【泡泡一分钟】ProbFlow:联合光流和不确定性估计
每天一分钟,带你读遍机器人顶级会议文章
标题:ProbFlow: Joint Optical Flow and Uncertainty Estimation
作者:Anne S. Wannenwetsch, Margret Keuper, Stefan Roth
来源:International Conference on Computer Vision (ICCV 2017)
编译:杨雨生
审核:颜青松 陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

由于区域纹理不明显,运动边界,遮挡等原因,光流估计仍然是一个具有挑战性的问题。同样的原因也导致对一个图像进行光流估计时,其中每一个像素点的可靠性是不一致的。为此,引入了事后置信度测量来评估光流中每一个像素点的可靠性。作者通过引入一种联合预测光流及其潜在不确定性的方法,解决了光流计算和置信度估计之间人工分离的问题。从常见的能量公式入手,作者依赖于给定图像的光流相对应的后验分布,基于平均场理论,推导出一种变分推断方案,该方案结合了能量最小化的最佳实现。将沿着每个像素的光流的不确定性作为变分分布的熵。作者将方法应用于两种不同的能量和两种不同的基准,证明了所提概率性方法的灵活性。作者不仅取得了与采用能量最小化方法相比较而得到的光流结果,而且获得了明显优于现有的事后估计方法的可靠的不确定性测量。
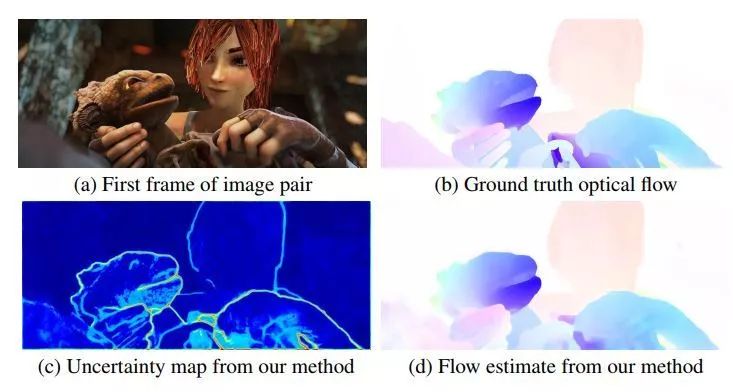
图1,作者的不确定性测量方法准确地提取出了可靠的光流预测区域(深蓝色部分),以及图像的一部分错误估计区域(深红色部分)。
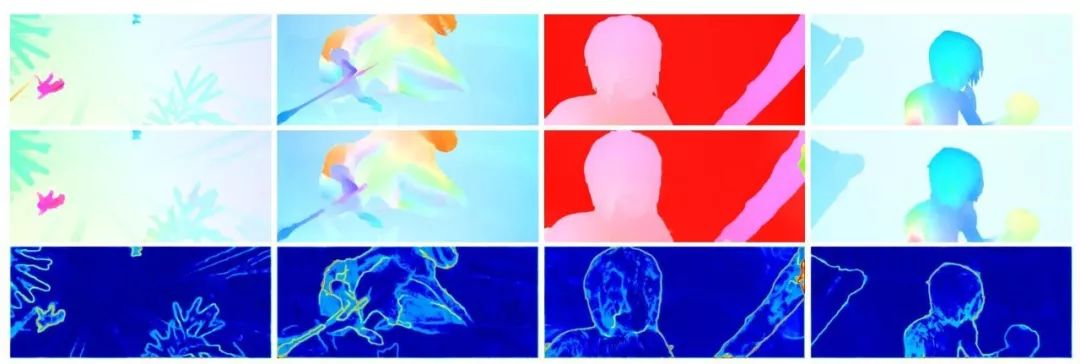
图2,第一行是光流真值,第二行是光流预测,第三行是不确定性估计。

Abstract
Optical flow estimation remains challenging due to untextured areas, motion boundaries, occlusions, and more. Thus, the estimated flow is not equally reliable across the image. To that end, post-hoc confidence measures have been introduced to assess the per-pixel reliability of the flow. We overcome the artificial separation of optical flow and confidence estimation by introducing a method that jointly predicts optical flow and its underlying uncertainty. Starting from common energy-based formulations, we rely on the corresponding posterior distribution of the flow given the images. We derive a variational inference scheme based on mean field, which incorporates best practices from energy minimization. An uncertainty measure is obtained along the flow at every pixel as the (marginal) entropy of the variational distribution. We demonstrate the flexibility of our probabilistic approach by applying it to two different energies and on two benchmarks. We not only obtain flow results that are competitive with the underlying energy minimization approach, but also a reliable uncertainty measure that significantly outperforms existing post-hoc approaches.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


