利用轨迹数据自动校准道路交叉口拓扑信息


文章作者:刘国平、马楠
内容来源:滴滴科技合作
出品平台:DataFunTalk
注:转载请联系原作者。
导读:基础路网数据是网约车路线规划和运营管理最重要的数据。路网数据的快速更新能够使线上服务更快地感知物理世界的快速变化,对于提升导航可靠性和用户出行体验至关重要。滴滴作为领先的一站式移动出行平台,拥有海量轨迹数据,结合司乘上报数据、车载图像数据等丰富的数据来源,持续提升自动化、精准更新路网拓扑信息的能力。
Automatic Calibration of Road Intersection Topology using Trajectories
01
简介
02
技术方案
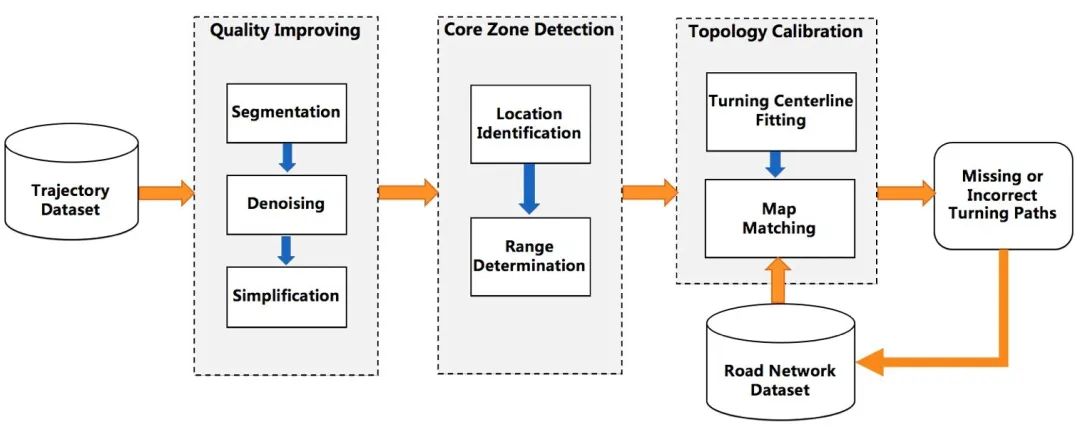

为了检测道路交叉口影响区内的详细拓扑信息,首先需要识别道路交叉口的核心区域,即路口位置和覆盖范围。考虑到不同路口大小不一,并且路口范围内轨迹通常具有减速、转向等特征,我们设计了一套基于四叉树空间划分和Mean-shift的自适应路口位置检测算法。在搜索道路交叉口单元的过程中,将四叉树的最小边长设置为25米,并从200米大小边长开始的层(即从四叉树底部开始的第四层)搜索道路交叉口单元。由于交叉口中心位置的轨迹往往比路段具有更多的转向与较低的转速,我们对每个网格单元中的所有特征点(轨迹压缩获得)执行速度分析和基于方向的DBSCAN聚类,筛选潜在的道路交叉口网格单元。随后,我们提出了基于方向的聚类算法识别路口的中心位置。
鉴于不同路口其形状有较大差异,如何更通用地基于轨迹数据确定路口的核心区范围?实质上道路交叉口的中心位置附近并不总是具有相对于路段区域更多转向行为,例如,环岛和立交桥。本文中我们利用环状几何模型逐层检测路口覆盖范围。对于一个路口而言,越到核心区边缘的环包含的转向点密度越低、速度越大,因此该路口模型适于不同形状路口的范围提取。
在影响区拓扑结构的校准阶段,我们基于检测的路口中心位置和核心区范围向外扩展,根据预设的半径阈值获得影响区的范围,同时获取交叉路口影响区内的全部轨迹。我们对这些轨迹进行转向簇提取与中心线拟合,并将拟合的转向路径与基准路网进行地图匹配。
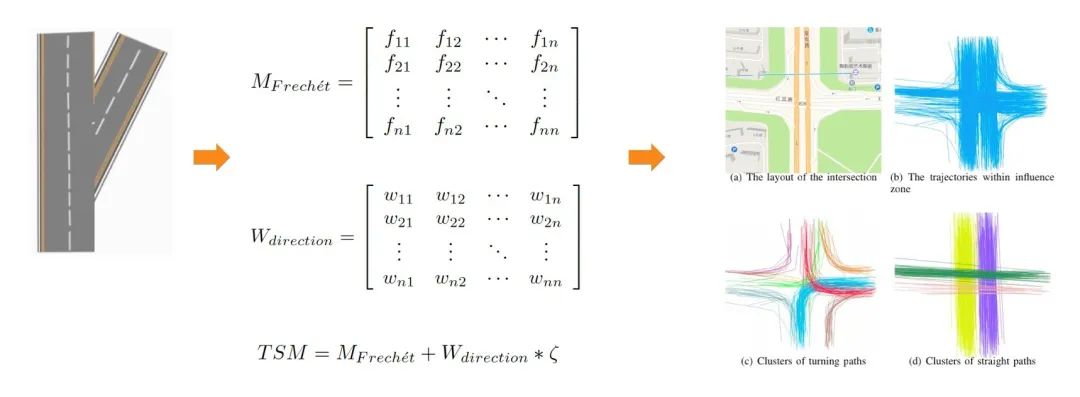
Frechét距离适于评测曲线之间的相似性,但是对于复杂形状的路口以及路口邻接路段间朝向偏差较小的情况,Frechét表现不佳。鉴于此,我们将方向权重引入相似性评测中。对于任意两条轨迹序列,分别计算起点与终点间的方向差,并结合Frechét距离生成轨迹集合的距离矩阵。基于该矩阵结合DBSCAN聚类实现路口范围内的转向簇提取。
在提取转向簇后,需要对各簇轨迹进行拟合,我们采用基于Force attraction的聚类方法获取各簇对应的转向路径。Force attraction方法首先随机采样簇中的一条轨迹作为参考轨迹,随后使用同簇内其余轨迹对参考轨迹中点的位置进行迭代调整。在调整过程中,Force attraction算法假定任意轨迹点上有吸引力和排斥力作用,通过搜索两个力达到平衡的位置来获得参考轨迹对应点的新位置。由于随机采样轨迹容易导致拟合得到的中心线不精准,特别是当随机采样的参考轨迹远离实际道路中心时,拟合偏差较大。因此,我们引入基于Frechét的采样策略。具体来说,我们从簇中随机采样k条轨迹作为候选参考轨迹,并分别计算每个候选者与该簇的其余轨迹之间的Frechét距离。将具有最小距离和的候选轨迹视为参考轨迹。
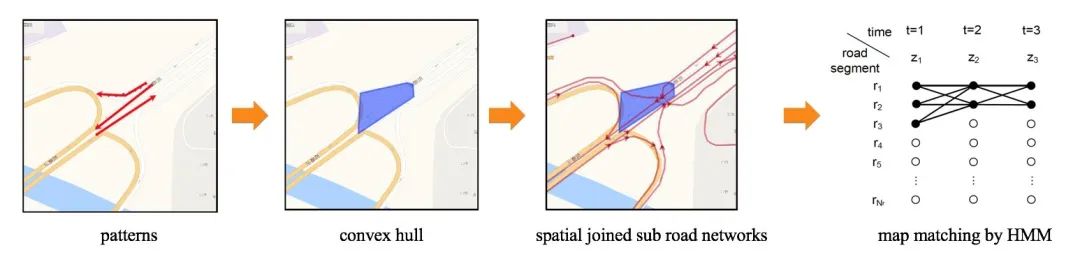
在获得转向路径后,我们采用经典的HMM算法结合基准路网进行地图匹配。为加速匹配过程,我们基于每个路口的转向路径集生成凸包再与路网空间关联。
03
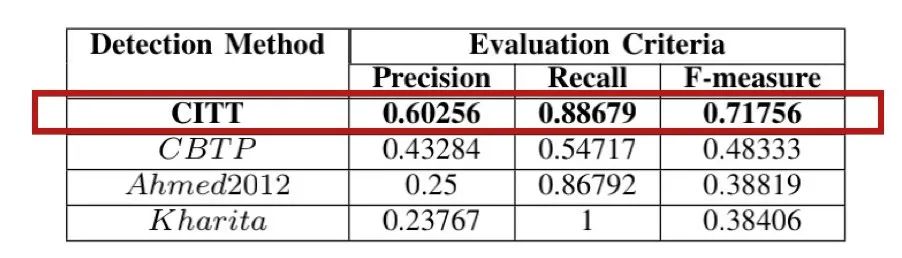
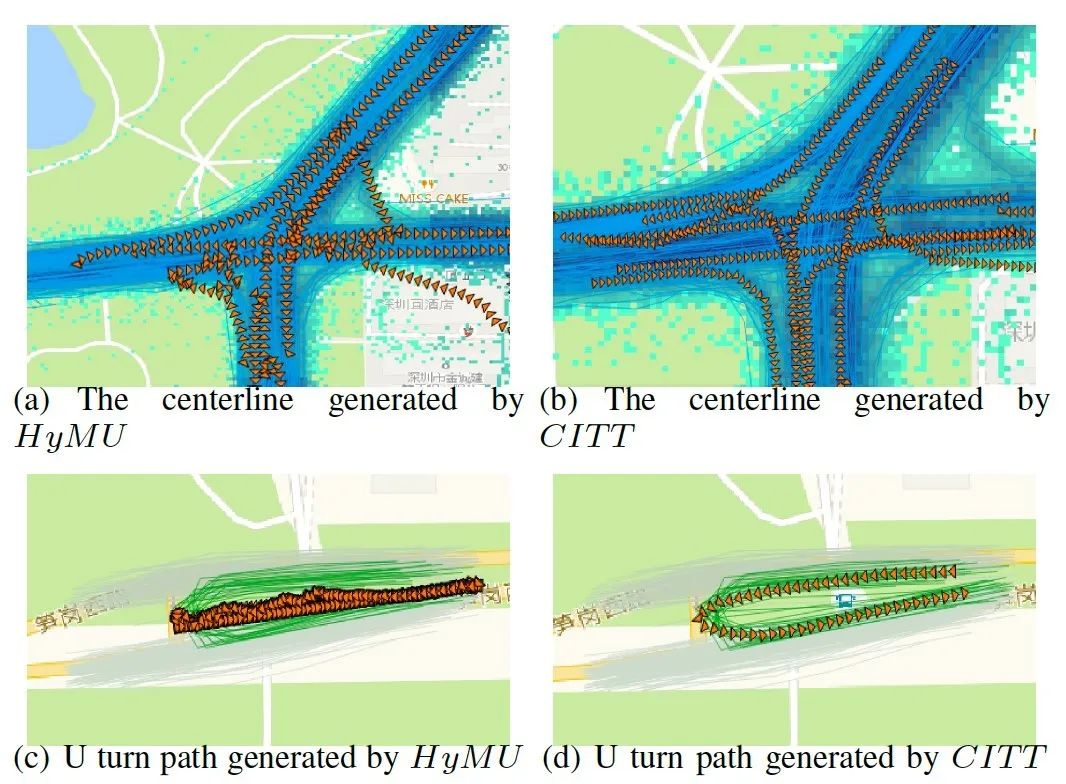
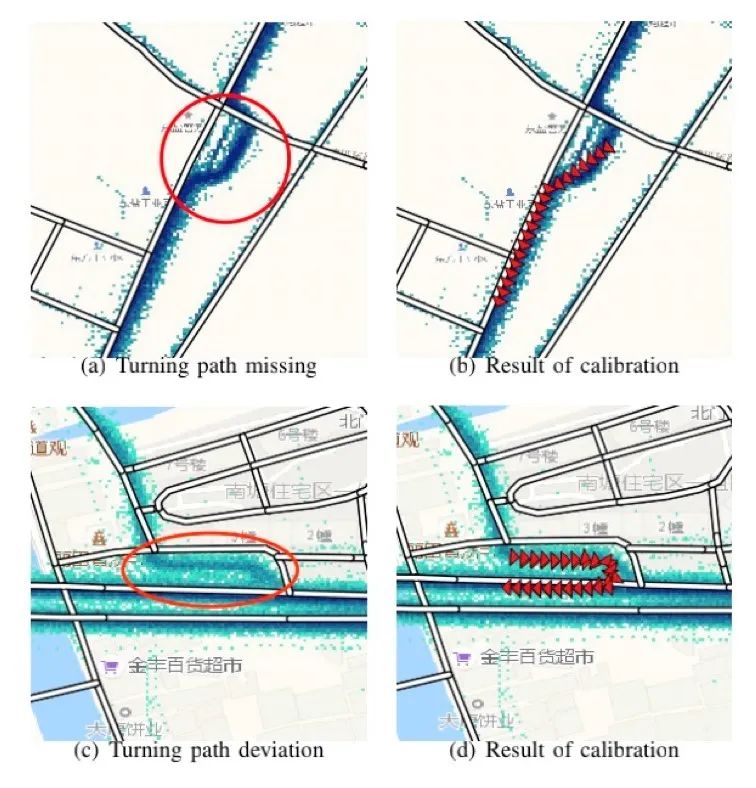
应用效果
04
展望
今天的分享就到这里,谢谢大家。
如果您喜欢本文,点击右上角,把文章分享到朋友圈~~
欢迎加入 DataFunTalk 自动驾驶技术交流群,跟同行零距离交流。如想进群,请加逃课儿同学的微信(微信号:datafun-coco),回复:自动驾驶,逃课儿会自动拉你进群。

论文核心贡献者

赵俐晟
华东师范大学硕士研究生
研究方向包括地图更新,
旅行时间预测,道路封闭检测。

濮敏
华东师范大学硕士研究生
研究方向为基于位置的服务。

毛嘉莉
华东师范大学研究员
研究方向包括时空/
情境数据管理、
面向智慧城市应用的智能服务。

刘国平
滴滴地图与公交事业部
资深算法工程师

温翔
滴滴地图与公交事业部
高级专家工程师
关于我们:

一个在看,一段时光!👇


