现实版 T-bag 机械手来了。意大利技术研究院创造类似人手的手部假肢,相关研究登上了最新一期 Science Robotics 封面。
还记得美剧《越狱》里的著名角色 T-bag 吗?在第二季里他被人砍了手,从此实力大减。在回归的第五季,有人为了让他能够更好地执行任务,帮他装了一个全功能的机械手。
![]()
我们已经见证过越来越多科幻电影里的内容成真,而这一次我们只等了三年。在昨天刚刚刊发的 Science 子刊《Science Robotics》上,具有和人手同等能力的机械手登上了封面。
![]()
该研究创造出来的机械手「Hannes」与人手极为相似,能够执行许多日常动作,比如擦桌子:
![]()
![]()
![]()
它还具备很强的适应性,可以抓握住递给它的任何物体,甚至刁钻的角度也难不倒它。比如把易拉罐的底部递到这只「手」上,它依然可以轻松握住瓶底,并在对方试图拿走时松开手:
![]()
能够实现类似人手的功能并非易事,现在我们就来了解它的原理和构造。
用具有同等能力和效果的人工装置替代人手是一项长期挑战。即使是具备多自由度的最先进手部假肢,也无法达到人手的复杂性、灵活性和适应性。因此,假肢被用户放弃的比率很高。
最近,意大利技术研究院创造了一种叫做「Hannes」的手部假肢,它融合了关键的仿生特性,因而与人类的手极为相似。通过整体设计方法以及研究人员、患者、整形外科医师和工业设计师的共同开发工作,「Hannes」可同时实现精准拟人、仿生性能以及类似人的抓握行为,性能超过日常生活活动(ADL)所需。
为了评估 Hannes 的有效性和可用性,研究人员在截肢患者身上进行了试验。在为期大约 2 周的试验前后分别进行了测试和问卷调查,结果表明截肢患者可以自主使用 Hannes 在家中进行日常生活操作。研究者还通过实验验证了 Hannes 的高性能和类似人类的抓取行为。尽管 Hannes 的速度仍然低于人手,但实验表明,与现有的研究或商用设备相比,Hannes 的性能有所提升。
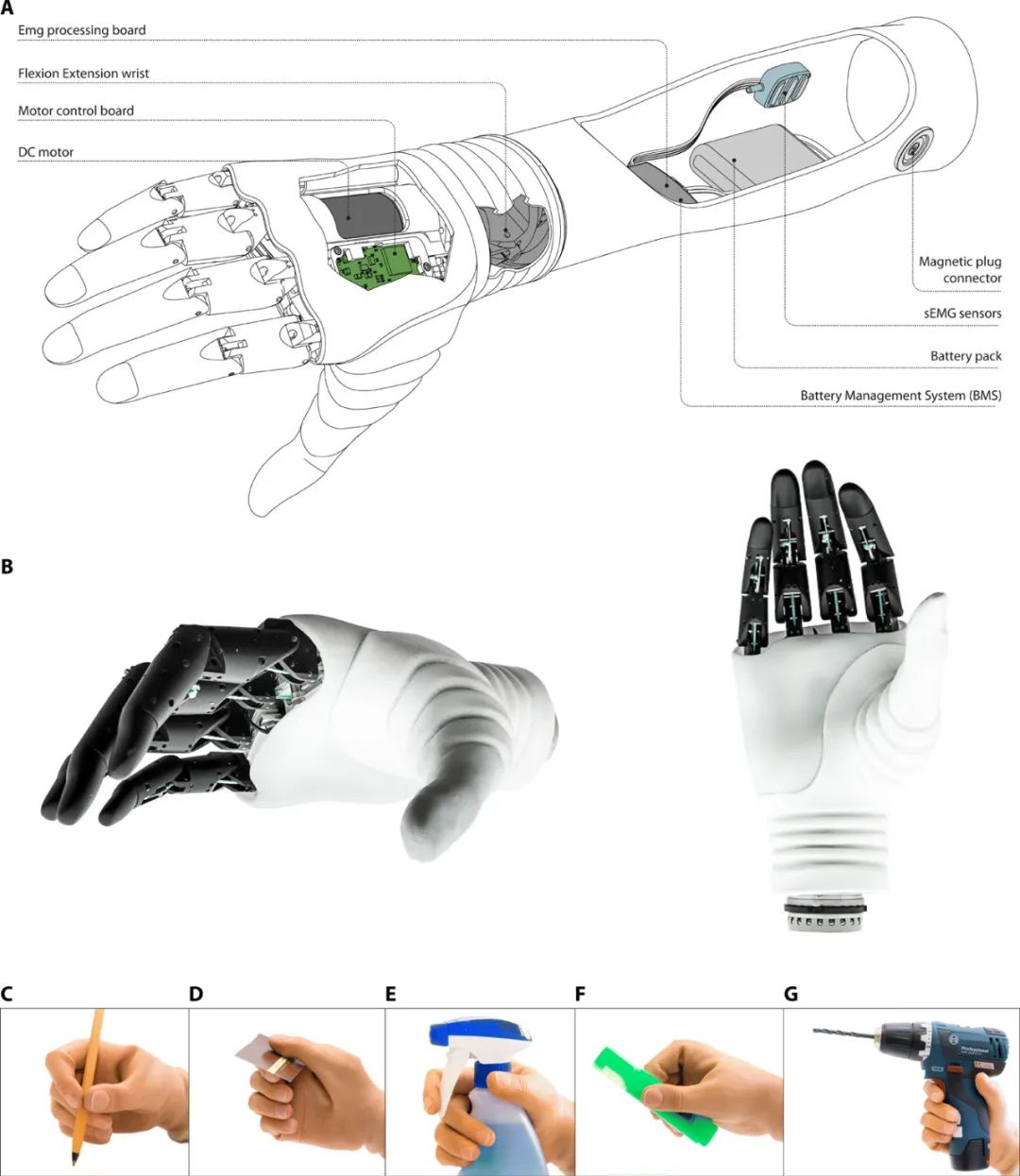
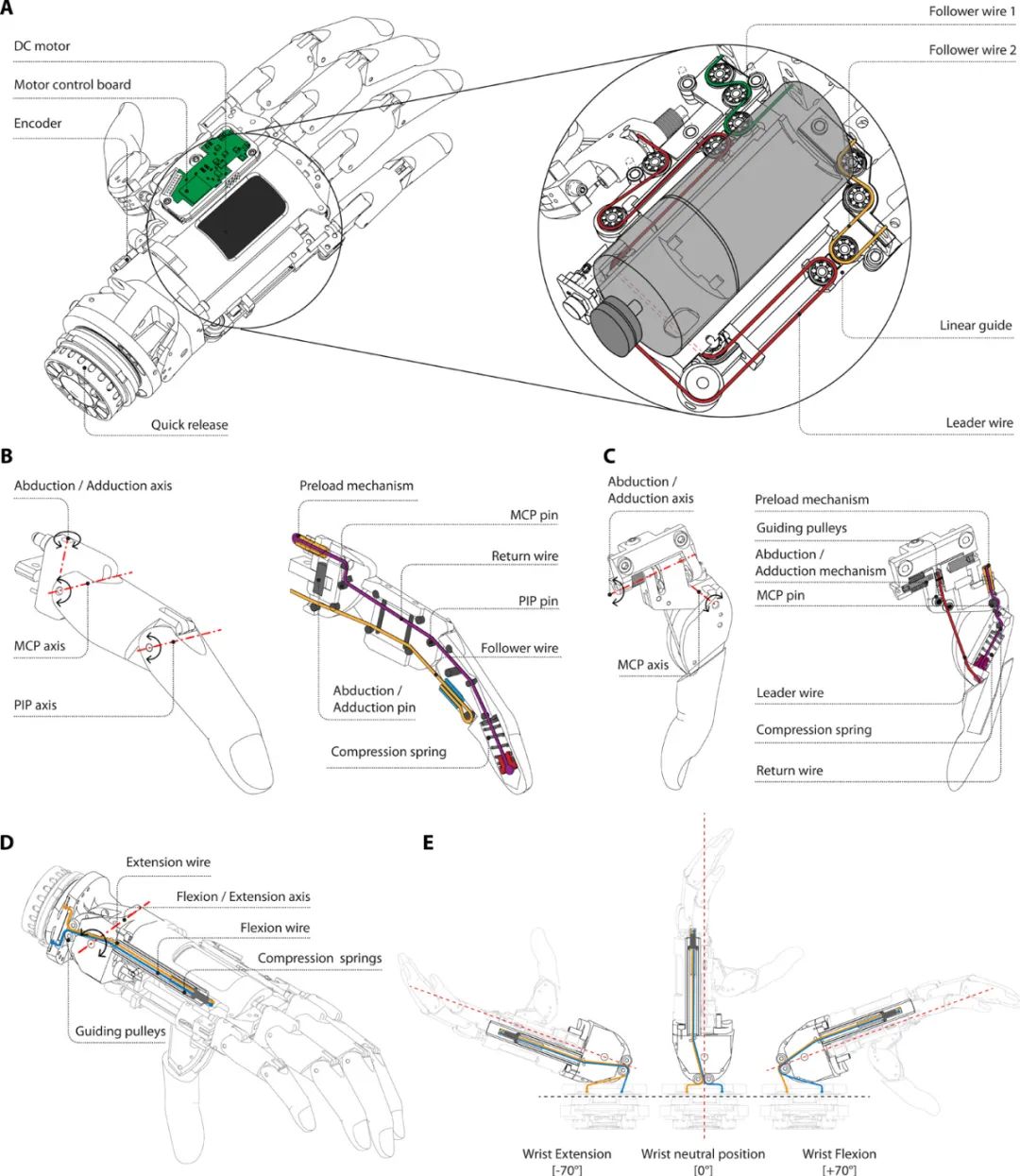
Hannes 主要由三个相互作用的物理部件组成:肌电多关节假肢手,由差动欠驱动装置实现;被动屈伸(F/E)腕关节模块;肌电接口 / 控制器,包括两个表面肌电图 (sEMG) 传感器、电池组和控制电路。如图 1A 所示:
![]()
图 1:Hannes 系统概览。A,Hannes 架构;B,未被手套覆盖的 Hannes 外观;C-G,Hannes 执行日常生活动作。
![]()
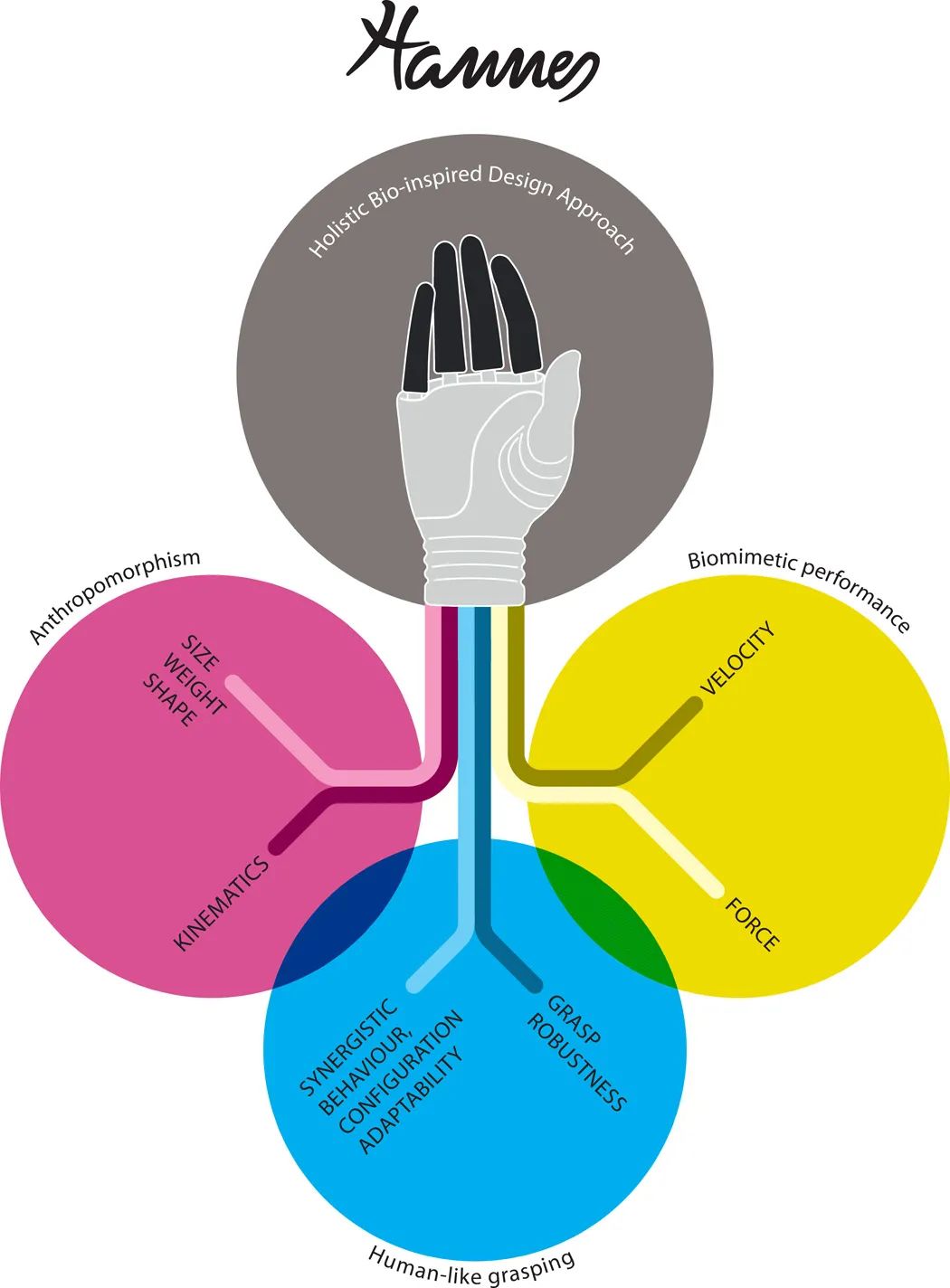
这三个组件旨在实现拟人化、仿生性能和类人抓取,而这三个特性在以往的研究中被证明是决定假肢整体效果的关键。这些特性已通过整体仿生设计方法得到实现,参见下图 2:
![]()
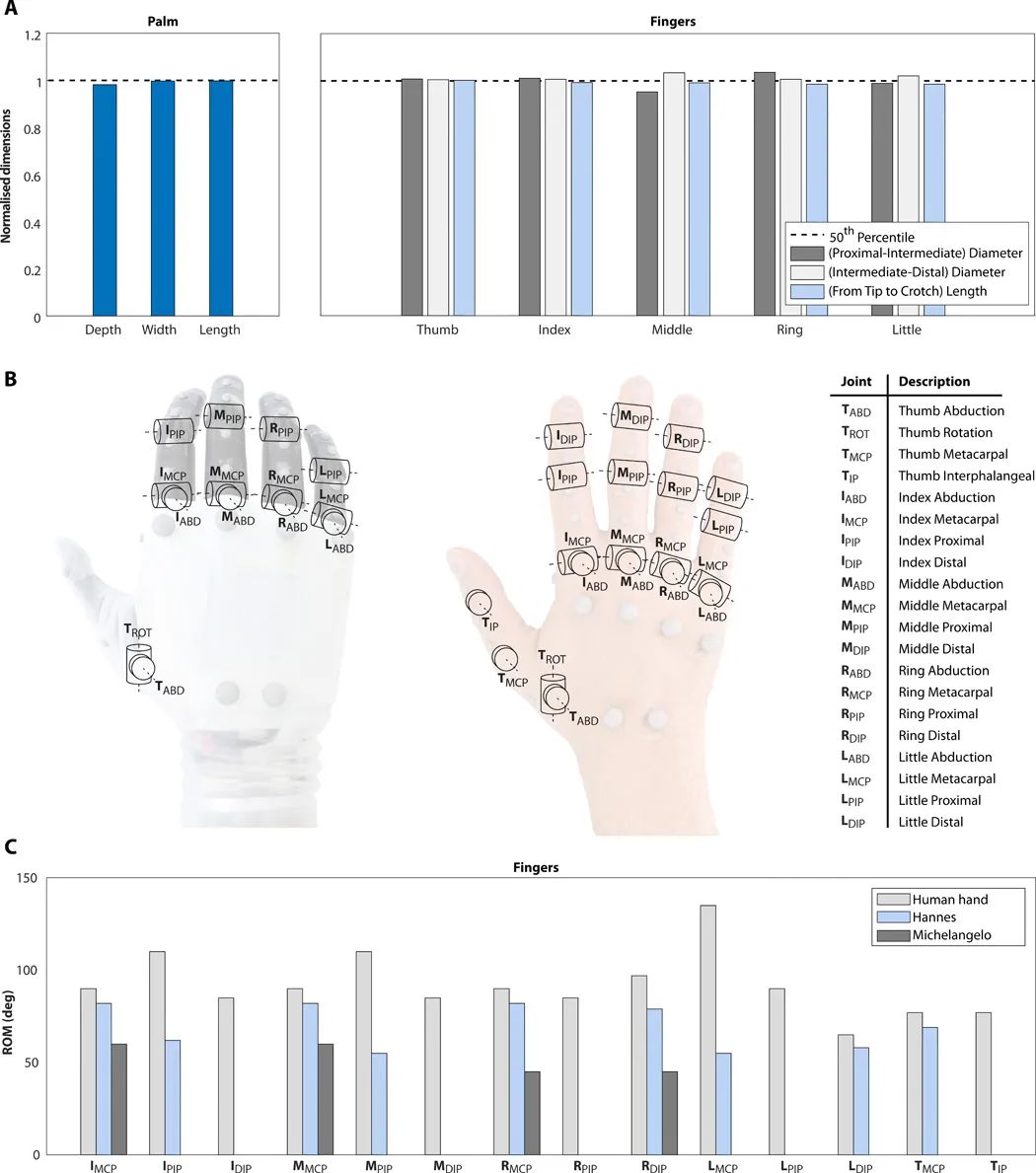
图 3A 显示了 Hannes 的高度拟人化:中指中近端直径的最大差异为 4.8%,与参考手模型极为相似。关于运动学,图 3B 表明除远端指间(DIP)关节外的所有手指自由度均已实现,为了实现在功能和复杂性之间的权衡,DIP 关节被省略并设置为固定角度。拇指的运动学情况有所不同,指间关节(IP)和掌指关节(MCP)被锁定。
![]()
为了进行全面的比较,图 3C 展示了 Hannes 自由度与人手和 Michelangelo 假肢相比的角度偏移(Michelangelo 假肢与其他现有假肢相比拟人化程度更高,被用作黄金标准)。除了锁定 DIP 关节外,Hannes 的关节活动度(ROM)大体上接近人手,并且比 Michelangelo 假肢的 ROM 更具仿生性。
Hannes 另一个重要的组成部分是手近端的被动屈伸腕关节。该模块基于相互作用力自然地进行腕部屈伸,并且能够实现抓握的鲁棒性和对任务的适应性。
![]()
关于控制和接口,出于可靠性、鲁棒性和实用性的考虑,研究者决定采用直接 EMG 控制,将上述属性的实现留给高级硬件设计来解决。
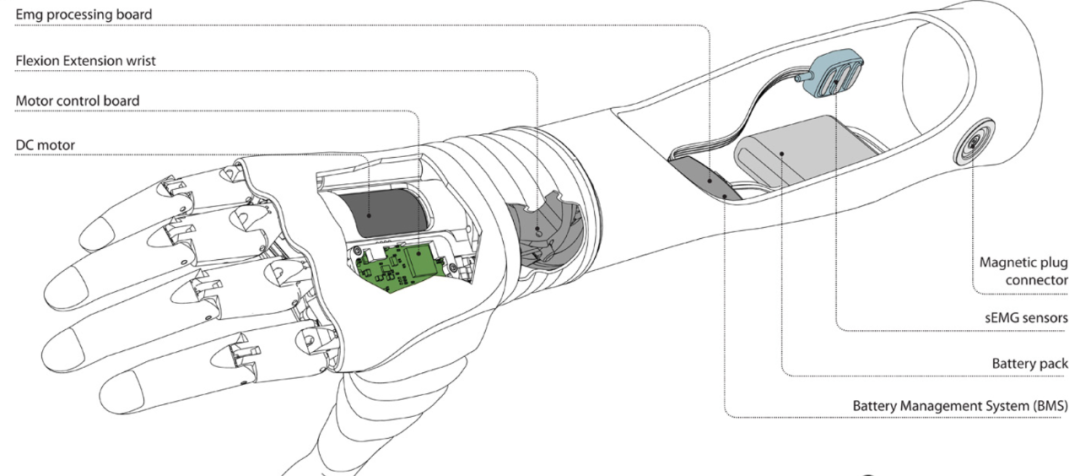
两个 sEMG 传感器用于检测截肢患者的残肢肌肉活动情况,即前臂屈肌和伸肌的肌肉收缩,它们分别用于关闭和打开设备并对设备进行控制。这两个 sEMG 传感器被放置在插槽内,并通过嵌入在「EMG 处理板」(EMG processing board)中的调节控制模块与 Hannes 手连接,它可以返回控制信号,并将其发送至「电机控制板」(motor control board)模块。
![]()
Hannes 系统由一个电池组进行供电,续航时间为 1 天。在不使用系统时,使用磁性插头可以为电池充电。该系统使用的控制器中存在一种比例关系,即它向 Hannes 手发送速度参考值,速度参考值会随着肌肉的活力成比例增加。该系统能够针对每个使用者调整控制参数,以精细控制每个患者所用设备的动作和力量。
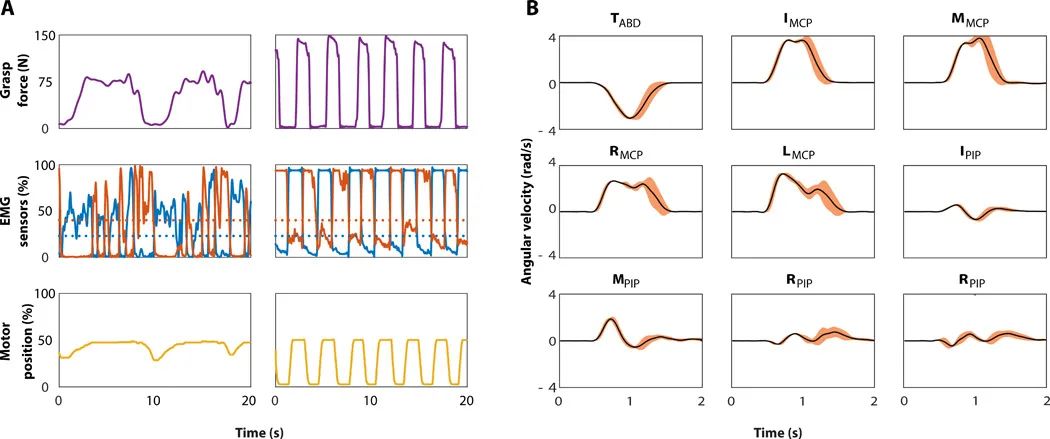
实验评估的结果表明:Hannes 能够满足前面提到的要求。拟人程度主要和设计相关,于是该研究通过实验评估了另外两个特性:仿生性能和类人抓握行为。
![]()
上图显示,掌指关节(MCP)的速度峰值可达 4 rad/s (229°/s),而近端指间关节(PIP)的速度峰值约为该值的一半。Hannes 能够在不到 1 秒的时间内实现完全闭合。
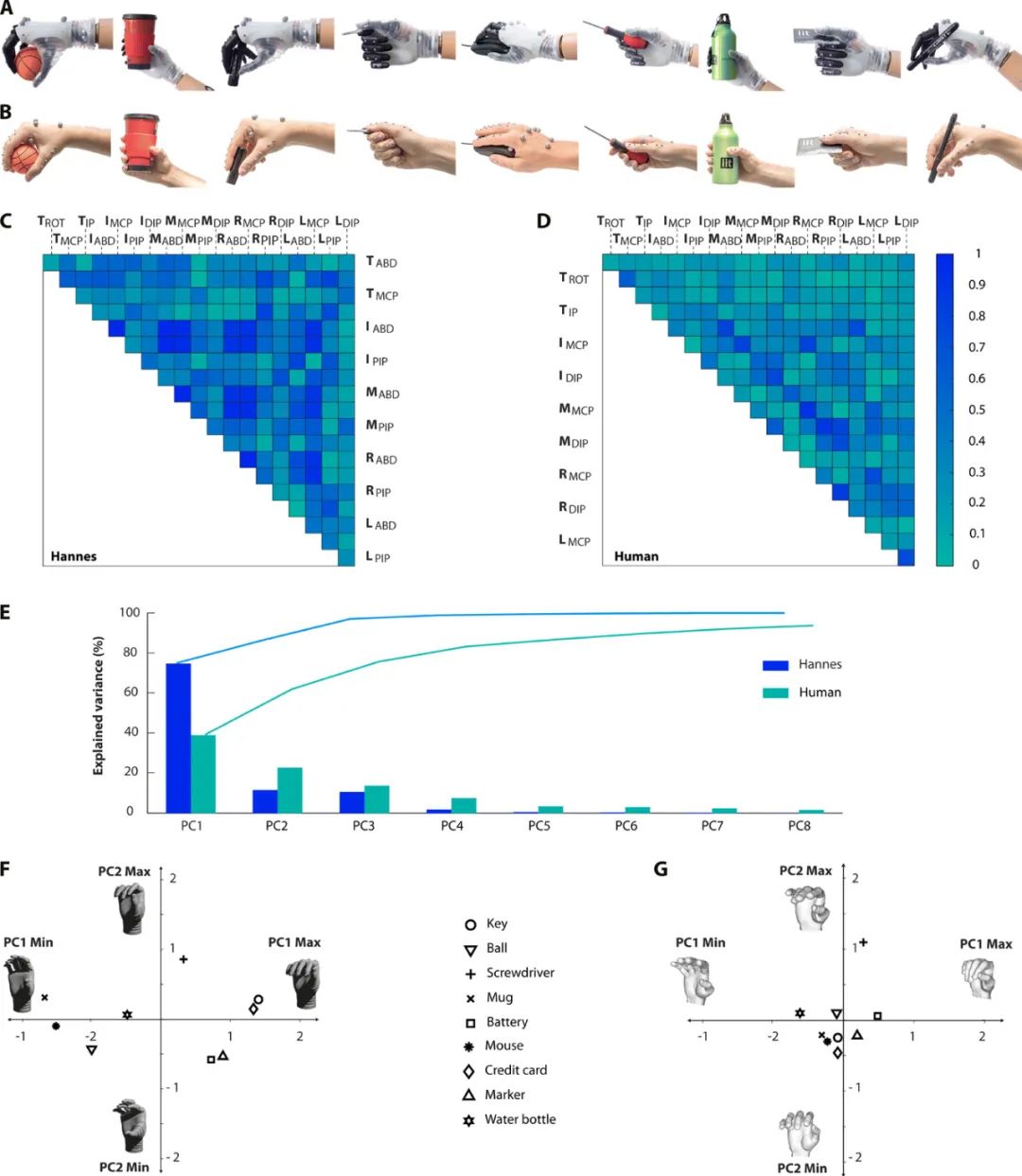
为了确定 Hannes 与人手协同运动行为的相似程度,该研究进行了运动学分析。
图 5 (C) 和 (D) 分别展示了在握住图 5 (A) 和图 5 (B) 中的物体时,Hannes 和人手关节角度的 Pearson 相关性。
![]()
![]()
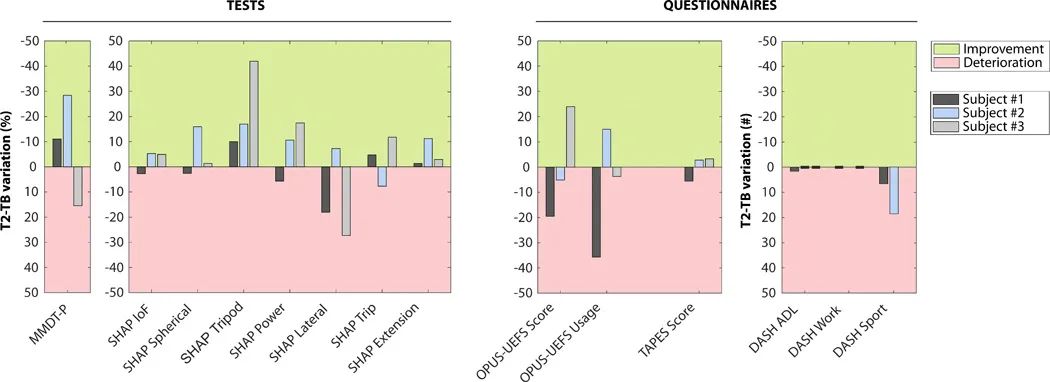
此外,该研究还在截肢患者身上进行了临床试验,并在试验前后分别做了测试和问卷调查。下图总结了测试和问卷调查分数的变化情况。
![]()
参考链接:https://robotics.sciencemag.org/content/5/46/eabb0467
如何根据任务需求搭配恰当类型的数据库?
在AWS推出的白皮书《进入专用数据库时代》中,介绍了8种数据库类型:关系、键值、文档、内存中、关系图、时间序列、分类账、领域宽列,并逐一分析了每种类型的优势、挑战与主要使用案例。
点击阅读原文或识别二维码,申请免费获取白皮书。
![]()
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com