深度学习面试100题(第56-60题)
点击蓝字关注我们,小七等你好久喽
深度学习
面试大题第56-60题

56题
什么是边框回归Bounding-Box regression,以及为什么要做、怎么做
解析:
这个问题可以牵扯出不少问题,比如
为什么要边框回归?
什么是边框回归?
边框回归怎么做的?
边框回归为什么宽高,坐标会设计这种形式?
为什么边框回归只能微调,在离真实值Ground Truth近的时候才能生效?
如图1所示,绿色的框表示真实值Ground Truth, 红色的框为Selective Search提取的候选区域/框Region Proposal。那么即便红色的框被分类器识别为飞机,但是由于红色的框定位不准(IoU<0.5), 这张图也相当于没有正确的检测出飞机。

如果我们能对红色的框进行微调fine-tuning,使得经过微调后的窗口跟Ground Truth 更接近, 这样岂不是定位会更准确。 而Bounding-box regression 就是用来微调这个窗口的。
边框回归是什么?
对于窗口一般使用四维向量(x,y,w,h)(x,y,w,h) 来表示, 分别表示窗口的中心点坐标和宽高。 对于图2, 红色的框 P 代表原始的Proposal, 绿色的框 G 代表目标的 Ground Truth, 我们的目标是寻找一种关系使得输入原始的窗口 P 经过映射得到一个跟真实窗口 G 更接近的回归窗口G^。
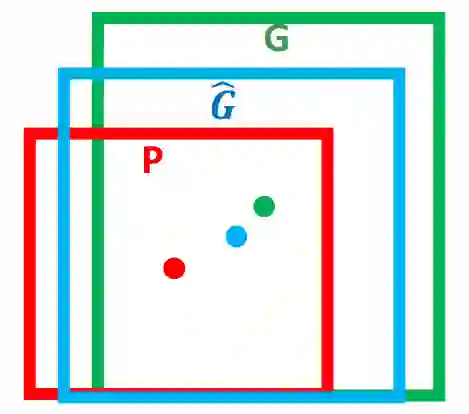
所以,边框回归的目的即是:给定(Px,Py,Pw,Ph)寻找一种映射f, 使得f(Px,Py,Pw,Ph)=(Gx^,Gy^,Gw^,Gh^)并且(Gx^,Gy^,Gw^,Gh^)≈(Gx,Gy,Gw,Gh)
边框回归怎么做的?
那么经过何种变换才能从图2中的窗口 P 变为窗口G^呢? 比较简单的思路就是: 平移+尺度放缩
先做平移(Δx,Δy),Δx=Pwdx(P),Δy=Phdy(P)这是R-CNN论文的:
G^x=Pwdx(P)+Px,(1)
G^y=Phdy(P)+Py,(2)
然后再做尺度缩放(Sw,Sh), Sw=exp(dw(P)),Sh=exp(dh(P)),对应论文中:
G^w=Pwexp(dw(P)),(3)
G^h=Phexp(dh(P)),(4)
观察(1)-(4)我们发现, 边框回归学习就是dx(P),dy(P),dw(P),dh(P)这四个变换。
下一步就是设计算法那得到这四个映射。
线性回归就是给定输入的特征向量 X, 学习一组参数 W, 使得经过线性回归后的值跟真实值 Y(Ground Truth)非常接近. 即Y≈WX。 那么 Bounding-box 中我们的输入以及输出分别是什么呢?
Input:
RegionProposal→P=(Px,Py,Pw,Ph)这个是什么? 输入就是这四个数值吗?其实真正的输入是这个窗口对应的 CNN 特征,也就是 R-CNN 中的 Pool5 feature(特征向量)。 (注:训练阶段输入还包括 Ground Truth, 也就是下边提到的t∗=(tx,ty,tw,th))
Output:
需要进行的平移变换和尺度缩放 dx(P),dy(P),dw(P),dh(P),或者说是Δx,Δy,Sw,Sh。我们的最终输出不应该是 Ground Truth 吗? 是的, 但是有了这四个变换我们就可以直接得到 Ground Truth。
这里还有个问题, 根据(1)~(4)我们可以知道, P 经过 dx(P),dy(P),dw(P),dh(P)得到的并不是真实值 G,而是预测值G^。的确,这四个值应该是经过 Ground Truth 和 Proposal 计算得到的真正需要的平移量(tx,ty)和尺度缩放(tw,th)。
这也就是 R-CNN 中的(6)~(9):
tx=(Gx−Px)/Pw,(6)
ty=(Gy−Py)/Ph,(7)
tw=log(Gw/Pw),(8)
th=log(Gh/Ph),(9)
那么目标函数可以表示为 d∗(P)=wT∗Φ5(P),Φ5(P)是输入 Proposal 的特征向量,w∗是要学习的参数(*表示 x,y,w,h, 也就是每一个变换对应一个目标函数) , d∗(P) 是得到的预测值。
我们要让预测值跟真实值t∗=(tx,ty,tw,th)差距最小, 得到损失函数为:
Loss=∑iN(ti∗−w^T∗ϕ5(Pi))2
函数优化目标为:
W∗=argminw∗∑iN(ti∗−w^T∗ϕ5(Pi))2+λ||w^∗||2
利用梯度下降法或者最小二乘法就可以得到 w∗。
57题
请阐述下Selective Search的主要思想
解析:
1 使用一种过分割手段,将图像分割成小区域 (1k~2k 个)
2 查看现有小区域,按照合并规则合并可能性最高的相邻两个区域。重复直到整张图像合并成一个区域位置
3 输出所有曾经存在过的区域,所谓候选区域
其中合并规则如下: 优先合并以下四种区域:
①颜色(颜色直方图)相近的
②纹理(梯度直方图)相近的
③合并后总面积小的: 保证合并操作的尺度较为均匀,避免一个大区域陆续“吃掉”其他小区域 (例:设有区域a-b-④c-d-e-f-g-h。较好的合并方式是:ab-cd-ef-gh -> abcd-efgh -> abcdefgh。 不好的合并方法是:ab-c-d-e-f-g-h ->abcd-e-f-g-h ->abcdef-gh -> abcdefgh)
合并后,总面积在其BBOX中所占比例大的: 保证合并后形状规则。

上述四条规则只涉及区域的颜色直方图、梯度直方图、面积和位置。合并后的区域特征可以直接由子区域特征计算而来,速度较快。
58题
什么是非极大值抑制(NMS)?
解析:
R-CNN会从一张图片中找出n个可能是物体的矩形框,然后为每个矩形框为做类别分类概率:

就像上面的图片一样,定位一个车辆,最后算法就找出了一堆的方框,我们需要判别哪些矩形框是没用的。非极大值抑制的方法是:先假设有6个矩形框,根据分类器的类别分类概率做排序,假设从小到大属于车辆的概率 分别为A、B、C、D、E、F。
(1)从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
(2)假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
(3)从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
就这样一直重复,找到所有被保留下来的矩形框。
非极大值抑制(NMS)顾名思义就是抑制不是极大值的元素,搜索局部的极大值。这个局部代表的是一个邻域,邻域有两个参数可变,一是邻域的维数,二是邻域的大小。这里不讨论通用的NMS算法,而是用于在目标检测中用于提取分数最高的窗口的。
例如在行人检测中,滑动窗口经提取特征,经分类器分类识别后,每个窗口都会得到一个分数。但是滑动窗口会导致很多窗口与其他窗口存在包含或者大部分交叉的情况。这时就需要用到NMS来选取那些邻域里分数最高(是行人的概率最大),并且抑制那些分数低的窗口。
59题
什么是深度学习中的anchor?
解析:
当我们使用一个3*3的卷积核,在最后一个feature map上滑动,当滑动到特征图的某一个位置时,以当前滑动窗口中心为中心映射回原图的一个区域(注意 feature map 上的一个点是可以映射到原图的一个区域的,相当于感受野起的作用),以原图上这个区域的中心对应一个尺度和长宽比,就是一个anchor了。
fast rcnn 使用3种尺度和3种长宽比(1:1;1:2;2:1),则在每一个滑动位置就有 3*3 = 9 个anchor。
60题
CNN的特点以及优势
解析:
CNN使用范围是具有局部空间相关性的数据,比如图像,自然语言,语音
局部连接:可以提取局部特征。
权值共享:减少参数数量,因此降低训练难度(空间、时间消耗都少了)。可以完全共享,也可以局部共享(比如对人脸,眼睛鼻子嘴由于位置和样式相对固定,可以用和脸部不一样的卷积核)
降维:通过池化或卷积stride实现。
多层次结构:将低层次的局部特征组合成为较高层次的特征。不同层级的特征可以对应不同任务。
福利时刻:为了帮助大家更多的学习课程的相关知识,我们特意推出了深度学习系列课程。

分享一哈:之前公司三周年庆活动,推出新人大礼包的活动,注册即送免费课程,此活动还在继续,此活动有超6千人报名了,现在免费,免费,免费送喽,亲们抓紧时间噢,扫码查看详情~~

长按二维码查看
更多资讯
请戳一戳
点击“阅读原文”,可在线报名



