特斯拉AI高管都推荐的张量工具,开源了三年后终于中顶会了! | ICLR 2022 Oral
博雯 发自 凹非寺
量子位 | 公众号 QbitAI
那个在GitHub标星4.3k的张量操作工具Einops,在开源三年后终于中了顶会!
这是一个统一的、通用的操作张量结构的方法,基于爱因斯坦求和约定(Einstein summation convention)的思路开发,能够大幅提高代码的可读性和易修改性。
同时,Einops支持Pytorch、TensorFlow、Chainer、Jax、Gluon等多个深度学习框架,以及Numpy、Cupy等张量计算框架。
ICLR 2022将其接收为Oral论文的消息一出,无数白嫖多年的“精神股东”们纷纷奔走相告,认为Einops确实“当之无愧”:
不过,这一早就声名在外,还有无数大牛站台的工具,在投往顶会后却并非一帆风顺。
比爱因斯坦求和约定更好用的标记法
我们先来了解一下Einops的基本原理。
它的设计思路来自于爱因斯坦在1916年提出的爱因斯坦求和约定,也叫爱因斯坦标记法(Einstein notation)。
这一方法的规定是:当一组乘积中,有两个变量的脚标一样,就要对相同的两个脚标求和。例如下图中的aibi:
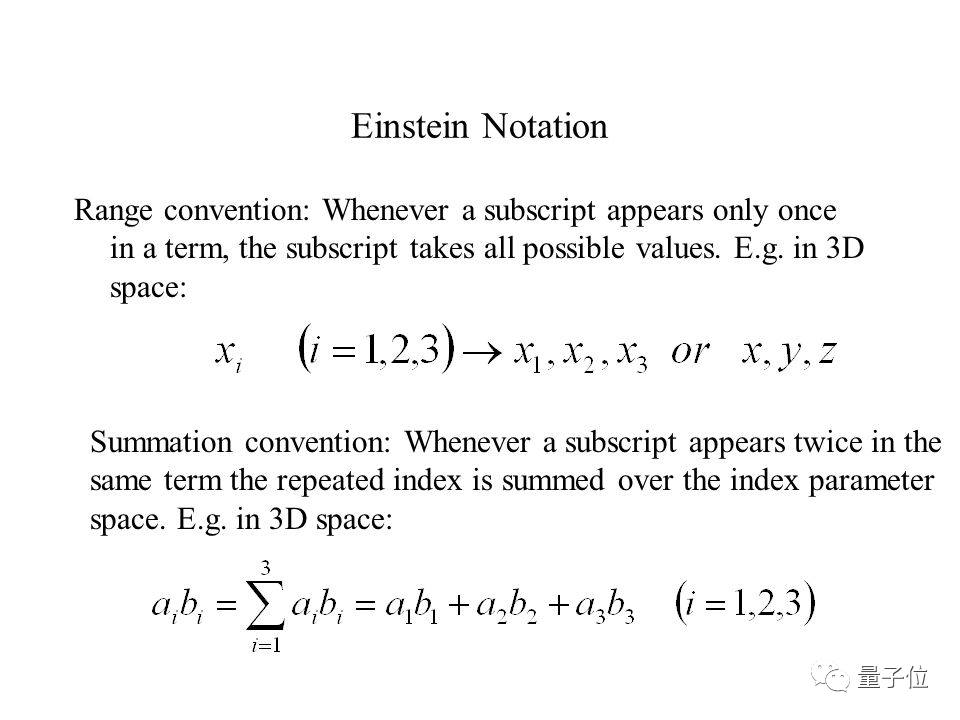
这样书写的好处是,避免公式里出现大量的求和符号,看起来更简洁。
Numpy里的Einsum就是一种模仿爱因斯坦求和约定的方法,可以说,这种思路已经被广泛使用。
而Einops正是基于Einsum进行了诸多改进,针对张量操作过程中一些以前难以解决的问题,提供了更加便利的方案。
比如,当仅通过Pytorch,以及结合Einops两种方法来实现超分辨率(Super-resolution)时,后者无疑极大降低了代码冗余:
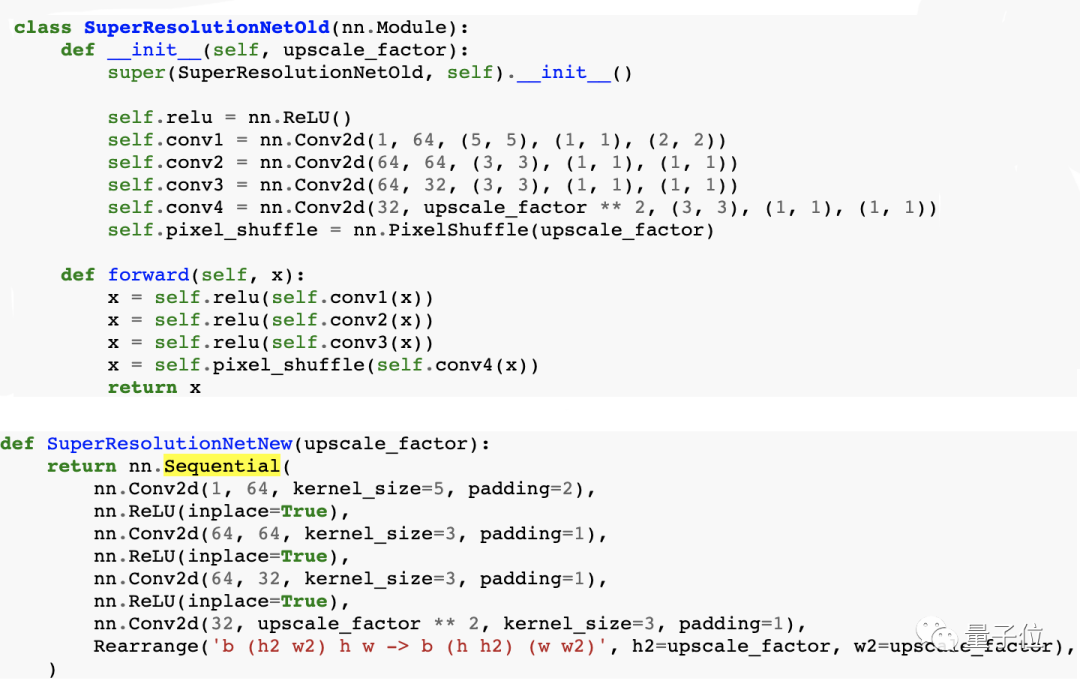
可以看到,结合了Einops之后的代码不需要特殊指令PixelShuffle,并且,还使用了模块调用nn.ReLU以及nn.Sequential。
最后得到的输出结果既不包含虚假坐标,还能在框架之间进行转移。
为什么Einops能做到这些?
这得益于Einops的本质:这是一种针对变换模式的新的标记法,能够确保元素在张量中的位置与坐标变量的值一对一映射。
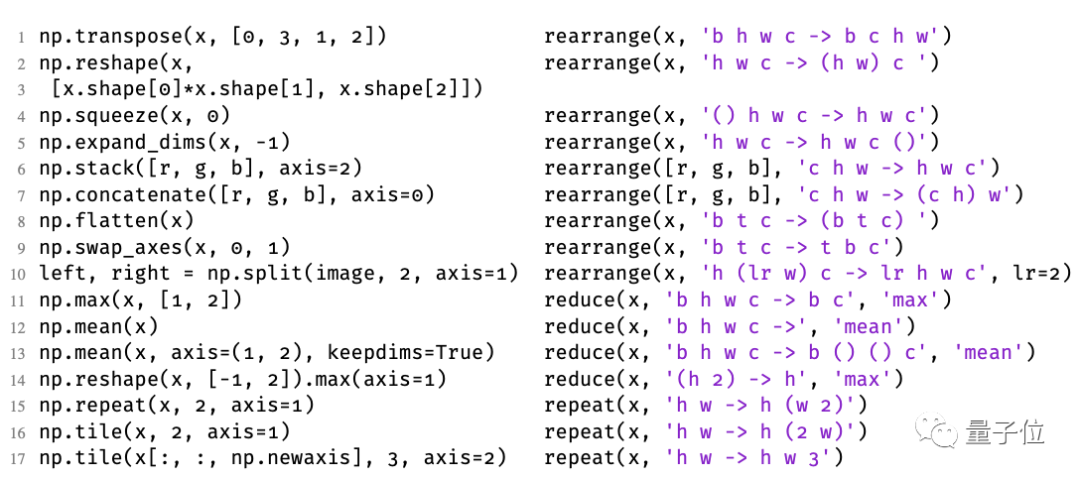
△Numpy和Einops操作之间的对应关系
对比爱因斯坦求和约定(Einsum),Einops有几个额外的特征:
减少仅存在于输入中的坐标(例如可以使用max-reduction法)
重复仅存在于输出中的坐标(张量值对于新坐标的索引都是一样的)
使表达式两边的所有坐标的标记唯一(Einsum允许重复)
在这些特征中,输入和输出被描述为张量的维度和坐标的预期顺序,这使得基于Einops的代码的可读性和易修改性非常高,用户也不需要在每次操作后记住或推断出张量的形状。
同时,Einops将输入坐标(或其组成)与输出坐标连接起来,这也使得张量结构在设计上就无法被破坏。
用括号表示的坐标的组成和分解也是Einops的一个主要创新之处:

通过上述的特点,Einops模式有利于更加灵活地处理高维度数据。
比如,一个注意力机制函数接受了一个形状为[batch,seq,channel]的张量k q v,Einops可以将其高度、宽度和深度合成为一个维度。
同时,张量的头部和batch维度也能够被分组,这就保证了注意力头部的独立处理,从而将其变为三维数据的多头注意力:

类似的,通过修改输入和输出的结构,其他神经块也能够在Einops模式下完成“升级”。
论文接收并非一帆风顺
Einops的作者是来自俄罗斯的Alex Rogozhnikov,他拥有莫斯科大学的数学和物理学博士学位,目前的主要研究领域是机器学习。

而Einops正是他最火热的一项开发,不仅在GitHub上收获4.3k星,还有特斯拉AI高管、FAIR实验室工程师站台:

但是,当作者将其整理成论文并投稿顶会时,有不少审稿人认为这篇论文“读起来像是一篇技术博客”、“创新性不够”、“缺乏严谨性”,并给出了3分(拒绝)的意见:
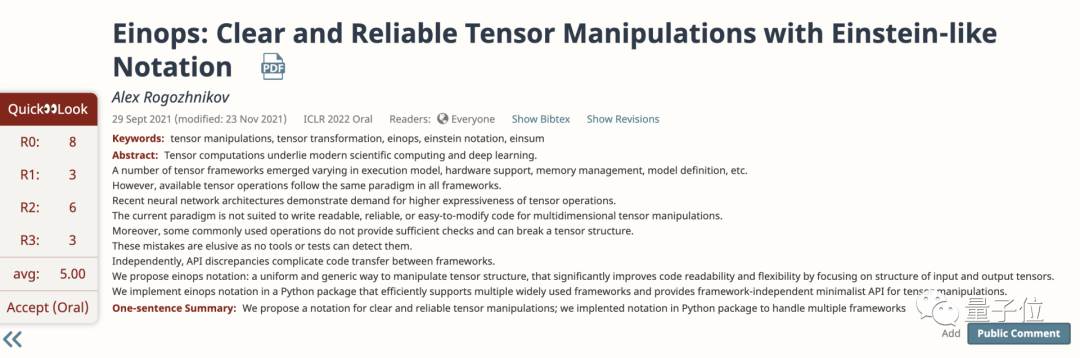
不过,会议主席最终给出了一锤定音的正面评价,并同意将其接收为Oral论文。
比起将几个模块共同训练、压缩、结合,最后在某个任意基准上的SOTA增加0.31 +/-1.04,这篇论文所描述的技术对于ICLR读者来说更重要。
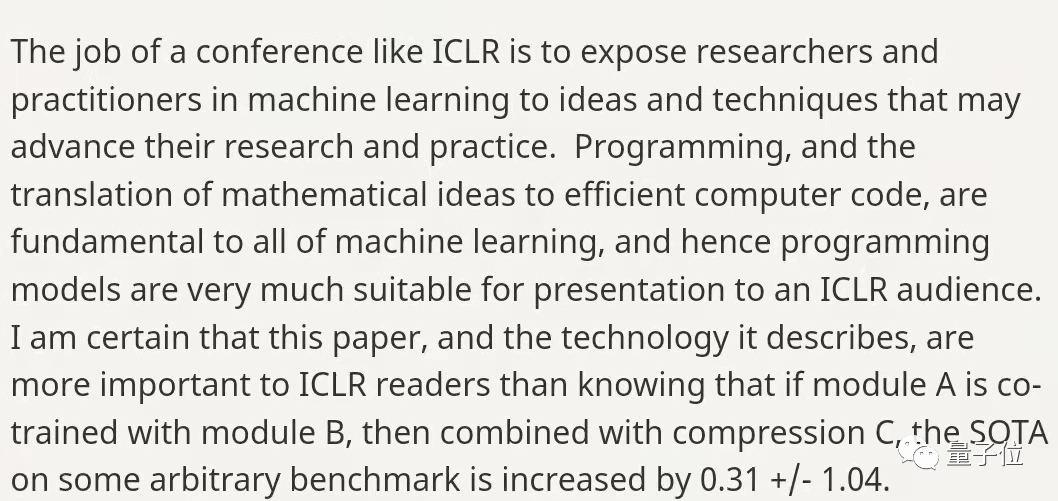
有Einops的使用者专门将会议主席最后的评价贴了出来,并表示:
除了新颖的技术和SOTA之外,其他的很多论文也同样具有价值。
而不管这篇论文有何更广泛的鼓励意义,至少对于开发者Alex Rogozhnikov本人来说,也算是修成正果了。
论文:
https://openreview.net/forum?id=oapKSVM2bcj
GitHub链接:
https://github.com/arogozhnikov/Einops
作者主页:
http://arogozhnikov.github.io/about/
— 完 —
「智能汽车」交流群招募中!
欢迎关注智能汽车、自动驾驶的小伙伴们加入社群,与行业大咖交流、切磋,不错过智能汽车行业发展&技术进展。
ps.加好友请务必备注您的姓名-公司-职位哦~

点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
科技前沿进展日日相见~