一文详解bundle adjustment
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文转自3D视觉工坊
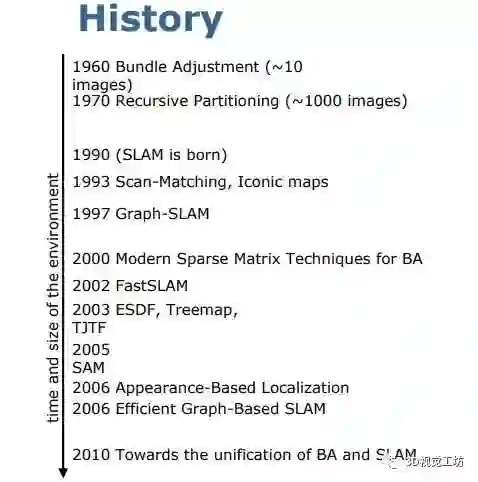
bundle adjustment 的历史发展
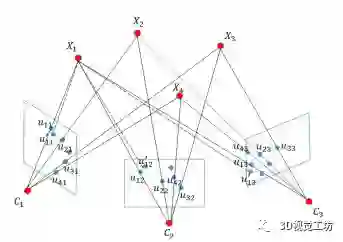
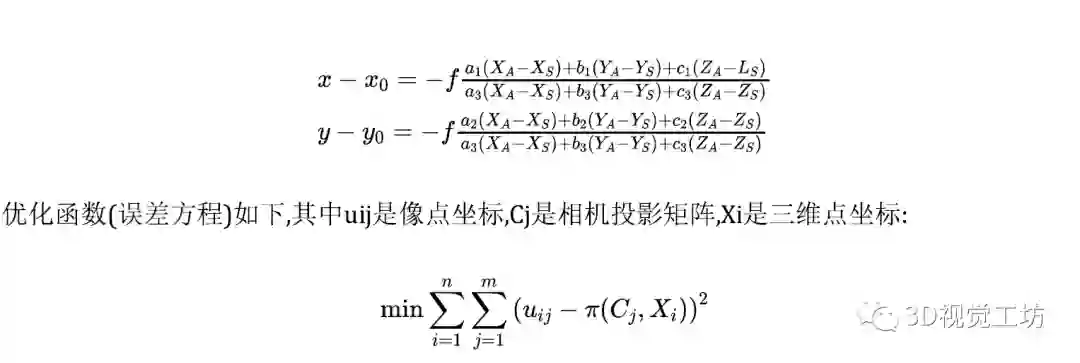
Bundle adjustment 的算法理论
四种Bundle adjustment 算法代码
-
优化相机内参及畸变系数,相机的pose(6dof)和landmark 代价函数写法如下:
template <typename CameraModel>
class BundleAdjustmentCostFunction {
public:
explicit BundleAdjustmentCostFunction(const Eigen::Vector2d& point2D)
: observed_x_(point2D(0)), observed_y_(point2D(1)) {}
//构造函数传入的是观测值
static ceres::CostFunction* Create(const Eigen::Vector2d& point2D) {
return (new ceres::AutoDiffCostFunction<
BundleAdjustmentCostFunction<CameraModel>, 2, 4, 3, 3,
CameraModel::kNumParams>(
new BundleAdjustmentCostFunction(point2D)));
}
//优化量:2代表误差方程个数;4代表pose中的姿态信息,用四元数表示;3代表pose中的位置信息;3代表landmark
自由度;CameraModel::kNumParams是相机内参和畸变系数,其取决于相机模型是what
// opertator 重载函数的参数即是待优化的量
template <typename T>
bool operator()(const T* const qvec, const T* const tvec,
const T* const point3D, const T* const camera_params,
T* residuals) const {
// Rotate and translate.
T projection[3];
ceres::UnitQuaternionRotatePoint(qvec, point3D, projection);
projection[0] += tvec[0];
projection[1] += tvec[1];
projection[2] += tvec[2];
// Project to image plane.
projection[0] /= projection[2];
projection[1] /= projection[2];
// Distort and transform to pixel space.
CameraModel::WorldToImage(camera_params, projection[0], projection[1],
&residuals[0], &residuals[1]);
// Re-projection error.
residuals[0] -= T(observed_x_);
residuals[1] -= T(observed_y_);
return true;
}
private:
const double observed_x_;
const double observed_y_;
};
ceres::Problem problem;
ceres::CostFunction* cost_function = nullptr;
ceres::LossFunction * p_LossFunction =
ceres_options_.bUse_loss_function_ ?
new ceres::HuberLoss(Square(4.0))
: nullptr; // 关于为何使用损失函数,因为现实中并不是所有观测过程中的噪声都服从
//gaussian noise的(或者可以说几乎没有),
//遇到有outlier的情况,这些方法非常容易挂掉,
//这时候就得用到robust statistics里面的
//robust cost(*cost也可以叫做loss, 统计学那边喜欢叫risk) function了,
//比较常用的有huber, cauchy等等。
cost_function = BundleAdjustmentCostFunction<CameraModel>::Create(point2D.XY());
//将优化量加入残差块
problem_->AddResidualBlock(cost_function, p_LossFunction, qvec_data,
tvec_data, point3D.XYZ().data(),
camera_params_data);
-
优化相机内参及畸变系数,pose subset parameterization(pose 信息部分参数优化)和3D landmark,当 只优化姿态信息时候,problem需要添加的代码如下:
//这里姿态又用欧拉角表示
map_poses[indexPose] = {angleAxis[0], angleAxis[1], angleAxis[2], t(0), t(1), t(2)};
double * parameter_block = &map_poses.at(indexPose)[0];
problem.AddParameterBlock(parameter_block, 6);
std::vector<int> vec_constant_extrinsic;
vec_constant_extrinsic.insert(vec_constant_extrinsic.end(), {3,4,5});
if (!vec_constant_extrinsic.empty())
{
// 主要用到ceres的SubsetParameterization函数
ceres::SubsetParameterization *subset_parameterization =
new ceres::SubsetParameterization(6, vec_constant_extrinsic);
problem.SetParameterization(parameter_block, subset_parameterization);
}
-
优化相机内参及畸变系数,pose subset parameterization(pose 信息部分参数优化)和3D landmark,当 只优化位置信息时候,problem需要添加的代码如下(同上面代码,只需修改一行):
//这里姿态又用欧拉角表示
map_poses[indexPose] = {angleAxis[0], angleAxis[1], angleAxis[2], t(0), t(1), t(2)};
double * parameter_block = &map_poses.at(indexPose)[0];
problem.AddParameterBlock(parameter_block, 6);
std::vector<int> vec_constant_extrinsic;
vec_constant_extrinsic.insert(vec_constant_extrinsic.end(), {1,2,3});
if (!vec_constant_extrinsic.empty())
{
ceres::SubsetParameterization *subset_parameterization =
new ceres::SubsetParameterization(6, vec_constant_extrinsic);
problem.SetParameterization(parameter_block, subset_parameterization);
}
-
优化相机内参及畸变系数,pose 是常量不优化 和3D landmark. 代价函数写法如下:
//相机模型
template <typename CameraModel>
class BundleAdjustmentConstantPoseCostFunction {
public:
BundleAdjustmentConstantPoseCostFunction(const Eigen::Vector4d& qvec,
const Eigen::Vector3d& tvec,
const Eigen::Vector2d& point2D)
: qw_(qvec(0)),
qx_(qvec(1)),
qy_(qvec(2)),
qz_(qvec(3)),
tx_(tvec(0)),
ty_(tvec(1)),
tz_(tvec(2)),
observed_x_(point2D(0)),
observed_y_(point2D(1)) {}
static ceres::CostFunction* Create(const Eigen::Vector4d& qvec,
const Eigen::Vector3d& tvec,
const Eigen::Vector2d& point2D) {
return (new ceres::AutoDiffCostFunction<
BundleAdjustmentConstantPoseCostFunction<CameraModel>, 2, 3,
CameraModel::kNumParams>(
new BundleAdjustmentConstantPoseCostFunction(qvec, tvec, point2D)));
}
template <typename T>
bool operator()(const T* const point3D, const T* const camera_params,
T* residuals) const {
const T qvec[4] = {T(qw_), T(qx_), T(qy_), T(qz_)};
// Rotate and translate.
T projection[3];
ceres::UnitQuaternionRotatePoint(qvec, point3D, projection);
projection[0] += T(tx_);
projection[1] += T(ty_);
projection[2] += T(tz_);
// Project to image plane.
projection[0] /= projection[2];
projection[1] /= projection[2];
// Distort and transform to pixel space.
CameraModel::WorldToImage(camera_params, projection[0], projection[1],
&residuals[0], &residuals[1]);
// Re-projection error.
residuals[0] -= T(observed_x_);
residuals[1] -= T(observed_y_);
return true;
}
private:
const double qw_;
const double qx_;
const double qy_;
const double qz_;
const double tx_;
const double ty_;
const double tz_;
const double observed_x_;
const double observed_y_;
};
ceres::Problem problem;
ceres::CostFunction* cost_function = nullptr;
ceres::LossFunction * p_LossFunction =
ceres_options_.bUse_loss_function_ ?
new ceres::HuberLoss(Square(4.0))
: nullptr; // 关于为何使用损失函数,因为现实中并不是所有观测过程中的噪声都服从
//gaussian noise的(或者可以说几乎没有),
//遇到有outlier的情况,这些方法非常容易挂掉,
//这时候就得用到robust statistics里面的
//robust cost(*cost也可以叫做loss, 统计学那边喜欢叫risk) function了,
//比较常用的有huber, cauchy等等。
cost_function = BundleAdjustmentConstantPoseCostFunction<CameraModel>::Create( \
image.Qvec(), image.Tvec(), point2D.XY());//观测值输入
//将优化量加入残差块
problem_->AddResidualBlock(cost_function, loss_function, \
point3D.XYZ().data(), camera_params_data);//被优化量加入残差-3D点和相机内参
参考资料
-
colmap openmvg 源代码,github 地址: https://github.com/openMVG/openMVG https://github.com/colmap/colmap -
单杰. 光束法平差简史与概要. 武汉大学学报·信息科学版, 2018, 43(12): 1797-1810.
从0到1学习SLAM,戳↓
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓

登录查看更多
相关内容




相关VIP内容
相关资讯
相关论文