基于车道驾驶态势的拓扑构建与路径规划 | 厚势汽车

厚势按:本文首先分析了国内外高精度地图车道模型的研究现状,针对车道模型在自动驾驶中的融合应用,提出了一种基于车道驾驶态势的拓扑构建和路径规划方法。车道驾驶态势是指在遵循正确交通规则的前提下驾驶车辆通过车道后将达到的空间方位和通行状态。
利用车道驾驶态势可生成车道级可通行区间集合,并构建可通行区间之间的拓扑关系,再利用 Dijkstra 算法可进行最优路径规划。可通行区间内部通过驶入和驶出接口点列表达可任意变道的拓扑关系,快速完成车道级路径规划,为自动驾驶多源数据融合与二次规划提供基础参考。
本文来自 2018 年 5 月 24 日出版的《 地理空间信息 》,作者是上海汽车集团股份有限公司高工祖似杰、武汉中海庭数据技术有限公司 CTO 罗跃军和武汉光庭信息技术股份有限公司张攀。
在智能交通和自动驾驶领域,由于精度、内容和完整性方面的缺失,现有的商用导航地图已不能满足高层次的运用需求 [1]。对高精度地图的需求已得到广泛的认同和接受 [2],如在 Google 和 Daimler [3] 的自动驾驶汽车中,地图都是重要的组成部分。准确和全面的环境感知是自动驾驶的基础,地图对道路几何形状和交通属性的描述可为自动驾驶提供准确的先验信息。自动驾驶感知系统通过传感器数据与地图数据的匹配融合,实现对周围环境的感知;规划和控制系统则基于感知结果进行规划和控制。
车道是高精度地图最重要的数据内容,车道模型的优劣将直接影响高精度地图的应用效率。LIU L M [4] 等提出了包含道路、车道、车道标线的详细道路交通环境 Smart Map。该地图数据包含全局几何拓扑网络和车道级几何拓扑网络,分别用于完成宏观的路径规划和在路口区域的车道级微观路径规划。与 GPS 导航系统规划的路径相比,Smart Map 规划的路径更加平滑、安全。
2011 年 Grand Cooperative Driving Challenge 大赛中,获奖团队 AnnieWay 使用 2D 平面模型对道路进行建模,以 0.5 m 的间隔将高精度的道路中心线数据单独分段,并通过 2D kd-tree 对道路数据进行管理,实现高效的邻域搜索;相应地,车道表达为相对于道路中心线的横向偏移 [5]。Bétaille D [6] 等提出了增强地图,采用直线、圆、回旋曲线来表达道路的几何信息,该方法保证了道路几何的完整性和精确性,同时地图中也包含了车道间的拓扑连接关系。
动态地图是日本 SIP-adus [7] 计划的重要组成部分,其实质是一种含有各类动态信息的高精度地图,主要包括 link 级、lane 级、道路形状级 [8] 3 个层次。其中,link 级网络即道路级几何拓扑网络,主要用于传统导航、大范围路径探索;lane 级网络即车道级几何拓扑网络,该层数据详细表达了每个车道的信息,主要面向智能交通领域的辅助驾驶和自动驾驶。
国内外自动驾驶研究机构从不同角度设计了高精度地图车道模型,但大多停留在概念和试验阶段,还没有形成成熟稳定的模型和应用体系;虽然都表达了车道的几何形状与拓扑关系,但大多只能独立提供感知信息,难以与其他传感器数据融合,不能发挥高精度地图时空参考平台的作用。
针对上述问题,本文探讨了一种基于车道驾驶态势的高精度地图车道数据组织方式,并构建了车道拓扑关系,进行了路径规划实践。其结果可作为自动驾驶多源传感数据融合的基础,对高精度地图在自动驾驶中的应用突破具有重要意义。
1. 车道驾驶态势
车道驾驶态势是指在遵循正确交通规则的条件下,驾驶车辆通过车道后将达到的空间方位和通行状态,即驾驶车辆通过该车道段后可明确直行、左转或右转,以及发生上述驾驶行为后的延展信息,如右转后将达到另外一条道路。道路上的车道分隔线和地面印刷标识可作为判定车道驾驶态势的重要依据,如路口的驶入路口车道地面一般印刷了通行方向箭头,且车道分隔线呈虚实变化,实线分隔表明不再允许横向变道,该车道的驾驶态势锁定。
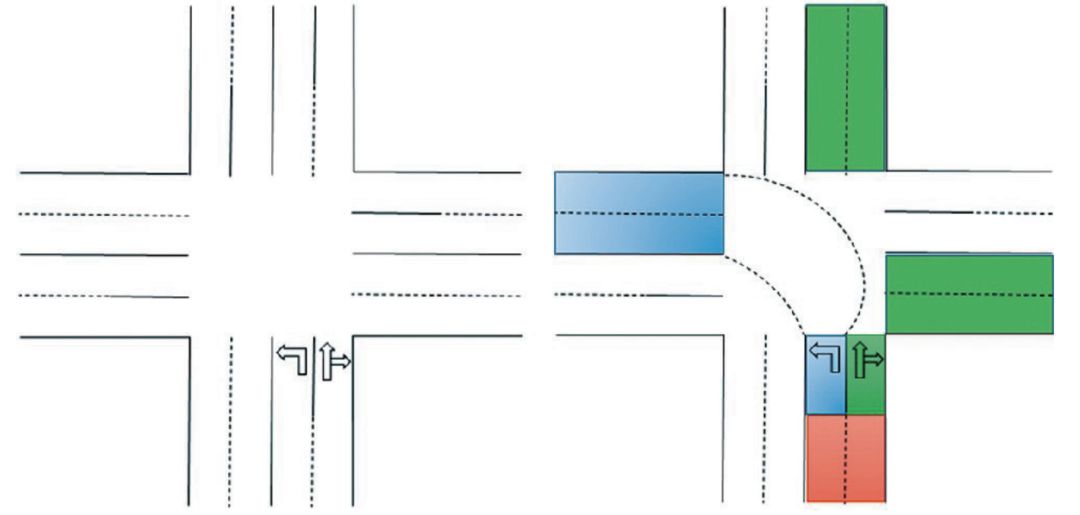
图 1 路口车道驾驶态势
如图 1 所示,根据地面箭头标识,下方道路驶入路口的左车道只能左转,右车道可以直行和右转,虽在同一条道路,但两个车道的驾驶态势已完全不同。车道驾驶态势变化的临界线可根据车道分隔线、经验值、车辆长度和车辆动力学特性等多因素综合考虑进行划分,图 1 中根据车道分隔线虚实变化进行了划分,虚线部分(红色部分)两条车道的驾驶态势一致,可直行也可相互变道,而到达实线部分,两条车道的驾驶态势则变得不同。
2. 基于车道驾驶态势的拓扑构建
获得车道驾驶态势和划分变化临界线后,可生成车道级的可通行区间,即 lanezone。在 lanezone 内部允许车辆直行或左右变道,且保持横向水平,即 lanezone 内部车道的驾驶态势相同。如图 2 所示,左侧是常见分叉路,其中分叉路的最右侧车道一般采用实线分隔车道,若要右转则需提前变道以保障安全驾驶。根据每段车道的驾驶态势,划分出 6 个 lanezone。
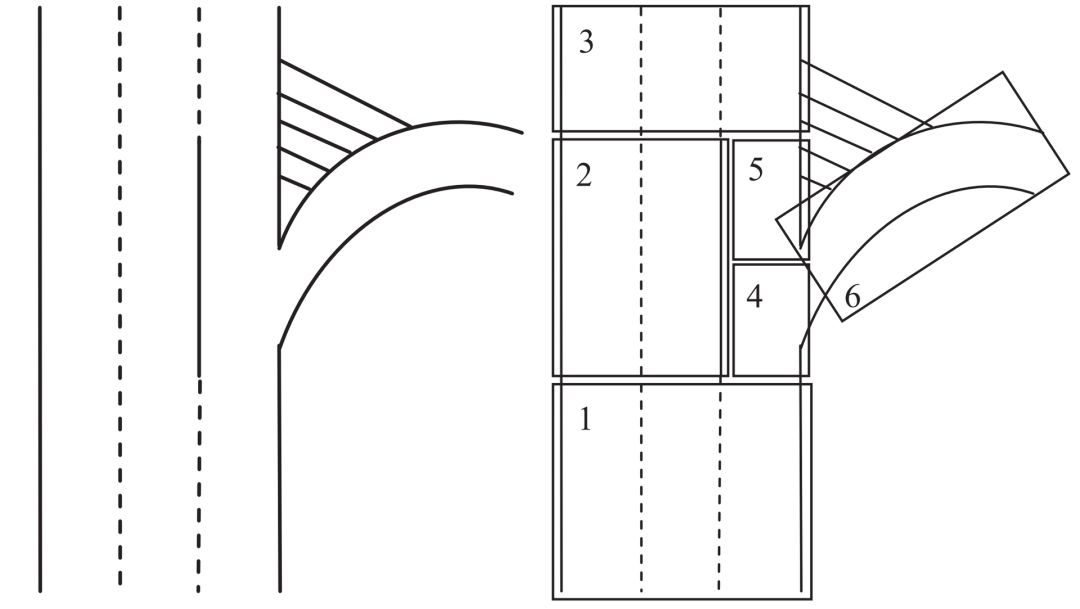
图 2 基于车道驾驶态势的拓扑构建
2014 年 Bender P [9] 等提出了可驾驶的车道区间概念 lanelet。Lanelets 地图包括 lanelet、规则元素和驾驶走廊 3 个元素:
lanelet 是可驾驶的车道区间,由左右边界构成,是 lanelets 地图的最小单元;
规则元素是关联在 lanelet 上的交通规则信息,如交通信号灯、交通标志、路口交通规则等,由规则信息和为遵循该规则所需要的参数两方面构成,如在交通信号灯前,规则信息为「遇红灯停止」,相应的参数为交通信号灯的位置和停止线位置;
驾驶走廊是有序的、接续的 lanelet 序列,是到达目的地的具体驾驶路径。
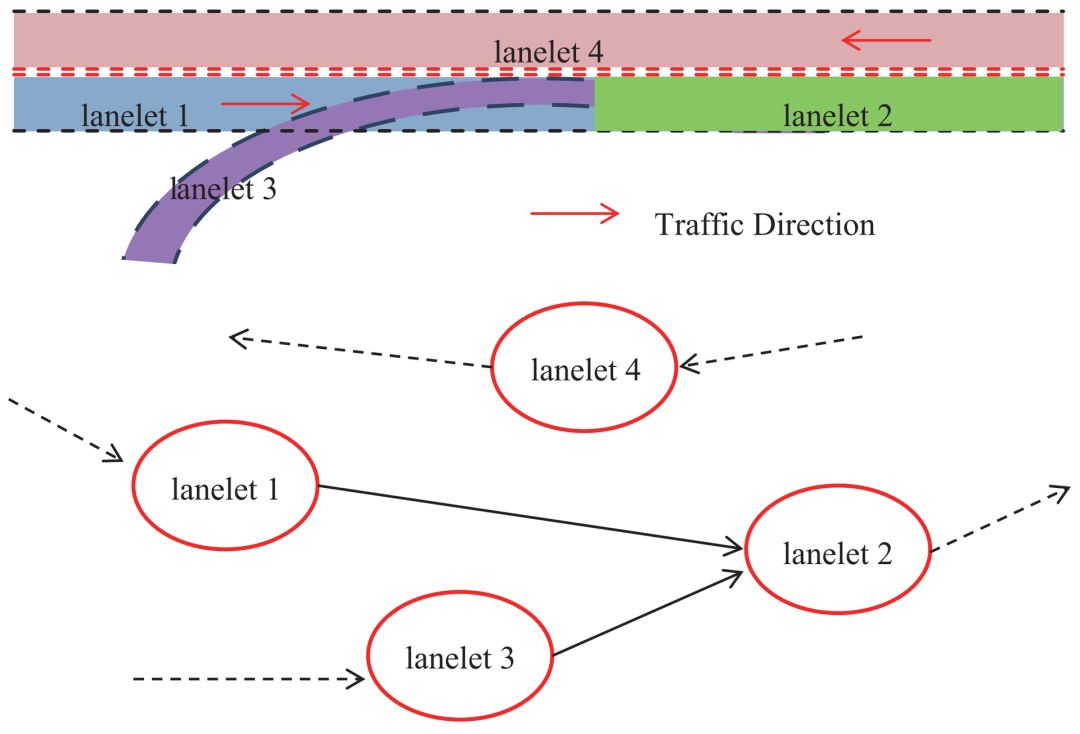
图 3 lanelet 车道模型
在 lanelets 地图中,车道级拓扑网络通过 lanelet 间的连接关系来构建,如图 3 所示。lanelets 地图为奔驰 S500 智能汽车感知、规划、决策系统提供数据支持,完成了奔驰超过 100 km 的完全自动驾驶实验。
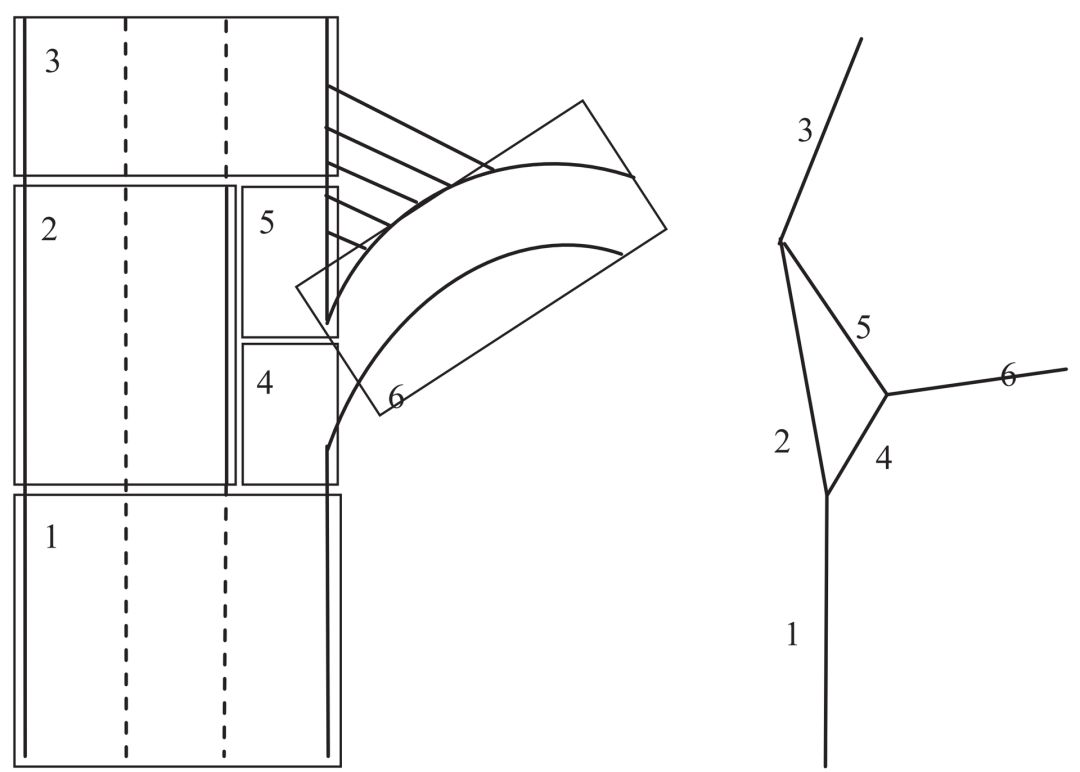
图 4 lanezone 之间拓扑关系构建
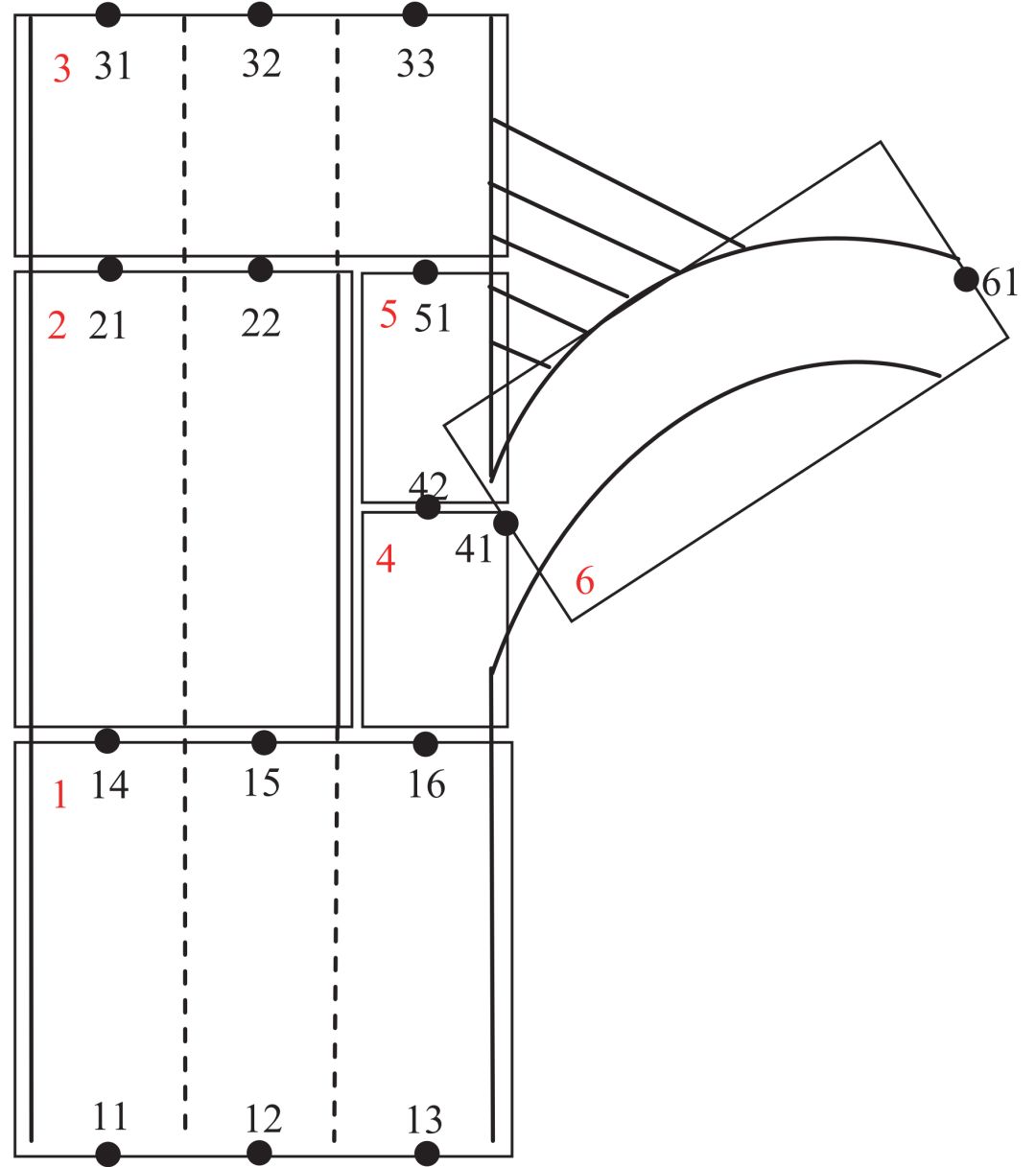
图 5 lanezone 内部拓扑关系构建
本文提出的 lanezone 概念与 Lanelet 有所不同,它注重保持可通行区间的横向水平,而不是只基于单车道构建可通行区间:
Lanezone 首先基于车道驾驶态势构建道路横向上的全部可通行区间,更有利于多传感器数据融合以及实际路况下多车协同的自动驾驶感知和认知;
然后构建可通行区间之间的拓扑关系,以表达车辆是否被允许从一个可通行区间到另一个可通行区间,如图 4 左侧 lanezone 之间拓扑关系,可被提取为右侧的拓扑网,拓扑网的边长可设定为该 lanezone 的道路长度,作为通行代价的距离因子参与路径规划;
最后构建可通行区间内部的拓扑关系,可通行区间内部车道驾驶态势相同,可自由变道,所以只需记录驶入车道拓扑点列 ZoneIn 和驶出车道拓扑点列 ZoneOut,如图 5 所示,标识出 lanezone 每条车道的起始中心点,以表征该车道的拓扑关系。
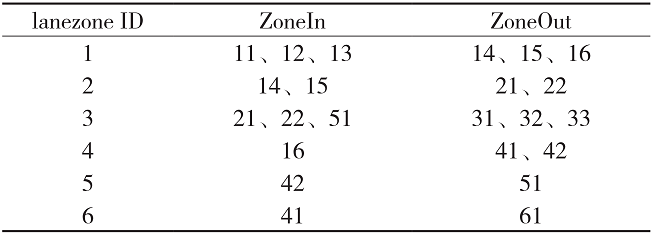
lanezone 内部拓扑关系如表 1 所示。在 lanezone 内 ZoneIn 任意一个拓扑点均可到达 ZoneOut 任意一点,因此 ZoneIn 和 ZoneOut 可以看作是 lanezone 的「接口」,只要能从 ZoneIn 驶入,就可从 ZoneOut 驶出。
表 1 lanezone 驶入和驶出拓扑点列
3. 基于车道拓扑关系的路径规划
基于 lanezone 级别的拓扑关系,其实质是一种含权重的有向图,因此可以使用双向 Dijkstra 算法进行最优路径规划。首先根据定位匹配结果计算起点和终点所在的 lanezone 编号,然后从起点到终点进行正向搜索,获得起点能达到的 lanezone 序列,再从终点到起点反向搜索,获得终点能达到的 lanezone 序列,两次搜索后,将既能达到起点也能达到终点的 lanezone 放入结果,即路径规划结果。Dijkstra 算法流程如图 6 所示,Open 表保存所有已生成而未考察的节点,Close 表记录已访问过的节点。
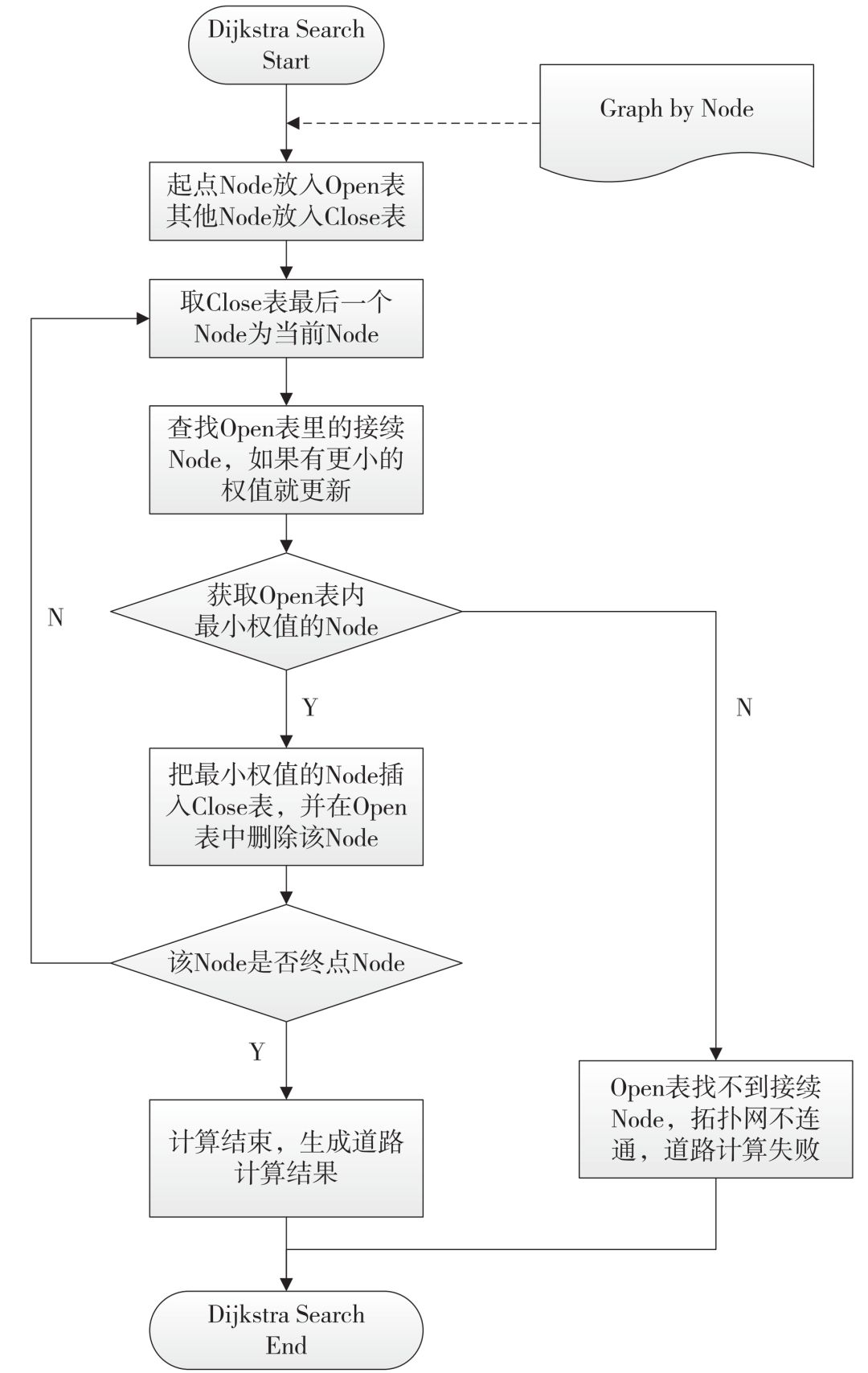
图 6 Dijkstra 算法流程图
lanezone 路径规划结果为最优路径规划下车辆从当前位置到达目的地的所有可通行车道,可作为自动驾驶一次规划的基础底图以及多源数据融合参照,如在该结果上叠加其他传感器感知的可通行区间,实现对动态障碍物的过滤和通行区间的细化。通过 lanezone 的驶入和驶出拓扑点列,可快速获取 lanezone 内部车道路径规划结果。
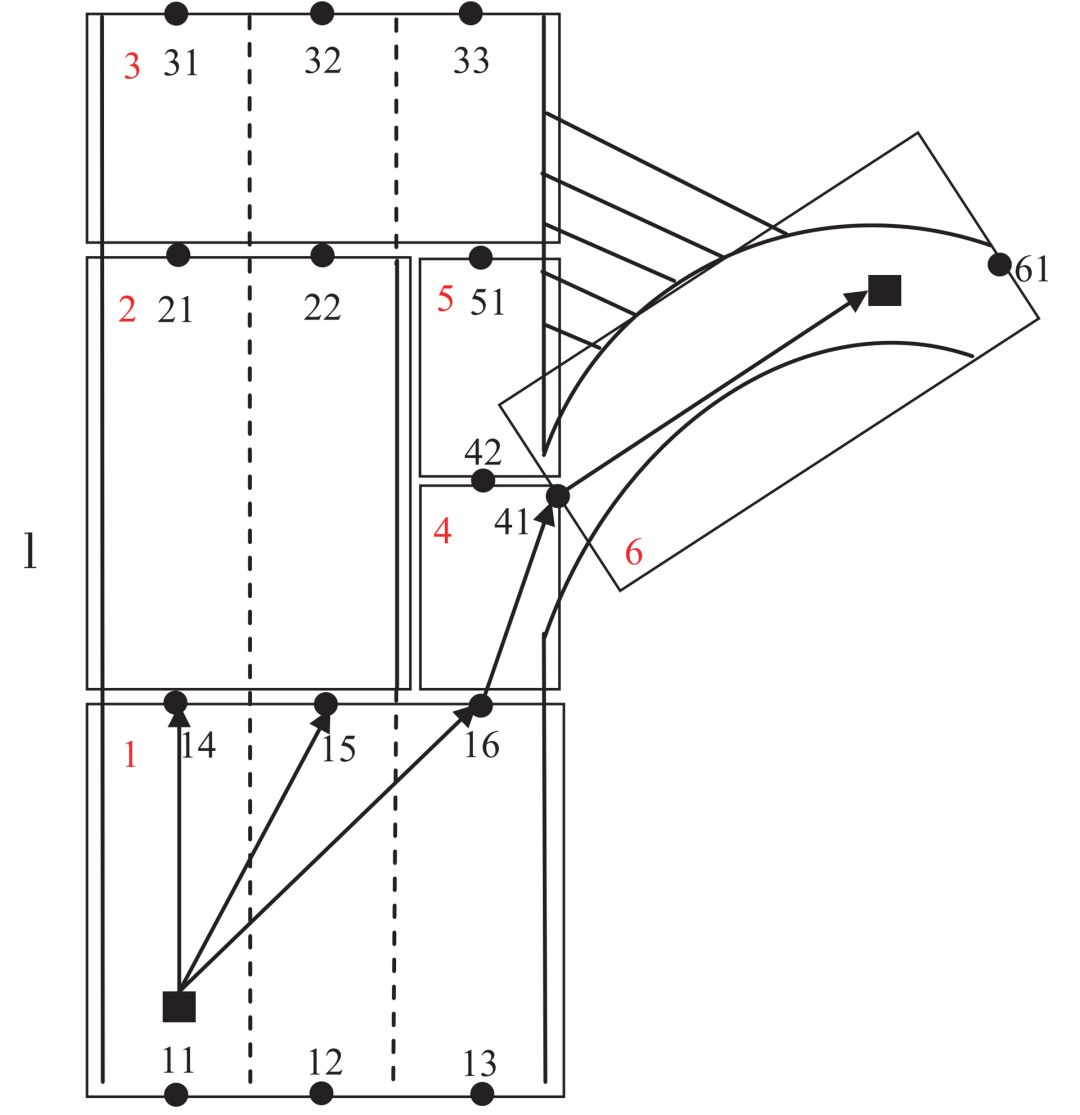
图 7 车道级路径规划
如图 7 所示,黑色方块分别代表车辆起点和终点位置,通过上一步 lanezone 道路计算,得到的 lanezone 路径规划结果为:1-4-6。lanezone 1 的驶出 ZoneOut={14,15,16},lanezone 4 的驶入 ZoneIn={16},驶出 ZoneOut={41},lanezone 6 的驶入 ZoneIn={41},因此车道级路径规划结果为:起点-16-41-终点。
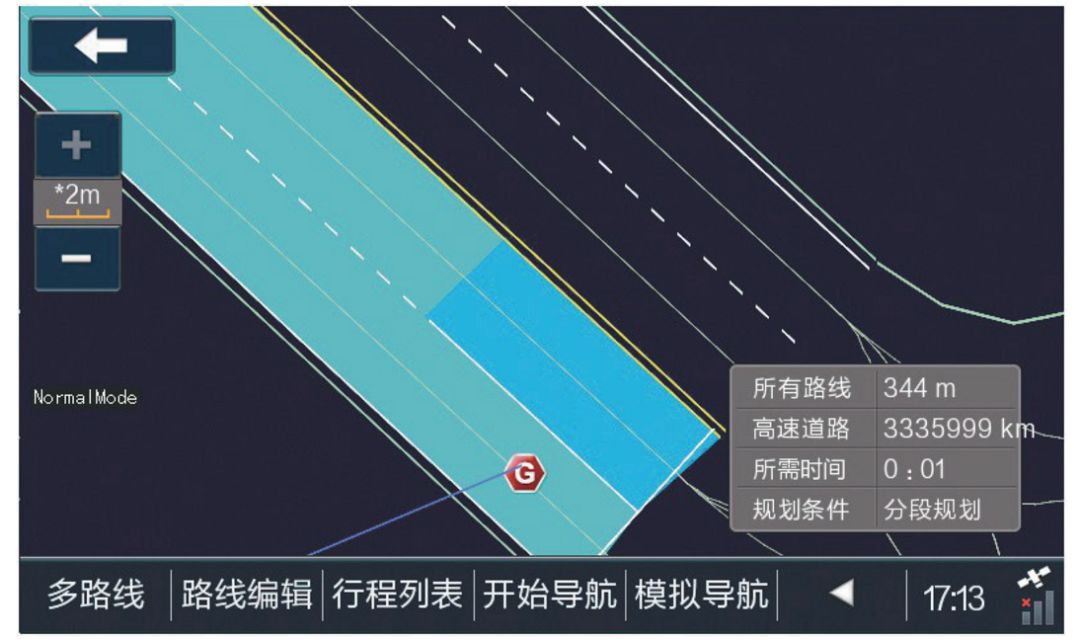
图 8 车道级路径规划展示
通过应用程序实现上述路径规划方法的展示结果如图 8 所示,其中 G 代表终点;浅青色代表路径规划结果,即可通行区间集合;蓝色区块代表被过滤的车道区间,该区域横向上以实线分隔车道,不能从蓝色区块变道到 G 点所在车道,即无法达到目的地,因此被排除在路径规划结果之外,而根本原因则是车道驾驶态势不同。
综上所述,基于车道驾驶态势的变化和分布,构建 lanezone 级别及其内部的车道拓扑关系,可实现顾及变道信息在内的车道级路径规划,为自动驾驶提供更为精确的车道级感知和认知基础。
4. 结语
针对高精度地图在自动驾驶中的应用,本文提出了一种基于车道驾驶态势的拓扑构建和路径规划方法,并进行了实验验证;实现了车道级导航功能和自动驾驶一次规划,并为自动驾驶二次规划提供可驾驶道路区间。
在 lanezone 内允许车辆直行或左右变道,且保持横向水平。lanezone 之间的拓扑关系以区间纵向长度为通行代价之一,构成含权重的有向图;运用 Dijkstra 算法进行最优路径规划,完成自动驾驶一次规划。
本文通过驶入和驶出接口来表达 lanezone 内部拓扑关系,可快速完成车道级路径规划,为自动驾驶二次规划提供依据。未来还需大范围实验和测试以评估和优化该方法的应用效率,并深入融合多源传感器数据,系统验证自动驾驶二次规划功能。
参考文献
[1] TAO Z, Bonnifait P, Fremont V, et al. Mapping and Localization Using GPS, Lane Markings and Proprioceptive Sensors[C]
IEEE/RSJ International Conference on Intelligent Robots and Systems,2013,8 215(2):406-412
[2] Nedevschi S, Popescu V, Danescu R, et al. Accurate Ego-vehicle Global Localization at Intersections Through Alignment of Visual Data with Digital Map[J]. IEEE Transactions on Intelligent Transportation Systems,2013,14(2):673-687
[3] Ziegler J, Bender P, Schreiber M, et al. Making Bertha Drive: an Autonomous Journey on a Historic Route[J]. IEEE Intelligent Transportation Systems Magazine,2014,6(2):8-20
[4] LIU L M, WU T, FANG Y Q, et al. A Smart Map Representation for Autonomous Vehicle Navigation[C].International Conference on Fuzzy Systems and Knowledge Discovery,2015:2 308-2 313
[5] Geiger A, Lauer M, Moosmann F, et al. Team Annie WAY's Entry to the 2011 Grand Cooperative Driving Challenge[J]. IEEE Transactions on Intelligent Transportation Systems,2012,13(3):1008-1017
[6] Bétaille D, Toledo-Moreo R. Creating Enhanced Maps for Lane-level Vehicle Navigation[J]. IEEE Transactions on Intelligent transportation systems,2010,11(4):786-798
[7] Amano H, Uchimura T. A National Project in Japan: Innovation of Automated Driving for Universal Services[M].Road Vehicle Automation 3. Springer International Publishing,2016:15-26
[8] 渡辺陽介 , 高田広章 . 運転支援· 自動運転のための高精度デジタルマップ [J]. 日本ロボット学会誌 ,2015,33(10):754-759
[9] Bender P, Ziegler J, Stiller C. Lanelets: Efficient Map Representation for Autonomous Driving[C]. IEEE Intelligent Vehicles Symposium Proceedings,2014:420-425
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
sasa@ihoushi.com

点击阅读原文,查看文章《ADAS 毫米波雷达原理与电磁抗扰能力初探》


