报名|上海交大高峰教授来京分享!本周六高端沙龙:设计是机器人智能之本

腿足机器人是机器人领域还没进入应用阶段就异常火爆的一类产品,这从近期刷屏的波士顿动力的SpotMini也不难看出。我国对于仿生腿足机器人的研发,虽然相比美国起步较晚,但也有一些不错的成果。

上图是今年世界机器人大会上的一个场景,上海交大高峰教授团队的六足机器人“青骓”以优越的性能和稳定的发挥,荣获2018年世界机器人大赛足式移动机器人组赛事一等奖。
之前我们还介绍过高峰教授团队的两款灾害救援机器人(点击进入传送门)
以高峰教授为带头人的智能行走作业机器人研究中心所依托的是上海交通大学机械与动力工程学院机械系统与振动国家重点实验室。该团队主要从事并联机器人设计理论及其应用关键技术的研究,在机器人设计理论、新型机器人发明、新型并联构型装备研制方面具有鲜明特色和突出优势,并取得过丰硕成果。下图的机器人只是实验室中的冰山一角~


高峰教授
上海交通大学教授、国家973计划首席科学家、国家杰出青年基金获得者,获国家自然科学二等奖1项和省部级奖8项、美国机械工程师学会ASME达芬奇设计与发明奖、何梁何利科学与技术进步奖,获授权发明专利110项,发表SCI论文112篇,出版中英文专著3部。主要研究方向并联与步行机器人的设计与控制。
大自然创造的生命既有躯体又有灵魂。人类如何从万物生灵中获得灵感,使机器人具有类人的智能行为?
本次的分享内容将以步行机器人为例,介绍机器人的机构发明、基础部件开发、行为智能设计等方法。
开发步行机器人的主要挑战包括: 如何根据实际需求设计机器人机构系统,使机器人具有明显实用性。如何设计机器人高能量密度驱动系统,使机器人具有良好动态响应特性。如何根据感知信息设计机器人控制系统,使机器人具有智能。这些问题高峰教授将为大家进行详细解答。
说到步行机器人的应用,包括智能制造步行机器人、人机协同装配作业步行机器人、极端环境服役的步行机器人、核电站探测与维护步行机器人、消防与救援步行机器人等。

讲座题目:设计是机器人行为智能之本
讲座要点:
1. 步行机器人机构设计
2. 机器人基础部件设计
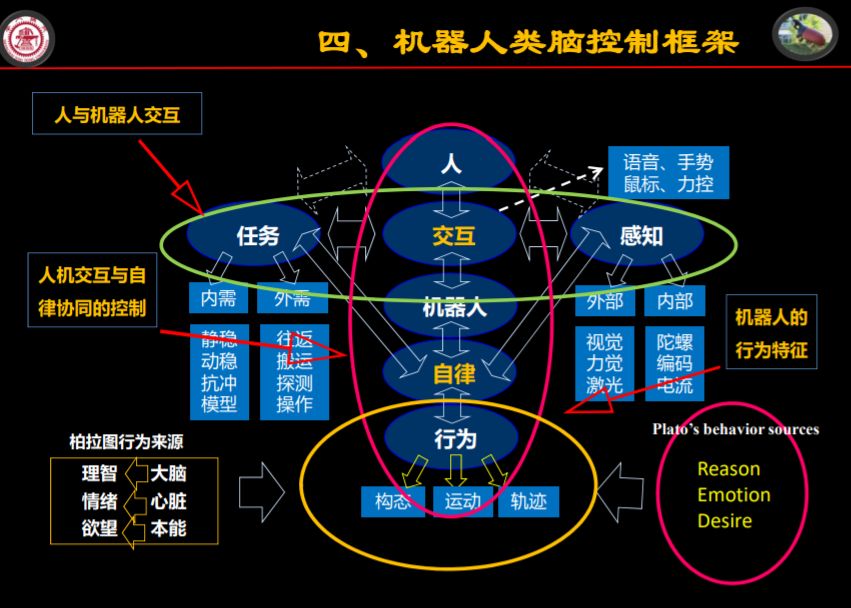
3. 机器人类脑控制框架
4. 行走作业机器人应用
讲座主题:《设计是机器人行为智能之本》
分享方式:线下咖啡沙龙
活动时间:10月27日(周六)下午14:30
报名方式:关注“机器人大讲堂”机器人大讲堂微信公众号,回复“报名”
活动地点:北京市海淀区清华科技园C座B1层启迪之星RT创投咖啡
联系人:堂博士 13810423387(同微信)
观众福利:到场观众均可获得一本《协作机器人行业发展蓝皮书》
活动流程
14:30——15:00 签到&到场观众自我介绍
15:00——16:00主讲报告与交流 (60人)
16:00——17:00机器人大讲堂·私享会(限6人)
报名信息
主讲报告和交流环节66元/人,
机器人大讲堂·私享会,199元/人
【注:学生凭学生证可享受6折优惠,报名信息需由工作人员审核通过】
机器人大讲堂·私享会

机器人大讲堂高端沙龙讲座结束后,举办小型闭门分享会,为需要进一步深度沟通的朋友提供与嘉宾面对面交流的机会——深度探讨、寻求合作、资源对接等等,私享会全部满足你。

机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
由IEEE(国际电子和电气工程师协会)机器人与自动化学会主办,北京理工大学等单位承办的2018年IEEE-RAS仿人机器人国际学术会议( Humanoids 2018)将于2018年11月6日至9日在北京友谊宾馆举行。大会主席由黄强教授、戴斌教授共同担任。
现已全面开启企业赞助和招展通道,强烈推荐机器人、科研仪器等与高校合作有关的企业参展。
联系人:堂博士 13810423387(同微信)
☟

IEEE-RAS仿人机器人国际会议是仿人机器人领域最权威、最有影响力的国际学术会议,从2000年开始在全球各国巡回举办,目前已成功举办了17届,会议涉及的信息具有极高的前瞻性和应用价值。2018年IEEE-RAS仿人机器人国际会议首次在中国举行。






