四足机器人走得慢,轮式机器人容易被石头挡住,那么怎么让机器人走得又快又顺利呢?可以穿轮滑鞋啊!
这是 ANYmal 机器人给出的最新解决方案,论文一作是苏黎世联邦理工学院的博士研究员 Marko Bjelonic。这种腿和轮子混合的机制意味着该机器人不仅能够在光滑的平面上迅速移动,同时也能跨越挡在路上的障碍物。它跨越障碍的能力比轮式机器人强,同时又比腿式机器人走得快,就像一个人穿了轮滑鞋。
研究人员表示,这是全球首个应用在实际任务中(DARPA 机器人地下挑战赛)的轮式-腿式混合驱动机器人。
![]()
这款机器人能在腿式和轮式两种运动方式之间快速切换,动作非常流畅。
![]()
![]()
ANYmal「轮滑」机器人在 DARPA 机器人地下挑战赛中挑战复杂地形。
来自苏黎世联邦理工学院(ETH Zurich)的 ANYbotics 今年初曾因为一款四足机器人 ANYmal 闻名于世,这款机器人可以爬行、快跑、跳跃、从跌倒中爬起、爬楼梯、穿越/清除障碍物。它似乎比波士顿动力的 SpotMini 适应性都强。很快,ANYmal 的论文登上了 Science 子刊《Science Robotics》,研究人员表示,这款机器人使用了深度强化学习技术。
![]()
利用在模拟中训练的策略,ANYmal 获得了之前方法无法实现的运动技能:它能精确、高效地服从高水平身体速度指令,奔跑速度比之前的机器人更快,甚至在复杂的环境中还能跌倒后爬起来。
不过这还远不是最终版,研究人员最近给 ANYmal 的四足装上了轮子,这种方式让它相比所有其他机器人有了更大的通用性:
该团队已将这款机器人的研究论文提交至 2020 IEEE 世界机器人与自动化大会(ICRA),标题以一首歌为开头:《Rolling in the Deep – Hybrid Locomotion for Wheeled-Legged Robots using Online Trajectory Optimization》。
论文链接:https://mbjelonic.github.io/publications/files/2020_ral_bjelonic.pdf
下面就让我们看一看这款机器人具体采用了哪些技术以及如何实现操控的。
一般而言,腿式机器人能够适应具有挑战性的环境,因而也能够在各种类型的地形下实现操控。科学研究和工业应用通常强调复现性,从而改进机器人系统的硬件设计和算法途径。即使进行了大量的研究,传统腿式机器人的运动性能能否完美适应并克服其天然阻碍物依然是一个难题。
在这种情况下,轮子就可以扩展这些腿式机器人的性能,尤其是速度,这对挑战性环境中需要机器人展现速度和远距离运动性能的任何任务而言都非常重要。基于这种想法,该团队研究者对轮式-腿式混合机器人进行了运动规划,以在各种类型的地形环境中实现动态混合运动,既能行走跨越障碍物,又能借助轮子快速滑动前进。
![]()
图 1:全扭矩控制的四足机器人 ANYmal 安装了四个非转向型、扭矩控制的轮子。图上:ANYmal 跨越木块;图中左:ANYmal 在不平的地面上行走,图中右:ANYmal 的轮子上安装链条,可以在泥地上行走;图下:ANYmal 在 2019 地下挑战赛中(DARPA Subterranean Challenge)中快速绘制地图、导航和搜索动态地下环境。
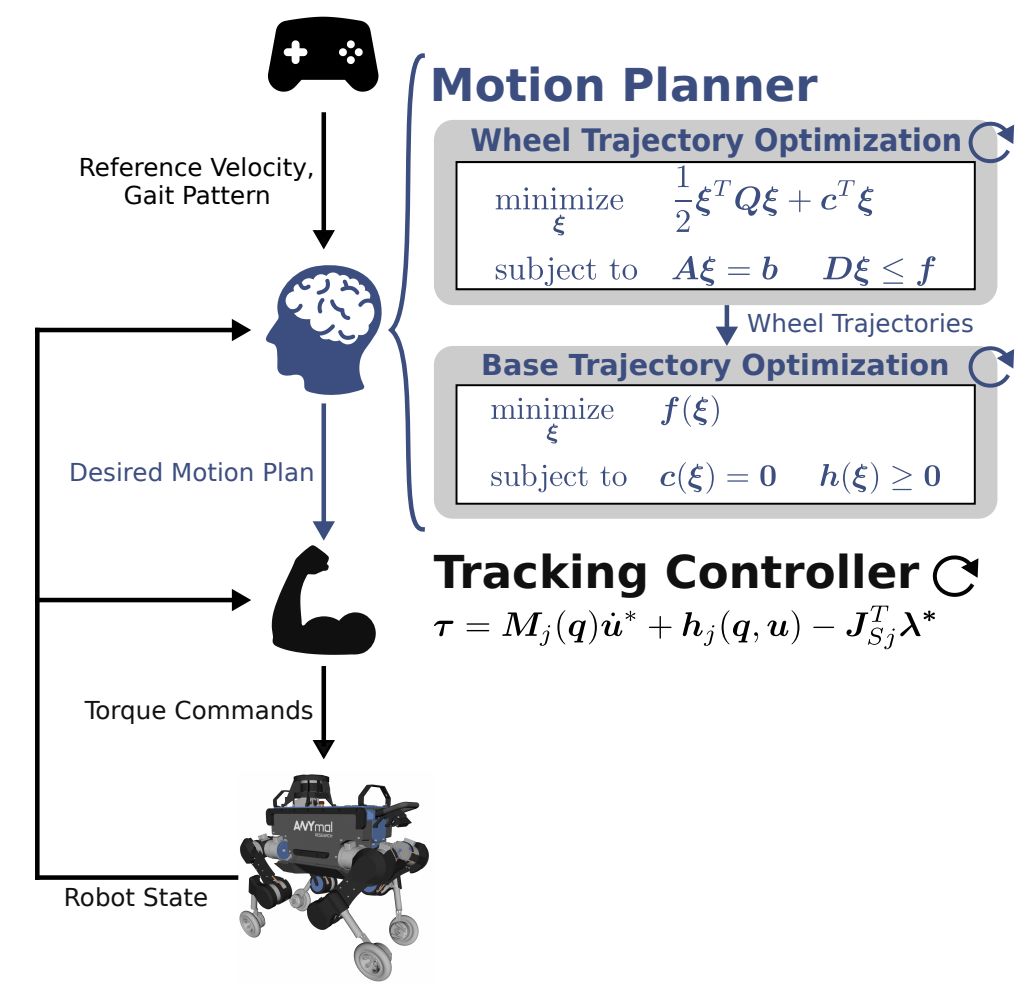
研究者提出了一个在线轨迹优化(TO)框架,通过将问题分解为单独的轮子和基本轨迹优化来打造一个能以模型预测控制(MPC 模)方式奔跑的轮式-腿式机器人。对于动态一致的运动,该轮式 TO 需要考虑轮子的滚动约束,而基础 TO 则考虑机器人在运动期间的平衡,此处用到的是零力矩点思想(zero-moment point,ZMP)。一个分级的 WBC 通过计算所有关节的扭矩命令来跟踪这些运动。该混合运动框架通过以下方式扩展了轮-腿机器人的能力。
该框架适用于各种各样的步态,如静态稳定步态、动态稳定步态以及 full-flight phase 步态等、
研究者以毫秒为单位切换机器人的两种运动方式。由于这种切换频率非常快,机器人可以稳健地对抗无法预知的干扰,使其在现实世界的部署成为可能。
![]()
图 2:
运动规划和控制结构演示。
运动计划基于 ZMP 方法,该方法考虑了优化的轮子轨迹和机器人的状态。
分级 WBC 优化了整体加速和接触力,追踪操作空间推理。
最后扭矩数据被传送到机器人处。
由于采用分层结构,轮子 TO、基础 TO 和 WBC 可以实现并行。
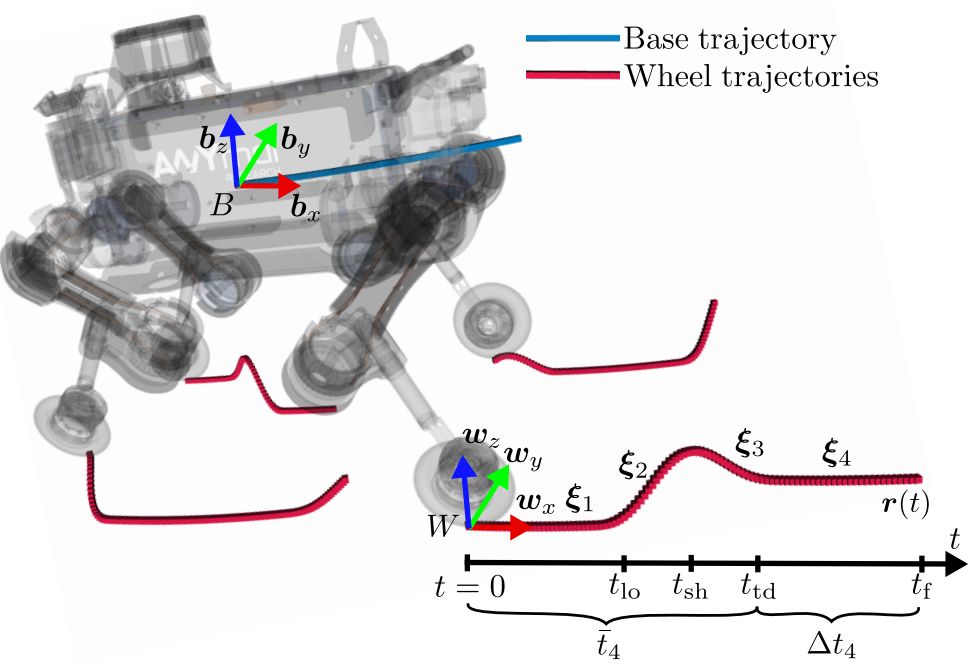
![]()
图 3:车轮基本轨迹的草图。
为了提高新平台的可靠性,研究者正计划进一步提高硬件的成熟度,如增加车轮的抓地力。此外,如何设计能够在车轮模式和行走模式之间自由切换的 AI 算法也是一大挑战。目前,ANYmal 在前进时使用的还是类似于轮滑的小跑+车轮滑动模式,如果在平坦的道路上实现纯车轮滑动前进,则前进的速度和稳定性还能够进一步提高。
https://www.youtube.com/watch?time_continue=7&v=ukY0vyM-yfY
https://mbjelonic.github.io/publications/files/2020_ral_bjelonic.pdf
✄------------------------------------------------
加入机器之心(全职记者 / 实习生):hr@jiqizhixin.com
投稿或寻求报道:content@jiqizhixin.com
广告 & 商务合作:bd@jiqizhixin.com