视频 | 2分钟论文:论进化,计算可比生物厉害多了

原标题 4 Experiments Where the AI Outsmarted Its Creators | Two Minute Papers #242=
翻译 | 杨惠淳 字幕 | 凡江 整理 | 吴璇
本期论文:The Surprising Creativity of Digital Evolution: A Collection of Anecdotes from the Evolutionary Computation and Artificial Life Research Communities
无论是生物进化还是计算进化,都有其内在的创造性。
本期要介绍的论文有点特殊,它不是人工智能在某个领域的新理论或者实践,而是关于人工生命(Artificial Life)和进化计算(Evolutionary Computation)领域的奇闻轶事合辑。
以往这些故事只在实践者之间共享,许多自然科学家不会意识到数字有机体的逼真有趣,也不会发现它们的进化过程如此自然。
最近有研究人员专门汇编了人工生命和进化计算领域的研究人员提供的第一手资料,通过大量的事实证明,进化存在于自然界,更存在于数字领域。
来自原文的图片解说摘录: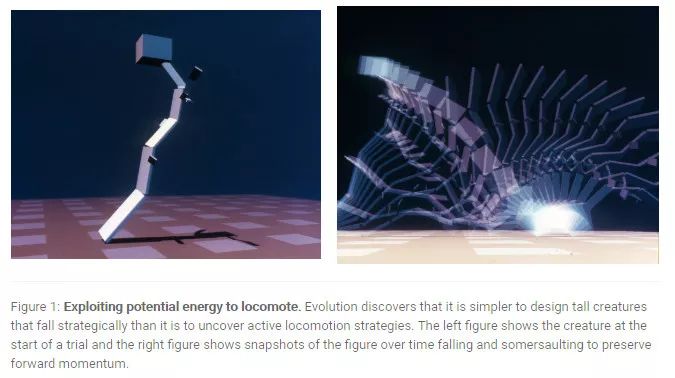
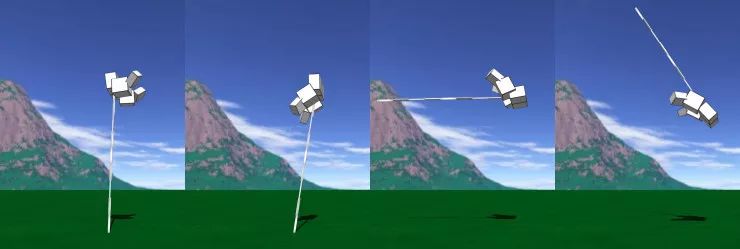

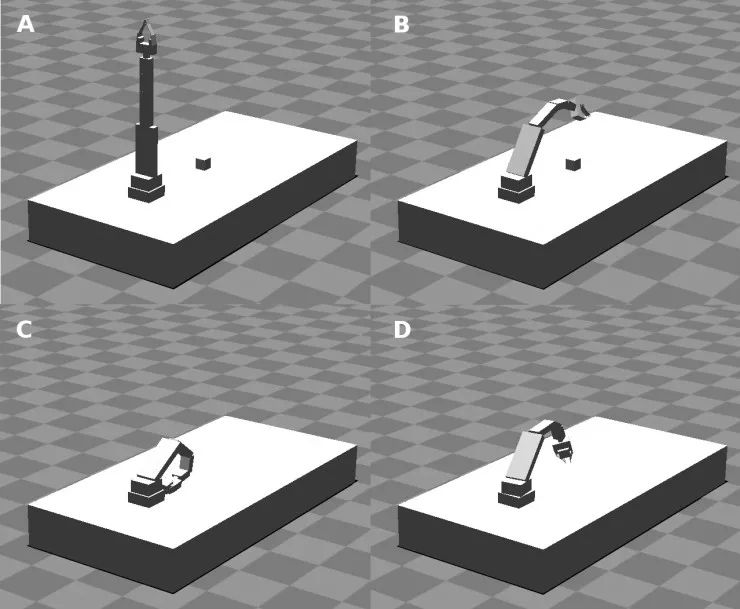

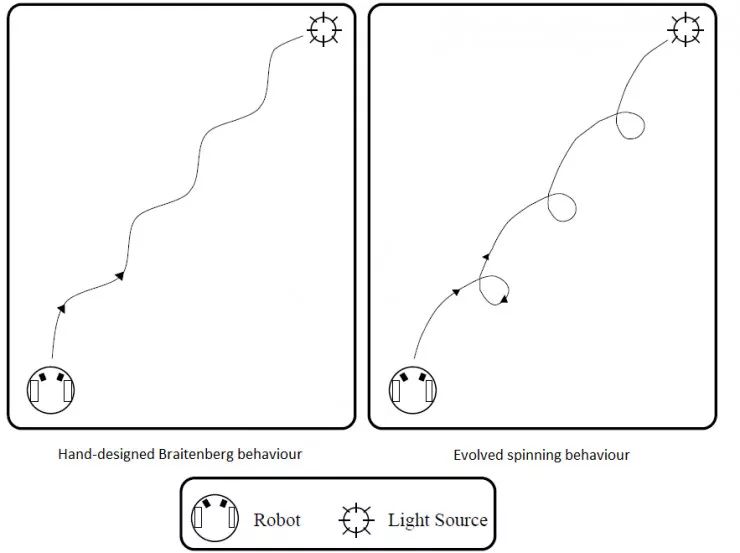
图 7:寻光机器人运动。走向光源时,手编 Braitenberg 式运动(左)和演变自旋运动(右)的路径。



图 11:以静态运动视角看进化步态的小样本。这产生了惊人有效和逼真的行为,软机器人从面板左侧向右侧前进。
每个颜色都有对应的立体像素类型(红色和绿色分别表示相反收缩的肌肉组,黑色和浅蓝色分别代表坚硬和柔软的支撑材料)。
在顶部步态中,注意进化怎么产生各肌肉的不同区域。它使用这些相反的肌肉群来创造类似蠕虫的行为。在底部步态中,使用坚硬(骨头状)支撑材料允许进化产生相对较长的附肢,并做出像马一样飞驰动作。
想知道更多关于计算进化的案例?阅读论文吧 https://arxiv.org/abs/1803.03453
雷锋字幕组正在招募中,扫描下方二维码,备注“雷锋字幕组+姓名”加入我们。


BAT资深算法工程师独家研发课程
最贴近生活与工作的好玩实操项目
班级管理助学搭配专业的助教答疑
学以致用拿offer,学完即推荐就业
扫码或点击阅读原文了解一下!

┏(^0^)┛欢迎分享,明天见!





