GitHub 标星 2.5K+,U^2-Net 跨界肖像画,完美复刻人物细节!





-
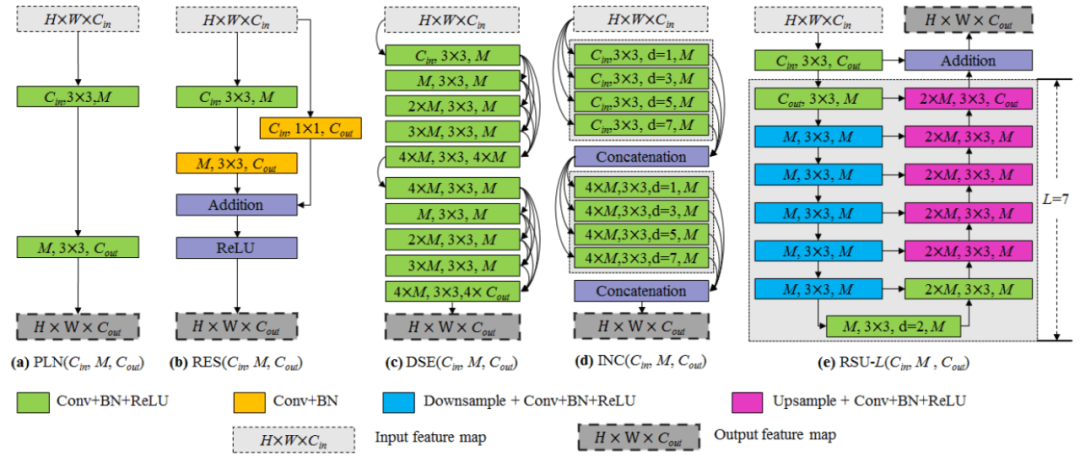
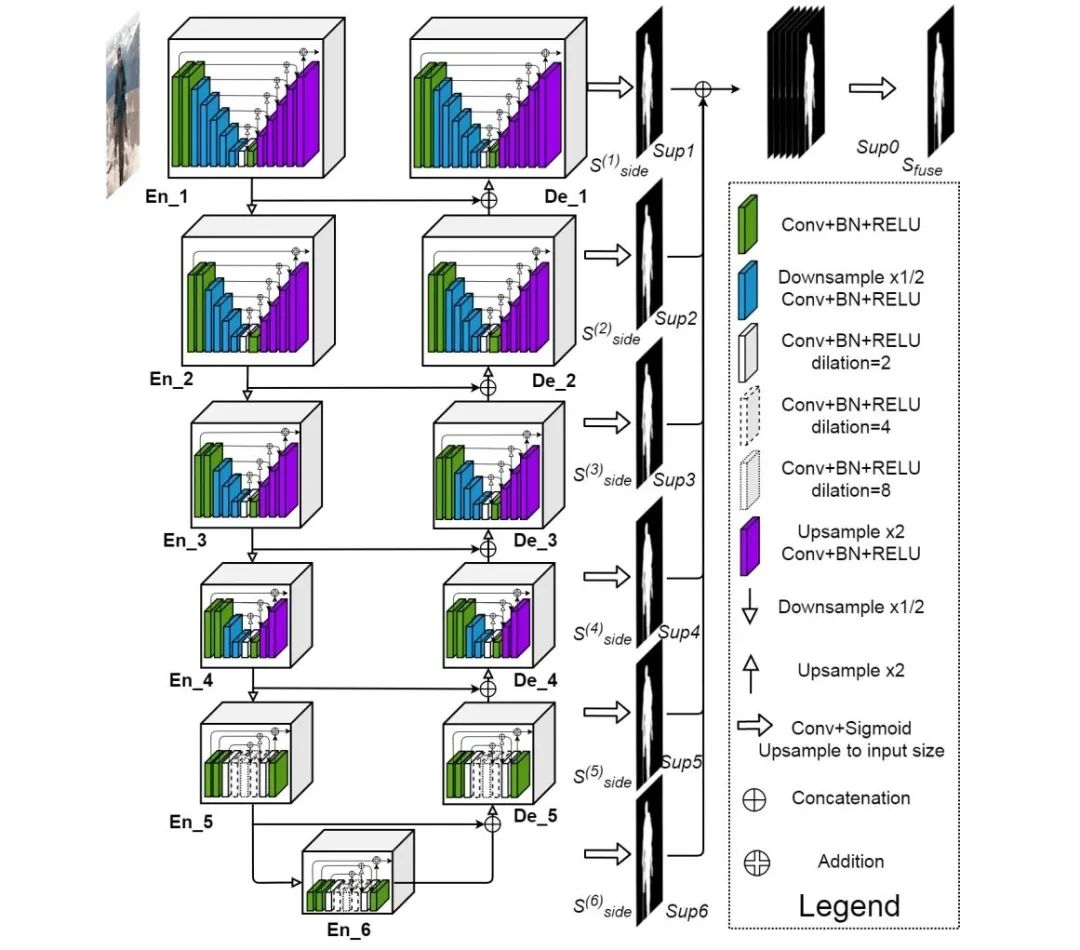
6 阶段编码器; -
5 阶段解码器; -
与解码器阶段和最后编码器阶段相连接的显著图融合模块。

 为 Sup1, Sup2, ..., Sup6 输出的显著图,
为 Sup1, Sup2, ..., Sup6 输出的显著图,
 的损失函数;
的损失函数;

 的损失函数;
的损失函数;
 为每个损失函数的权重。
为每个损失函数的权重。

 分别表示 GT 像素值和预测的显著概率图。
分别表示 GT 像素值和预测的显著概率图。

python u2net_portrait_test.py
br



更多精彩推荐
![]()
点分享
![]()
点点赞
![]()
点在看



登录查看更多
相关内容
Arxiv
3+阅读 · 2018年8月20日



相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2018年8月20日