重磅!商汤开源Grid R-CNN Plus:相比Grid RCNN,速度更快,精度更高
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。点击文末“阅读原文”立刻申请入群~
TeddyZhang:上海大学研究生在读,研究方向是图像分类、目标检测以及人脸检测与识别
前几天,商汤科技开源了Grid R-CNN Plus的代码,相比Faster RCNN,有了很大的提高,今天在介绍Grid R-CNN Plus版本之前,先来回顾下原版的Grid RCNN的动机和创新,然后再看Plus版本是如何改进Grid RCNN的。

论文链接:
Grid RCNN: https://arxiv.org/abs/1811.12030
Grid RCNN Plus:
https://arxiv.org/abs/1906.05688
代码链接:
https://github.com/STVIR/Grid-R-CNN
回顾Grid R-CNN
算法总览
原版的Grid R-CNN的提出主要侧重于如何让最后的预测框更加的精准,最后的效果也非常的有效,相比于Faster R-CNN+FPN(ResNet50),其在COCO Benchmark的结果在IOU=0.8获得了4.1%AP提升,而在IOU=0.9获得了10.0%的AP提升。
在双阶段算法中,如FPN,RCNN系列、Cascade RCNN、Mask RCNN等算法都有一个共同的特点,就是边框定位模块是相同的。它们将边框定位视作一个回归分支,一般经过几个全连接层对输入的feature map进行预测偏差(proposal或者predefined anchor)。
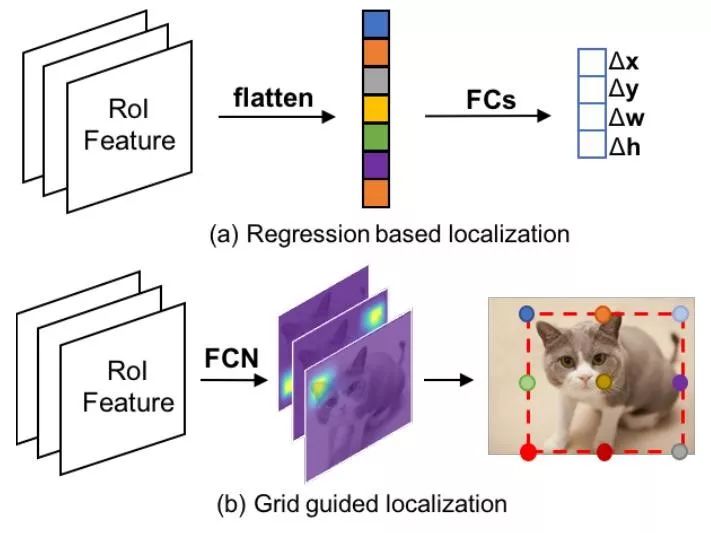
在Grid RCNN中,作者想要用一个全卷积层来代替FCs,以获取更加精确地空间表达。首先,将目标的边框区域分成网格,然后送入FCN中预测相应的网格点的位置,如上图猫咪的9个点。由于全卷积的架构对物体位置敏感是成比例的,所以网格点的位置可以在像素级别来获取。这样,相比之前的回归算法,网络就可以获得更多更精确的空间信息。
但是由于点位置的预测和局部特征没有直接的关系,比如猫咪左上角的点和其相邻的只包含背景的区域拥有类似的特征,这就会增加检测难度。为了解决这个问题,作者设计了一个多点监督的公式,通过在一个网格中定义目标点,可以获得更多信息来减少一些点检测不准确的影响。比如猫咪右上角的点可能不准确,可以通过刚好位于边界的上中点进行监督校准。除此之外,为了充分利用网格点的信息,提出了一种信息融合的策略。具体来说,对于一个网格点来说,其相邻的特征图都会被收集并融合成一个特征图,这个融合后的特征图用于相应网格点的预测,从而使得这个网格点的位置更加精准。
总的来说,有以下三点contributions:
提出使用FCN来保留更多空间信息,相比于使用全连接层,也是第一个像素级定位目标的双阶段算法
使用多点监督的方式来避免某些点预测不准确,还提出了网格点相邻特征图信息融合的方式来联合监督点的位置,从而得到更精确的位置。
相比于之前的全连接层的方式进行位置标定,这是一种更好,更严格的网格监督的定位方式,特别对于现在COCO竞赛中要求的IOU=0.75以上。
与CornerNet的比较
CornerNet是一个用成对的关键点来确定目标边框位置的单阶段算法,他是一个bottom-up的设计方式,也就是说首先检测出来所有的边框关键点,然后进行分组从而对目标的边框进行定位。而Grid RCNN和它是不一样的思路,其是一个top-town的two stage的方式,首先在第一阶段确定了目标的大致区域,即regionproposals。接着,Grid RCNN主要的关注点是如何更加精确的定位目标的关键点,从而提出了grid points locations。
GridGuided Localization
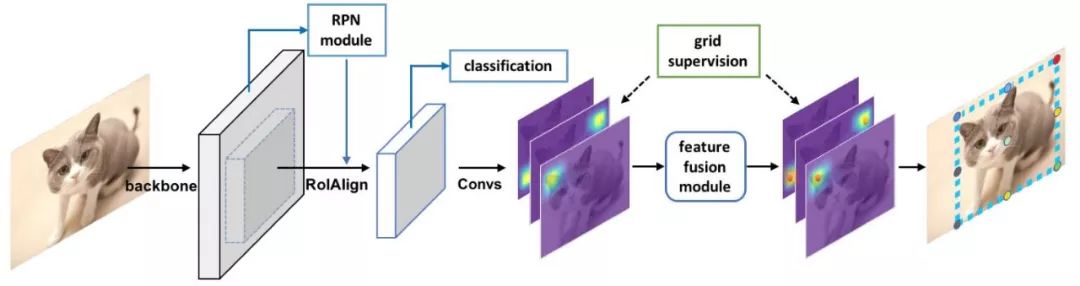
在图中为一个3x3的网格点的形式,包括四个角点、四个边的中点以及中心点。每个region proposal由ROI Align生成,固定尺寸为14x14,接着经过8个带dilation操作的空洞卷积用来增加感受野,然后再使用2个反卷积操作使特征图尺寸为56x56。因此每个检测分支都会输出一个尺寸为56x56的heatmap,逐像素的进行Sigmoid函数操作后获得相应的概率图,并且每个heatmap都有一个对应的监督图,也就是groundtruth map,这个真实图的每个grid point的真实位置用一个5像素的十字进行标记。
使用如下公式将heatmap中Gridpoint的位置(

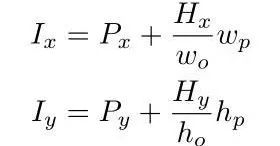
其中p和o分别代表region proposal和heatmap。
然后我们假设一个边框的四个坐标为,这个就感觉有点像CornerNet的坐标定义了,怪不得要专门对比一下这两个网络的区别。但是由于分成了9个grid points,可能在进行预测时,原本处于同一水平线的点不在同一水平线,因此取平均值消除误差影响。
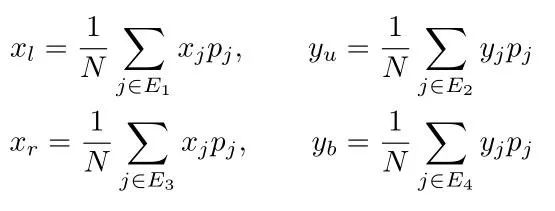
假设我们要图上猫咪的预测边框B中的,那么猫咪上方有三个点,对其进行概率加成求和后取平均就可以得到我们的回归对象.
Grid Points Feature Fusion
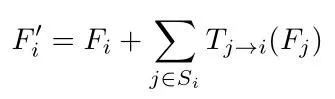
由于网格点具有内部相关性,因此可以相互之间进行校准,从而减少整体偏移,因此作者设计一个空间信息融合模块来代替原来直接求平均的方法,后者导致很多特征图信息没有使用。
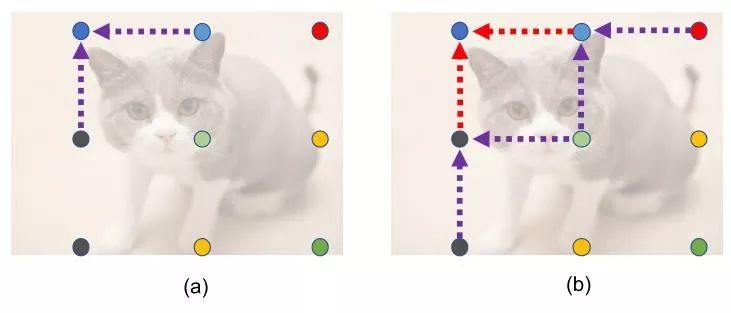
上图为网格点特征融合的结构,图b为GridRCNN的关键点信息传播方向,为了可以分辨不同点的feature map,我们使用NxN组卷积和对最后一个特征图提取特征,因此每个特征图都很明确对应一个gridpoint。对应每一个grid point,与这个点距离1个单位网格长度的点叫做源点,并定义第i个grid point为 
ExtendedRegion Mapping
由于全卷积层的特性,最后输出的heatmap的空间信息很自然的与原始图像所产生的region proposal相关,但是一个region proposal并不一定包含整个目标,也就是说一些真实框的grid points可能在region proposal外部,因此不能再监督图上进行标注。
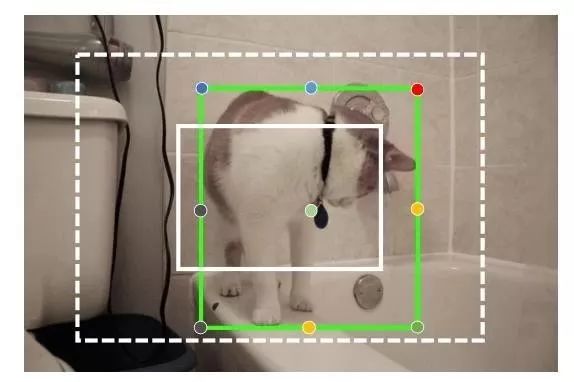
如上图,小的白色的可能是通过RPN+ROI Align产生的region proposal,很明显,没有包含其grid points,这样就会使训练过程效率非常低。
因此,一个自然的想法就是扩大这个proposal区域,这个区域可以包含大多数的grid points,但是这样也会引入一些无效的背景区域或者其他的目标,经过试验测试,这种策略没有收益却损害了小目标的精度。
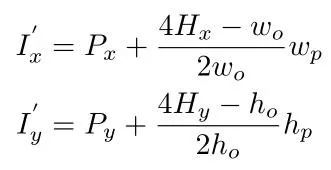
为了解决这个问题,我们修改了输入heatmaps和原始图区域的对应关系,如下公式所示,这样就可以得到上图最大的那个dashed box。注意,只有IOU大于0.5的region proposal才可以进入到Grid branch。
实验结果
对比实验
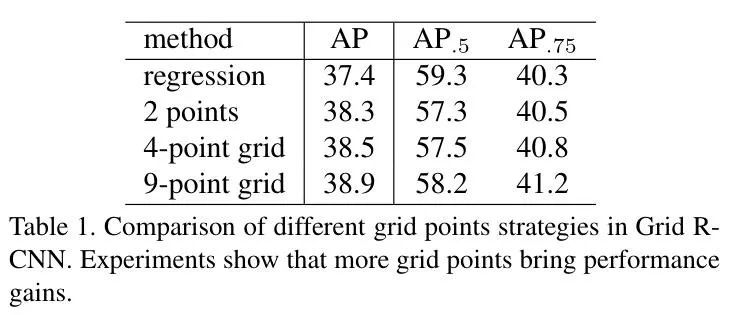
1. 多点监督策略
对比了传统的回归算法,在2-point使用真实框的左上角和右下角的点,在4-point中增加了另外两个角点的监督,9-point就是论文示例中的普通3x3grid。其最后的结果显示,越多的grid point监督效果越好。
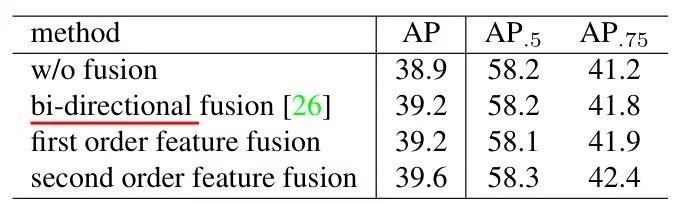
2. 网格点特征融合策略
对比的baseline为没有进行网格点融合的形式,first order是进行了一阶融合,second order是在一阶融合的基础上增加了二阶融合的措施。特别的,可以看到这种策略对于AP.75的影响要大于AP.5,这说明特征融合策略对于边框定位准确度十分有效。
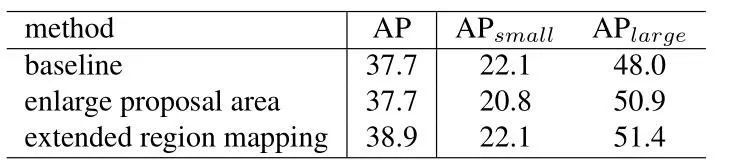
3. 增大区域映射
对比了没有做任何措施、直接扩大region proposal以及使用该表映射关系的方法,可以看到直接扩大region proposal虽然对大物体检测区域有提高,但由于引入了背景和其他目标,对小目标的检测却十分不利。
4. 对比COCO不同IOU阈值的结果
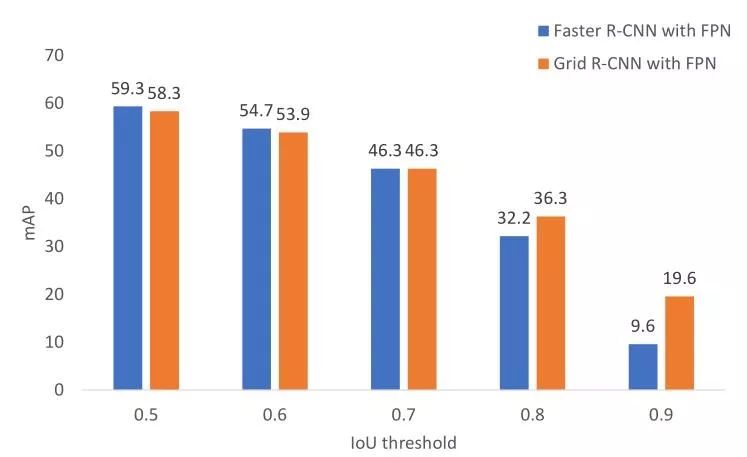
从上图可以很容易看出,Grid RCNN不改变网络结构,只是通过改变最后回归分支的结果和方法,从而达到了很精确的边框定位。虽然在IOU 0.5阈值下略有下降,但这个思路值得学习,特别追求IOU阈值比较精准的任务中。
提升Grid R-CNN Plus
虽然原版的Grid R-CNN对FasterRCNN做了很多精度上的优化,但是速度却慢于Faster RCNN,于是作者就其进行改进并进行了开源,开源地址见开头!Res50+FPN作为主干网络的Grid R-CNN Plus达到了40.4%的AP,相比FasterRCNN,精度增长了3.0%,速度却几乎相同。
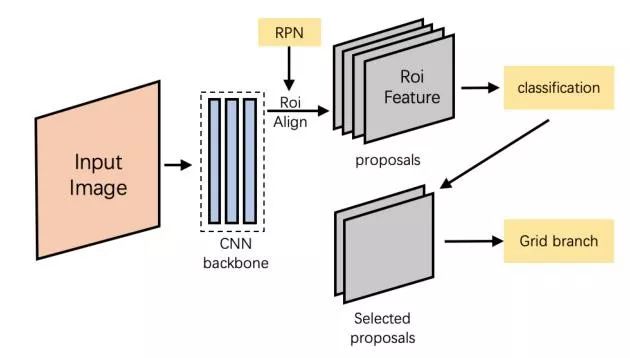
算法总览
GridPoint Specific Representation Region
对于Grid RCNN Plus来说,最大的提升就是网格点的特征表达区域,由于只有正样本(IOU>0.5)才会被送入Grid branch,因此有些真实标签会被限制在监督图的一个小区域内。如下图所示:
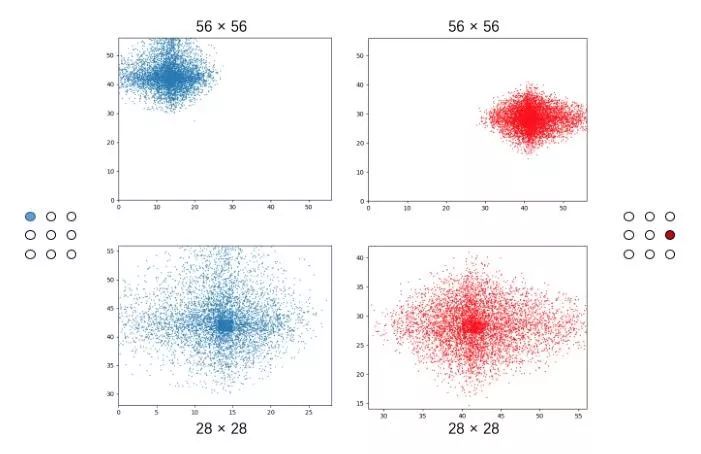
在一个3x3的grid point中,真实标签只会出现在监督热图的左上方区域,但这样是不对的,对于一个物体来说,它的所有的grid points共享一个相同的特征表达区域。为了解决这个特征表达区域的问题,首先,将grid branch的输入尺度从原来的56x56降低为28x28,对于每个grid point,新的输出代表了原来大概四分之一的区域。经过这样处理后,每个grid point的表达可以近似的视为一个归一化的过程。
LightGrid Head
由于最后的输出尺度降低了一半,那我们可以同时将grid branch中的其他特征图分辨率也降低,比如14x14到7x7。细节来说,通过前面的RPN+ROIAlign产生一个固定的feature map 14x14,接着使用一个步长为2的3x3卷积核,然后再使用7个步长为1的3x3卷积核从而产生7x7分辨率的特征图。紧接着我们将这个特征分成N组(默认为9),每一组关联一个grid point,接着使用两个组反卷积将特征图尺度变为28x28,注意group deconvolution可以加速上采样的过程。
另外一个好处是,由于我们对每个grid point的表达进行了归一化,因此他们变得更加closer,导致在特征融合时不需要使用很多的卷积层来覆盖这个间隙。在Plus版本,只使用了一个5x5 depth-wise卷积层来代替原来的3个连续的卷积层。
Image-acrossSample Strategy
由于grid branch在训练时只使用正样本,所以不同采样batch正样本数量的不同会对于精度产生影响,比如,有些图像的正样本很多,但有些图像的正样本数很少。在Plus版本,作者使用了跨图片的采样策略,具体讲,从两个图片中一共采集192个positive proposal,而不再是每张图片采集96个positive proposal。这样就会使训练更具有鲁棒性以及精度提高。
NMS Only Once
原来的Grid RCNN需要两次NMS,第一次是proposal的生成,只选择Top 125个样本进行边框矫正,第二次是做最后的classification,作者发现,尽管只是一小部分的proposal,进行80类的NMS还是很慢,所以在Plus版本,直接移除了第二个NMS,同时将第一个NMS的IOU阈值设置为0.3,分类阈值设置为0.03,只选择100个proposal进行进一步的分类和回归。
实验结果
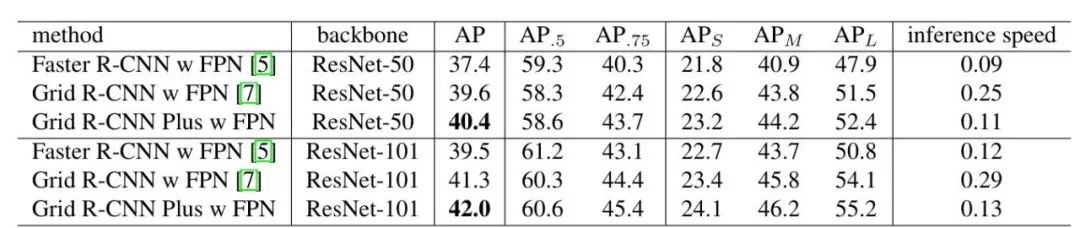
可以看到,Plus版本更快,更好,这些策略还是值得学习,研究的!
*延伸阅读
CenterNet:目标即点(代码已开源)
中科院牛津华为诺亚提出:CenterNet,One-stage目标检测最强算法!可达47mAP,已开源!
重磅!13篇基于Anchor free的目标检测方法
如何看待 CVPR2019 论文 Libra R-CNN(一个全面平衡的目标检测器)?
点击左下角“阅读原文”,即可申请加入极市目标跟踪、目标检测、工业检测、人脸方向、视觉竞赛等技术交流群,更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

△长按关注极市平台
觉得有用麻烦给个好看啦~




