带L1正则约束的优化
前言:断更了4个月,心里着实有点过意不去。趁着过年的这段空闲时间,把之前挖的坑给埋上。先简要回忆下上回内容里所说的。在上一回的内容中提到了稀疏编码的几个主要作用:1)数据压缩;2)分类;3)提高检索效率。介绍了两种可以获得稀疏编码的方法:矢量量化(Vector Quantization)和非负矩阵分解(Non-negativeMatrix Factorization)。其中矢量量化的核心思想是通过获得数据的编码簿(codebook),进而获得样本点所对应的分类信息。这里的稀疏编码对应的就是分类信息。非负矩阵分解的核心思想是获得表示样本点的一组基,通过非负约束,这组基向量具有稀疏以及对局部特征的良好性质,部分解决了表示学习的结果通常不具有可解释性的问题。而今天我们将主要介绍获得稀疏变量的一种主要方法—L1正则优化。
1 什么是L1正则约束
L1正则约束是直接产生稀疏编码的一种方法,对于需要进行稀疏约束的变量w,在L1正则中将变量w的所有项取其绝对值相加,并希望这个相加值在优化过程中最小。为此,通过L1正则约束后的变量w中会大量出现值为0的项,从而达到变量w稀疏的情况。加入L1正则约束后的优化目标为:
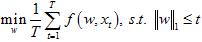
或者

其中T表示观测样本数量,t表示某一观测样本的序号,函数f为输入为xt,参数为w的目标函数,‖.‖1表示L1正则约束。一般称第一个优化目标(公式1)为有限制条件的形式化,第二个目标(公式2)为无限制条件的形式化。L1正则约束的表述虽然简单,但对上述的两个目标函数的直接优化都是非凸优化,不易通过直接对梯度进行优化的方式获得结果。关于加入L1正则项后的优化方法有很多讨论,这里我主要介绍两种比较易于实现的方法,以供大家选择。
2 方法一:TG(Truncated Gradient)
TG由Langford于2009发表在JMLR上,这一优化非常简单明了,其核心思想为:在优化过程中L1正则项作为限制条件,将满足某一设定阈值的变量w直接截断为0,从而达到稀疏的目的。虽然这种比较“暴力”的截断可以达到稀疏的目的,但对变量进行截断之后可能会使得优化无法收敛,而TG的目标正是尝试解决这一问题。直接看TG的优化过程。
算法1:TG
输入:阈值θ≥0,序列gt≥0,学习率η∈(0, 1),截断轮K,观测样本O
初始化:wj←0 (j=1, ... , d)
for t=1, 2, …
(截断)如果t mod K等于0
for 变量wj (j=1, ... , d)
如果wj>0并且wj≤θ,则wj←max{wj−ηgt, 0}
如果wj<0并且wj≥-θ,则wj←min{wj+ηgt, 0}
end for
更新梯度:w←w+η▽f(w, x)
end for
输出:w
根据TG的优化过程,我挑选TG算法中比较重要的几个执行点进行解释:
1) 不需要在每一迭代轮t中对参数w进行截断,如果截断过于频繁,则对目标函数的优化将无法收敛。而如果截断的频次过少,则达不到设置L1正则项的目的。在实际的实现过程中,令参数K表示每K轮进行一次截断,通过调整K的大小来确定截断频次。一般在实际应用中,K的取值以10为单位尝试选择,比如K=10,20,30,…;
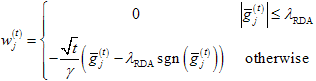
2) 选择截断函数为如下的分段函数形式:

这种形式的分段函数保证了截断过程不会过于激进,而是相对缓慢进行截断操作。下图的右侧展示的是TG中所用的截断函数的效果示意。而左侧则是直接截断的效果示意。

可以观测到这两种截断函数的明显不同;
3) 序列gt的设置。在TG算法中,我们会将截断函数中的参数gt(α=gt)随着迭代轮次的不同而变化。一般可以将序列gt设置为gt =ηKg,其中g为常数,且ηK远小于θ。为了简化TG的调参过程,在原文中,作者提出可以令gt=θ;
4) θ的设置。在原文中,为了简化TG的调参过程,作者提出了两种设置方法:1)令θ= g;2)令θ=∞。
总的来说,TG算法的实现相对简单,很容易应用随机梯度下降法进行优化。但TG算法并不严格保证算法的收敛,不容易在变量w设置为较稀疏情况下实现快速收敛。为此,我将介绍第二种优化方法。
3 方法二:RDA(Regularized Dual Averaging)方法
由于直接优化引入L1正则项的目标函数较为困难,为此Xiao于2009年在NIPS上提出L1-RDA算法,其核心思想为:通过Bregman距离(Bregman Divergence)构造对公式2的对偶形式,通过对对偶形式的优化求解结果(具体的对偶求解过程略)。RDA算法可以描述为:
算法2:L1-RDA算法
输入:正则项系数λ≥0,稀疏增强参数ρ≥0,参数γ>0,观测样本O
初始化:wj←0 (j=1, ... , d)
for t=1, 2, …
计算梯度:gt=▽f(w(t-1),x)
ḡ(t)=(t-1)/t×ḡ(t-1) + 1/t×g(t)
λRDA=λ+γρ/sqrt(t)
更新梯度:
end for
输出:w
在算法2中,sgn表示符号函数,当输入为正时,输出为1;输入为负时,输出为-1;输入为0时,输出为0。
L1-RDA算法的参数设置说明如下:
1) 参数γ。这个参数主要控制算法的学习速率,该参数越小则学习率越大,收敛越快。同时也会使得所学的变量w的稀疏程度越大。一般地,这个参数可以为1000为单位进行调整;
2) 参数ρ。这个参数主要配合参数γ控制阈值λRDA在迭代过程中初始值的大小。一般地,这个参数设置的量级为10-3,也就是说,γρ一般为取值为[1,100]的数值;
3) 参数λ。这个参数主要控制变量w的稀疏程度。一般地,这个参数的选择可以以数量级为单位进行变化,例如λ=0.001,0.01,0.1,1,10,…。
L1-RDA算法有良好的收敛性保证,同时也是适用于在线学习的算法,因此L1-RDA算法是一种普遍较为认可的带L1正则约束的目标函数的优化方法。
总结
以上两种方法都比较方便实现,也可以适用于同时需要优化L1和L2正则约束的场景。相较而言,TG算法的实现更为简单,较适用于对场景问题的探索。而L1-RDA算法则较为适合对带L1约束问题的高效优化。大家可按适用的场景选择。
参考文献:
Langfordet.al. Sparse Online Learning via Truncated Gradient. JMLR 2009.
Xiaoet.al. Dual Averaging Methods for Regularized Stochastic Learning and Online Optimization. JMLR 2010.