【泡泡一分钟】利用直线和平面对应关系自动标定相机与三维激光雷达之间的外参
每天一分钟,带你读遍机器人顶级会议文章
标题:Automatic Extrinsic Calibration of a Camera and a 3D LiDAR using Line and Plane Correspondences
作者:Lipu Zhou, Zimo Li, and Michael Kaess
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:王丹
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文中使用棋盘格标定板处理了相机与三维激光雷达之间的外参标定。与之前要求至少三个棋盘格标定板位置不同,我们的算法通过联合三维线和面对应关系将最少需要的棋盘格位置减少到1。
另外,本文证明了具有平行边界的平行平面目标在本文算法中提供了相同的约束条件。这使得可以将棋盘放置在LiDAR附近,这样激光点可以更好地接近目标边界而不失一般性。此外,本文提出了一种估算激光雷达和相机之间相似性变换的算法,用于仅考虑激光点和像素之间的对应关系的应用。使用相似变换可以简化校准过程,因为不需要棋盘的物理尺寸。同时,由于棋盘尺寸的不可避免的测量误差以及将LiDAR测量值转换为公制测量值的LiDAR内在比例因子,本方法的估计结果更准确。本文算法通过模拟和实验验证。与仅使用平面信息的算法相比,本文算法可以通过减少位置数来获得更准确的结果,这有利于大规模商业应用。
本文算法:
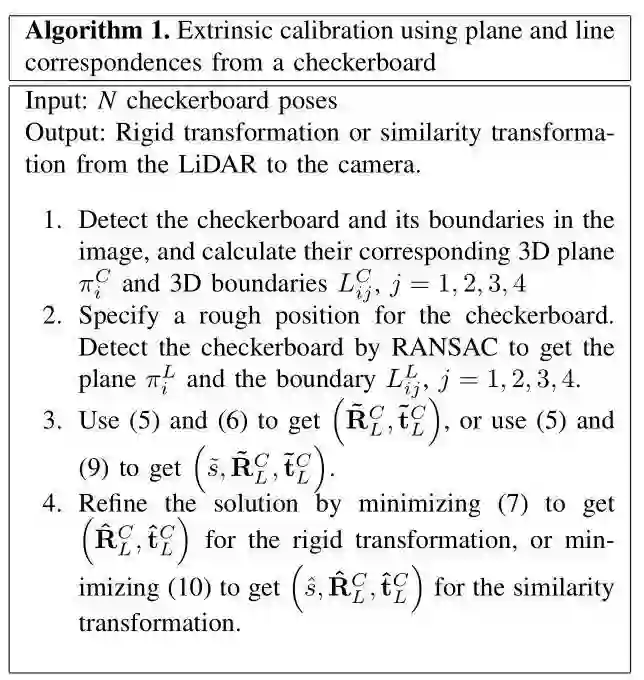
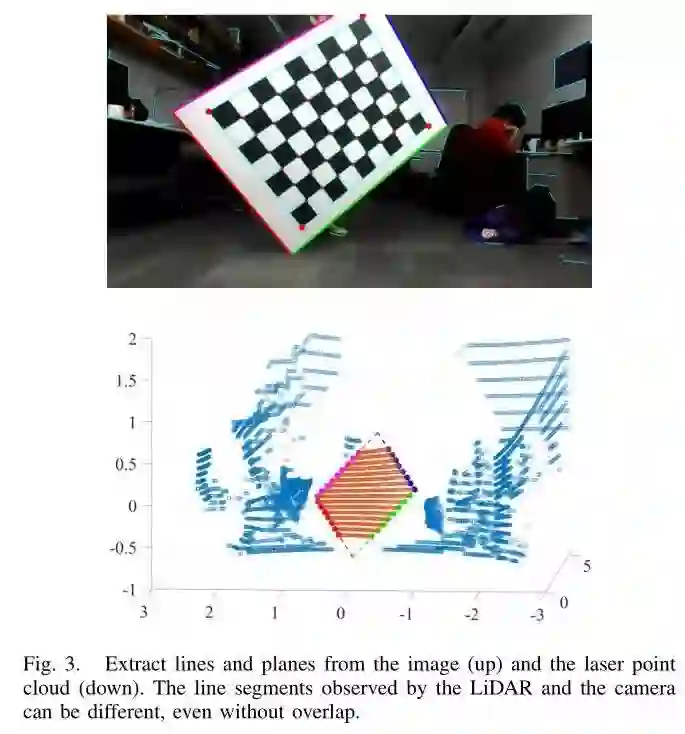
图3.从图像(向上)和激光点云(向下)提取线和平面。LiDAR和相机观察到的线段可以是不同的,即使没有重叠。

图5.每个棋盘格数量的200次蒙特卡罗试验的中位数和平均轮换(上)和平移(下)错误。
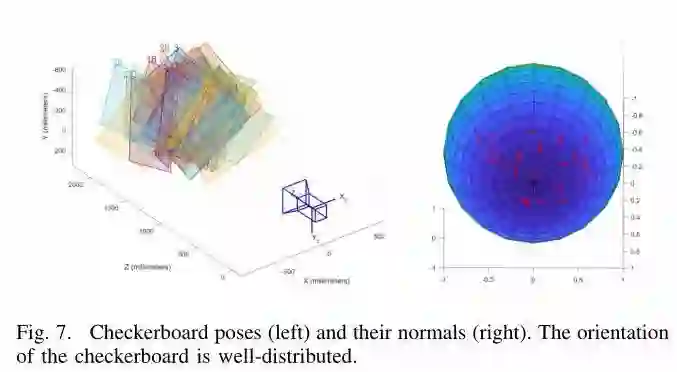
图7.棋盘构成(左)和它们的法线(右)。棋盘的方向分布均匀。

图10.使用我们的算法(红点)和Unnikrishnan算法(蓝点)的外部参数反投影激光点。在该示例中使用三个姿势。

Abstract
In this paper, we address the problem of extrinsic
calibration of a camera and a 3D Light Detection and Ranging (LiDAR) sensor using a checkerboard. Unlike previous works which require at least three checkerboard poses, our algorithm reduces the minimal number of poses to one by combining 3D line and plane correspondences. Besides, we prove that parallel planar targets with parallel boundaries provide the same constraints in our algorithm. This allows us to place the checkerboard close to the LiDAR so that the laser points better approximate the target boundary without loss of generality. Moreover, we present an algorithm to estimate the similarity transformation between the LiDAR and the camera for the applications where only the correspondences between laser points and pixels are concerned. Using a similarity transformation can simplify the calibration process since the physical size of the checkerboard is not needed. Meanwhile, estimating the
scale can yield a more accurate result due to the inevitable measurement errors of the checkerboard size and the LiDAR intrinsic scale factor that transforms the LiDAR measurement to the metric measurement. Our algorithm is validated through simulations and experiments. Compared to the plane-only algorithms, our algorithm can obtain more accurate result by fewer number of poses. This is beneficial to the large-scale commercial application.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:nsyc
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





