基于相交线的双目平面SLAM
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文由博主: 授权转载,二次转载请联系原作者
原文地址:https://blog.csdn.net/qq_26623879/article/details/109140809
论文题目:Stereo Plane SLAM Based on Intersecting Lines
摘要
平面特征是SLAM系统中减小漂移误差的一种稳定标志。从密集点云中提取平面是一种简单、快速的方法,常用于RGB-D相机或激光雷达。但是对于立体相机来说,密集点云的精确高效计算是一个难点。本文提出了一种从立体图像中提取相交线计算平面参数的新方法。平面特征普遍存在于人造物体和构筑物的表面,具有规则的形状和直线的线条。在三维空间中,两条相交的直线可以确定这样一个平面。因此,我们从立体左、右图像中提取直线段。通过立体匹配,计算出三维空间中的端点和直线方向,进而计算出平面。在立体SLAM系统中加入这样的计算平面特征可以减小漂移误差,提高系统性能。我们在公共数据集上测试了我们提出的系统,并与最先进的SLAM系统进行了比较,证明了它的鲁棒性和精确性。
概况
Line 和 plane 特征对SLAM的作用
现实环境中有丰富的线,面特征,他们能在SLAM中作为比较稳定的路标帮助SLAM提高稳定性和准确性。与线特征相比,平面具有简单、鲁棒的数据关联性,因而更加稳定。此外,平面甚至可以在大距离的帧中进行匹配,这有助于减小漂移误差。
Line and plane 提取
线特征提取:
LineSegmentDetector https://www.sciencedirect.com/science/article/abs/pii/S1047320313000874
先用LBD
https://dl.acm.org/doi/10.1016/j.jvcir.2013.05.006
从图像提取然后追踪
面特征提取:通常从RGBD或激光雷达中提取,从双目匹配提取但是双目匹配效率太低(可以从当前的双目匹配入手增加效率)
本文研究问题与贡献
本文提出了一种从立体图像中计算平面特征的新方法。平面特征普遍存在于人造物体和结构的表面。这些平面通常有规则的形状和直线。在三维空间几何中,两条相交的直线可以确定一个平面。因此,用直线来计算平面特征是合理和可行的。立体匹配可以从立体图像中计算出三维直线[4]。(作者避免双目匹配,改用双目中的线特征来计算平面特征)
与直接使用线特征相比,平面特征避免了复杂的参数化,实现了简单而稳健的数据关联。此外,平面也是更精确的地标:
基于相交线从立体图像计算平面特征的新方法。
使用提取点和计算平面的立体重击系统。
在公共数据集上进行评估,我们的系统得到了稳健和准确的估计结果,并实现了最先进的性能。
方法
从线特征提取面特征
符号表示
线特征提取计算

面计算
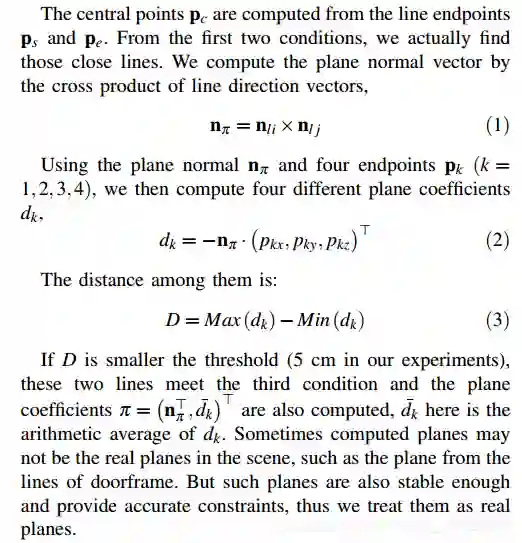
从相交线中,找满足面特征的直线
两条直线之间的角度大于阈值(在我们的实验中为10°)
中心点之间的距离小于线长度。
这两条直线的四个端点位于同一平面上。
计算过程:
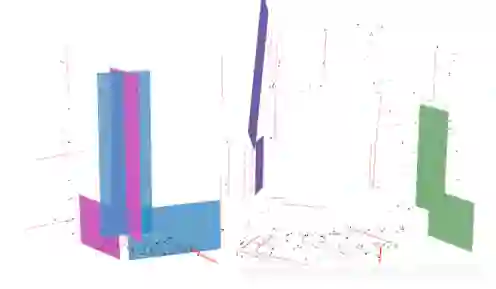
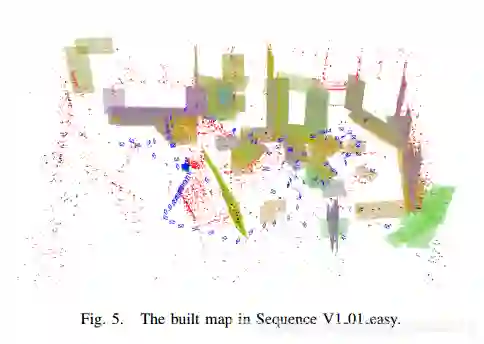
黑点是从立体图像中提取的特征点。红线是从立体图像中提取的线段,其三维位置由匹配的端点计算。请注意,我们在SLAM系统中没有使用这些线段,我们在图中绘制它们只是为了显示计算平面特征的过程。我们通过展开相应的相交线来绘制计算平面,它们以不同的颜色绘制。由于线段的错误,图中的紫色平面似乎不正确,我们将在稍后的检查中将此平面标记为无效。但其他飞机似乎是正确的,将被用作我们的大满贯系统的有效地标。
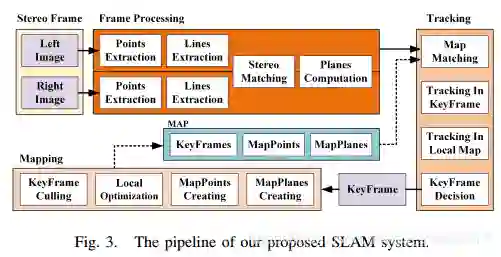
系统结构
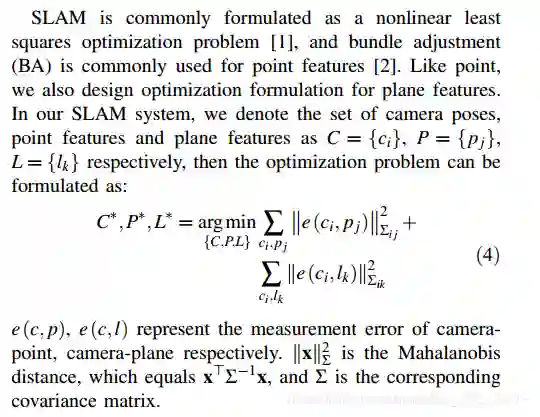
优化
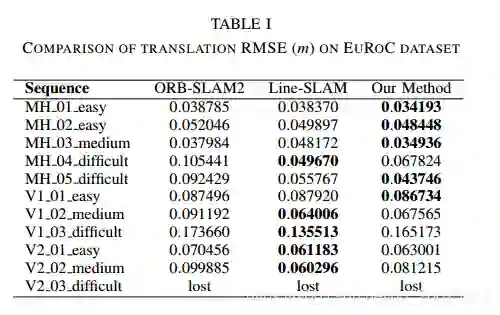
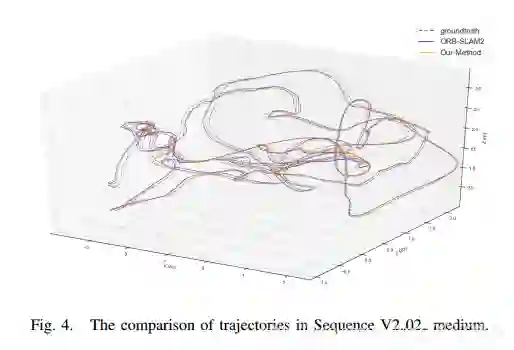
结果
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓



