意图分类方法还有基于车辆运动方向的横向和纵向意图分类方法、基于意图预测任务,如单一意图与多意图融合的预测方法。
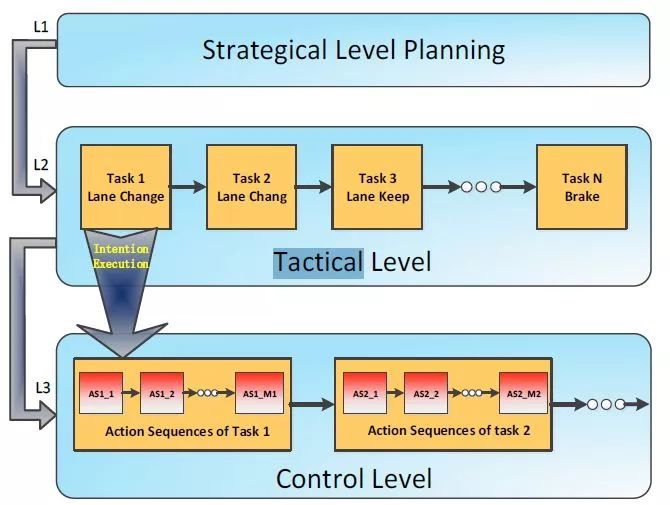
图1. 驾驶员意图时间尺度分类
意图推理方法
驾驶员意图推理的方法主要集中于机器学习的建模方式,如生成式模型(隐马尔可夫模型、动态贝叶斯网络)和判别式模型(支持向量机、前馈神经网络、决策树)等。判别式模型多采用非时序特征数据作为模型输入并将模型等价为分类网络进行驾驶意图判断。以隐马尔科夫模型为例的生成式模型允许短期时序数据进行建模。然而由于模型体积和深度因素,通常难以捕捉长期时序数据的动态特性,模型的预测能力和精度较低。根据UCSD Trivedi团队发现,相对于判别式模型,生成式模型对多意图推理的任务更为有效。近年来,随着深度学习技术的发展,时序深度神经网络也逐步被用于驾驶员或智能车辆的决策与规划。深度循环神经网络作为目前主流的时序神经网络也被用于驾驶员的意图推理。结合长短期记忆网络,深度循环神经网络具备更深的网络结构,可以保存更长时间的驾驶员行为特征,有利于获取长期序列驾驶行为间的依赖关系,建立更加精确的意图推理模型。
除基于学习的方法外,Drexel University的D. Salvucci等人也从认知心理学角度出发开发了基于数学模型的认知过程表征方法,可以较为明确的解释部分意图产生的机制和机理,然而,基于明确数学模型的方法难以有效利用驾驶员行为数据,无法充分考虑如驾驶风格、分心或疲劳等其他精神层面因素对驾驶意图的影响。同时,目前智能车辆动辄可具备上百个传感器,基于数学的表征方法难以充分利用时序车辆动态特性对驾驶意图进行精确预测。常见的驾驶意图建模方法如图2所示。
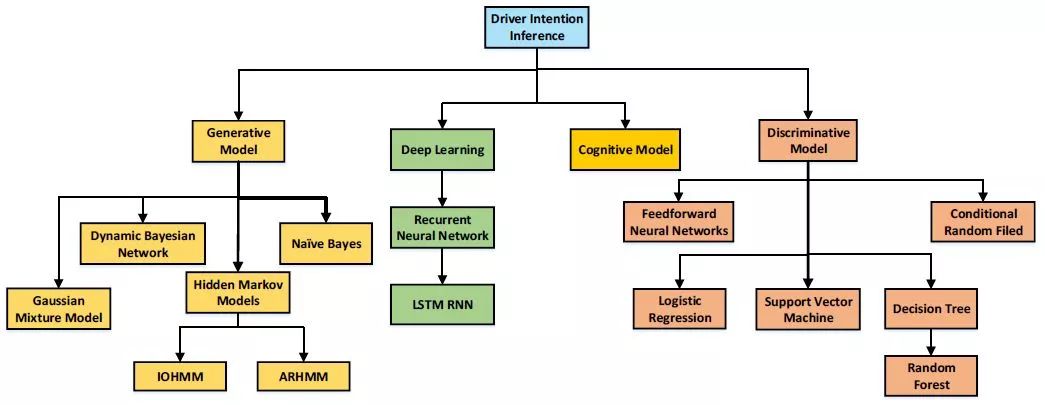
图2. 驾驶员意图建模方法分类
意图推理评价指标
意图推理的评价指标可以从精确度和超前性两方面进行判断。以换道意图为例,根据驾驶员的换道行为可以将换道意图简单分为直线保持、左换道和右换道。通过监督学习使模型产生相应的预测结果,结合接受者操作特征(ROC)曲线等分类精度判别方法可以测量驾驶意图的预测精度。超前性的评价相对复杂,以图3所示的换道重要时刻为例,T1时刻代表驾驶员产生换道意图,由于隐性换道意图的不可测性,难以精确测量具体的意图产生时刻。T2时刻代表驾驶员开始执行换道操作并在T3时刻车辆跨越当前车道的车道线,最终在T4时刻完成完整的换道行为。因此,换道意图推理的目的是在T3时刻之前判断出车辆换道行为。更严格地,需要在T2时刻驾驶员开始执行换道操作之前预测出当前的驾驶意图。随着观测时间的缩短,意图推理难度也不断增大。
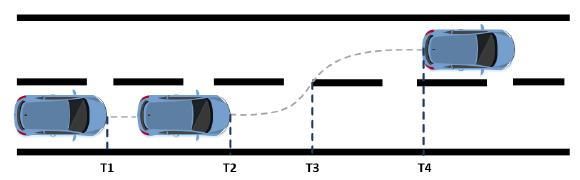
图3. 换道过程重要时刻
展望
目前针对驾驶员意图的研究主要集中在单一的意图推理方法研究上,其通常需要假设驾驶员会完成换道动作并在模型建立过程中只采用成功的换道数据。这在复杂的交通场景下通常难以获得满意的预测精度。同时,尚没有建立驾驶员意图与其他驾驶员状态间的关系,如不同注意程度或疲劳程度可以产生不同的驾驶行为。未来需要全面结合驾驶员状态分析和行车环境分析数据,建立强鲁棒的驾驶员状态自适应模型以精确预测驾驶意图。
相关研究成果已发表在IEEE Transactions on Vehicular Technology汇刊:Yang Xing, Chen Lv, Huaji Wang, Hong Wang, Yunfeng Ai, Dongpu Cao, Efstathios Velenis, Fei-Yue, Wang. (2019) Driver Lane Change Intention Inference for Intelligent Vehicles: Framework, Survey, and Challenges. IEEE Transactions on Vehicular Technology. 14 pages. (Early Access)

来源:智车科技
往期文章推荐

🔗【重要通知】关于开展2019年度中国自动化学会会士候选人提名工作的通知
🔗【重要通知】关于2019年度CAA科学技术奖励推荐工作的通知
🔗【征文通知】关于2019首届中国机器人大会暨2019国家机器人发展论坛的通知
🔗【重要通知】关于开展第五届中国自动化学会青年科学家奖推荐工作的通知
🔗【重要通知】2019国家机器人发展论坛暨Robocup机器人世界杯中国赛展览与赞助通知
🔗【重要通知】关于2019年度CAA高等教育教学成果奖推荐工作的通知
🔗【重要通知】关于面向各分支机构、期刊编辑部征集2019中国自动化大会专题研讨会(Workshop)的预通知
🔗【重要通知】关于开展2019年CAA优秀博士学位论文奖励及推荐工作的通知
🔗【重要通知】关于召开2019国家机器人发展论坛暨Robocup机器人世界杯中国赛、2019年中国自动化产业年会的通知
🔗【CAA】中国自动化学会选举产生第十一届理事会领导机构(内附名单)