干货 | OpenCV中KLT光流跟踪原理详解与代码演示
由极市、机器之心和中科创达联合举办的“2018计算机视觉最具潜力开发者榜单”评选活动,现已接受报名,杨强教授、俞扬教授等大牛嘉宾亲自评审,高通、中科创达、微众银行等大力支持,丰厚奖励,丰富资源,千万渠道,助力您的计算机视觉工程化能力认证,提升个人价值及算法变现。极市与您一起定义自己,发现未来~点击阅读原文即可报名~
来源:OpenCV学堂
稀疏光流跟踪(KLT)详解
在视频移动对象跟踪中,稀疏光流跟踪是一种经典的对象跟踪算法,可以绘制运动对象的跟踪轨迹与运行方向,是一种简单、实时高效的跟踪算法,这个算法最早是有Bruce D. Lucas and Takeo Kanade两位作者提出来的,所以又被称为KLT。KLT算法工作有三个假设前提条件:
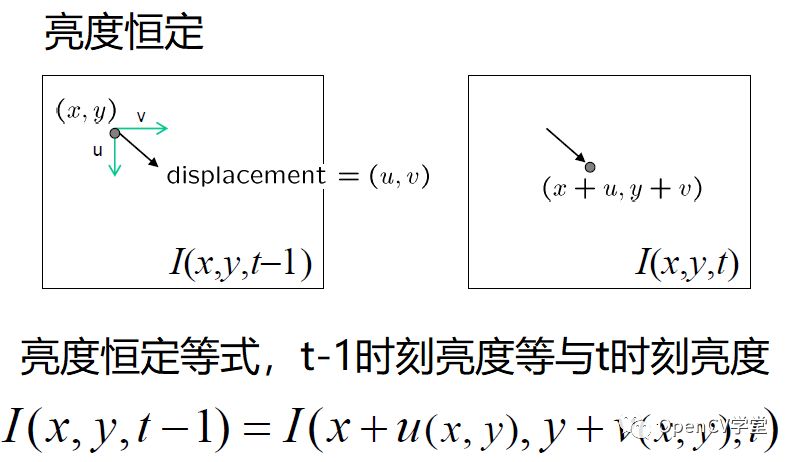
亮度恒定
短距离移动
空间一致性
亮度恒定
对象中任意像素点p(x,y)亮度值,在t-1时候的值,在t时刻移动(u, v)之后亮度值保持不变
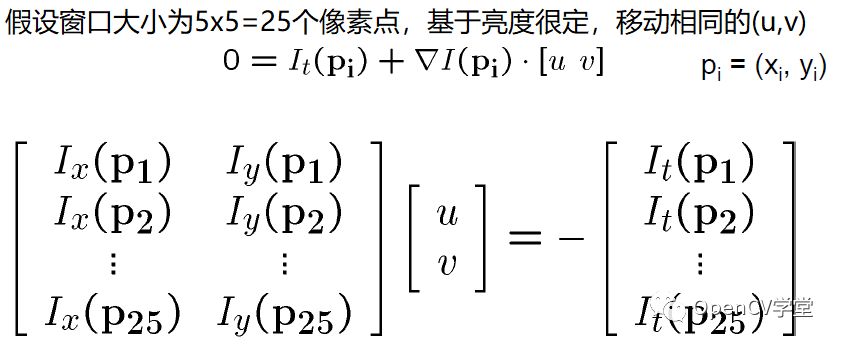
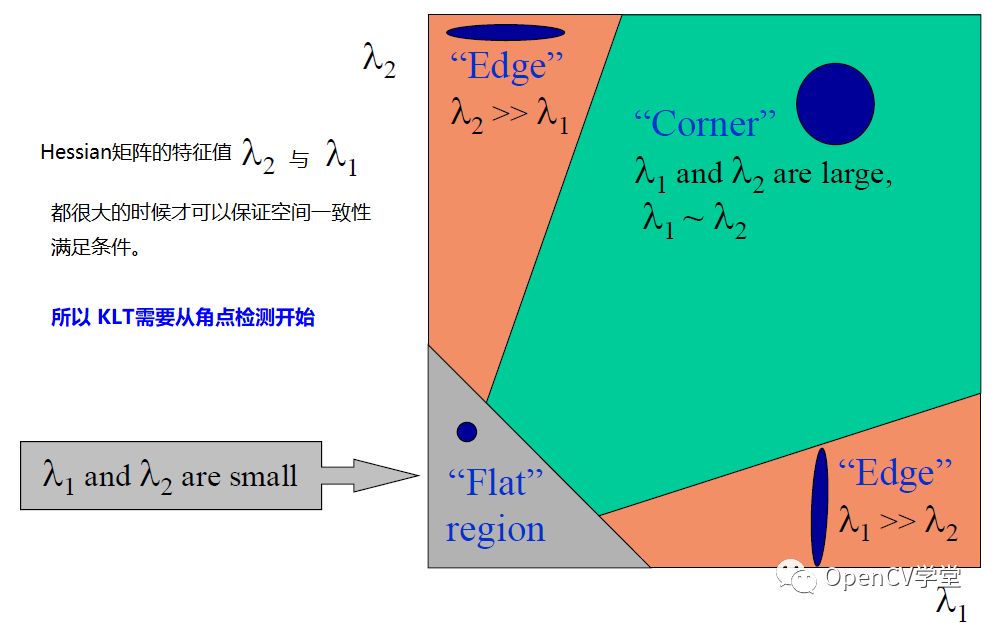
空间一致性
假设对像素点p(x, y)来说,周围的像素点都保持相同的移动距离(u, v) 假设窗口大小为5x5,则对于25个窗口内的像素点来说,就会如下等式成立:
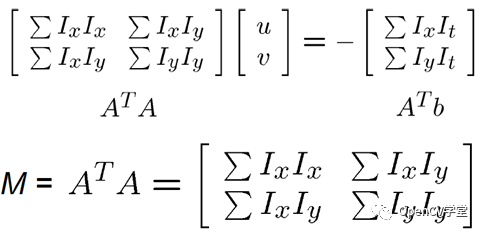
得到下面的过约束等式,根据最小二乘可以求解(u, v):
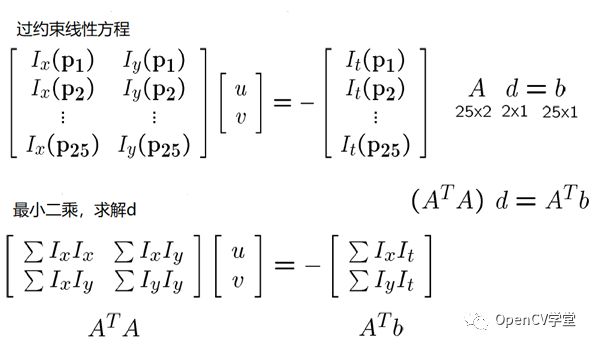
这样我们就得到了KLT光流等式与该窗口的的Hessian矩阵
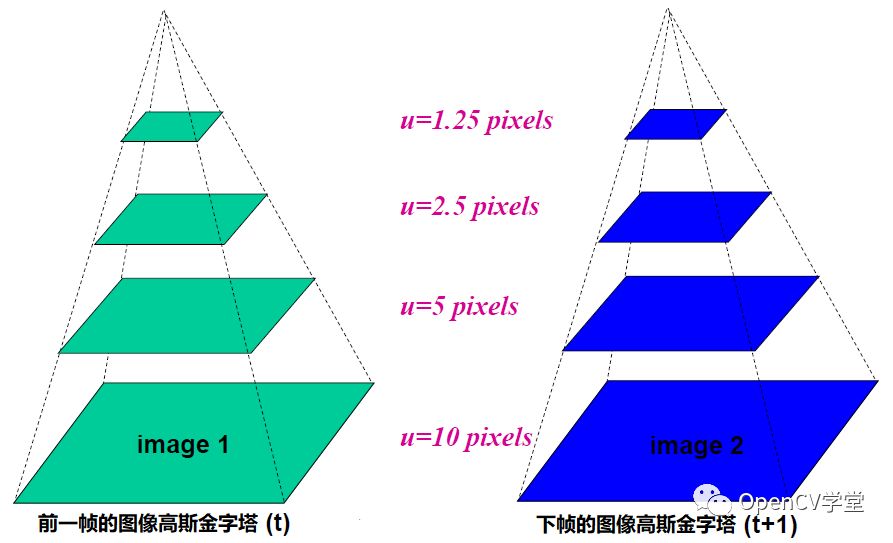
空间尺度不变性
通过建立每一帧的图像金字塔,实现尺度空间窗口目标对象搜索
OpenCV中KLT演示代码实现
OpenCV中KLT算法API及其参数解释如下:
void cv::calcOpticalFlowPyrLK(
InputArray prevImg, // 前一帧图像
InputArray nextImg, // 后一帧图像
InputArray prevPts, // 前一帧的稀疏光流点
InputOutputArray nextPts, // 后一帧光流点
OutputArray status, // 输出状态,1 表示正常该点保留,否则丢弃
OutputArray err, // 表示错误
Size winSize = Size(21, 21), // 光流法对象窗口大小
int maxLevel = 3, // 金字塔层数,0表示只检测当前图像,不构建金字塔图像
TermCriteria criteria = TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 0.01), // 窗口搜索时候停止条件
int flags = 0, // 操作标志
double minEigThreshold = 1e-4 // 最小特征值响应,低于最小值不做处理
)
特征点检测与绘制的代码实现如下:
// detect first frame and find corners in it
Mat old_frame, old_gray;
capture.read(old_frame);
cvtColor(old_frame, old_gray, COLOR_BGR2GRAY);
goodFeaturesToTrack(old_gray, featurePoints, maxCorners, qualityLevel, minDistance, Mat(), blockSize, useHarrisDetector, k);
特征点绘制
void draw_goodFeatures(Mat &image, vector<Point2f> goodFeatures) {
for (size_t t = 0; t < goodFeatures.size(); t++) {
circle(image, goodFeatures[t], 2, Scalar(0, 255, 0), 2, 8, 0);
}
}
KLT跟踪代码如下
TermCriteria criteria = TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 30, 0.01);
double derivlambda = 0.5;
int flags = 0;
bool ret = capture.read(frame);
if (!ret) break;
imshow("frame", frame);
roi.x = 0;
frame.copyTo(result(roi));
cvtColor(frame, gray, COLOR_BGR2GRAY);
// calculate optical flow
calcOpticalFlowPyrLK(old_gray, gray, pts[0], pts[1], status, err, Size(31, 31), 3, criteria, derivlambda, flags);
特征点状态检查与匹配的代码如下
size_t i, k;
for (i = k = 0; i < pts[1].size(); i++)
{
// 距离与状态测量
double dist = abs(pts[0][i].x - pts[1][i].x) + abs(pts[0][i].y - pts[1][i].y);
if (status[i] && dist > 2) {
pts[0][k] = pts[0][i];
initPoints[k] = initPoints[i];
pts[1][k++] = pts[1][i];
circle(frame, pts[1][i], 3, Scalar(0, 255, 0), -1, 8);
}
}
// resize 有用特征点
pts[1].resize(k);
pts[0].resize(k);
initPoints.resize(k);
绘制跟踪轨迹的代码如下
// 绘制跟踪轨迹
draw_lines(frame, initPoints, pts[1]);
该方法实现如下:
void draw_lines(Mat &image, vector<Point2f> pt1, vector<Point2f> pt2) {
if (color_lut.size() < pt1.size()) {
for (size_t t = 0; t < pt1.size(); t++) {
color_lut.push_back(Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)));
}
}
for (size_t t = 0; t < pt1.size(); t++) {
line(image, pt1[t], pt2[t], color_lut[t], 2, 8, 0);
}
}
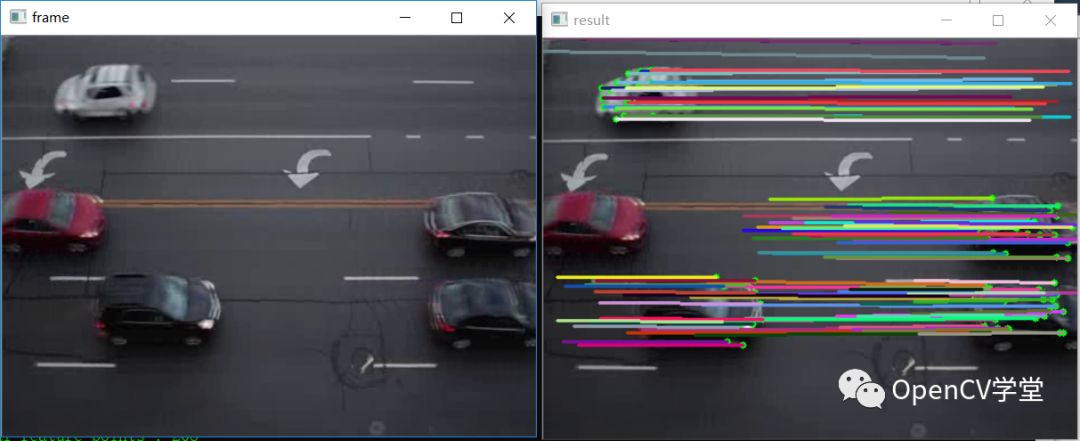
运行效果
左侧是视频的原始每一帧、右侧视频是每一帧中KLT算法实时轨迹绘制
车辆运行轨迹跟踪
*推荐阅读*
多目标追踪器:用 OpenCV 实现多目标追踪(C++/Python)
用OpenCV实现八种不同的目标跟踪算法
杨强教授、俞扬教授等大牛嘉宾评审团,万元大奖,丰富资源,助力您的计算机视觉工程化能力认证,点击阅读原文即可报名“2018计算机视觉最具潜力开发者榜单”~






