谷歌发布TensorFlow Lattice:得益于先验知识,提升模型泛化能力
AI研习社消息,近日,谷歌科学家发布TensorFlow Lattice,这是一套预建的TensorFlow Estimators,易于使用,它相当于是TensorFlow运算符,用来构建点阵模型(lattice model)。点阵是多维插值查找表(look-up table),与几何教材背面近似于正弦函数的查找表类似。
AI研习社编译整理如下:
我们利用查找表的结构(它可以通过多个输入进行键控),来估计比较随意及灵活的关系,并满足于指定的单调关系,以便更好地泛化。也就是说,训练查找表值使得训练样例的损失最小化。另外,查找表中的相邻值被约束为在输入空间的给定方向上增长,因此模型的输出值也是在这些方向上增长。重要的是,因为是在查找表值之间进行插入,所以点阵模型很平滑,预测也是有界的,这有助于避免测试阶段出现有较大偏差的杂散预测。
点阵模型的作用
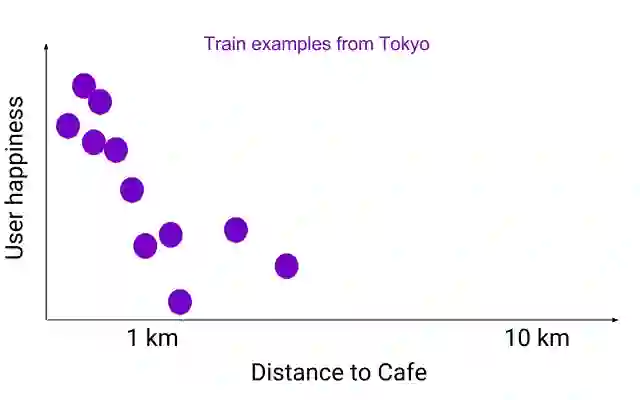
设想一下,你正在设计一个向用户推荐附近咖啡店的系统,你需要让模型学习:“如果两家咖啡店是一样的,那就选择更近一点的。”
下图中我们展示了一个灵活的模型(粉色曲线),它可以精确地与来自东京用户的训练数据(紫色圆点)相匹配,在用户附近有很多咖啡店。
由于训练样例比较嘈杂,可以看到粉色曲线模型产生了过拟合,并且模型还忽略了总的趋势——越近的咖啡店越好。如果用这条粉色曲线模型排列来自德克萨斯州(蓝色)的测试样本,在德克萨斯州咖啡店的分布更加分散,你会发现模型的表现变得很奇怪,有时甚至会认为更远的咖啡店更好!
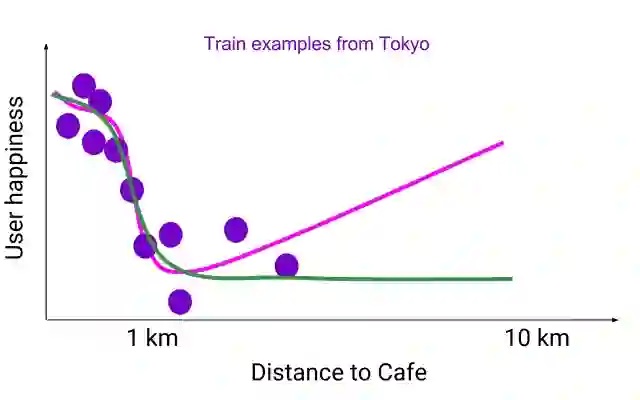
对比起来,运用东京相同的样本训练的点阵模型能被约束为满足单调关系,最终得到一个灵活的单调函数(绿色曲线)。这个函数能与东京的训练样例精准匹配,但是也能泛化到德克萨斯州的样例上,不会出现更远的咖啡店更好的情况。
一般说来,输入会有每个咖啡店的咖啡质量、价格等等。灵活模型很难捕捉到这种形式的整体关系,特别是在一些特征空间中,训练数据非常稀疏和杂乱。“如果其他所有输入占的权重一样,那么更近就更好。”能捕捉到先验知识(例如输入是怎么对预测值产生影响的)的机器学习模型在实际中取得的效果更好,更易于调试并更具有解释性。
预建 Estimators
我们提供一系列点阵模型架构作为TensorFlow Estimators。我们提供的最简单的estimator是校准线性模型(calibrated linear model),它能利用1-d点阵,学习到每个特征的最佳1-d转化,然后线性地将所有校准特征结合起来。如果训练数据集很小或没有复杂的非线性输入交互,模型将非常有效。
另外一个estimator是校准点阵模型(calibrated lattice model),这个模型能利用两层单一点阵模型非线性地将校准特征结合起来,能在数据集中表示复杂的非线性交互。如果有2-10个特征,那么校准点阵模型会是很好的选择,但对于10个或10个以上的特征,我们认为利用一组校准点阵将会得到最佳结果,这时候你能利用预建的一组架构来进行训练。比起随机森林,单调点阵集合(Monotonic lattice ensembles)能增加0.3% -- 0.5%的准确度。另外,比起之前顶尖的单调性学习模型,这些新的TensorFlow点阵estimator 能增加0.1% -- 0.4%的准确度。
动手建立模型
你或许想要用更深的点阵网络进行实验,或者利用部分单调函数(作为深度神经网络或其他TensorFlow架构的一部分)来进行研究。我们提供构件:TensorFlow校准运算符、点阵插入和单调性投影(monotonicity projections)。下图是一个9层深度点阵网络:

在TensorFlow Lattice中,除了模型的灵活选择以及标准的L1、L2正则化,我们还提供新的正则化矩阵:
如上面描述的那样,在输入上进行单调性约束。
在点阵上进行拉普拉斯正则化,以便让学习到的函数更平滑。
对扭曲进行正则化(Torsion regularization),来抑止不必要的非线性特征交互。
大家可以在如下地址看到详细信息并开始进行实验:
GitHub地址:https://github.com/tensorflow/lattice
tutorials地址:https://github.com/tensorflow/lattice/blob/master/g3doc/tutorial/index.md
参考文献:
[1] Lattice Regression(http://t.cn/ROpP4T1), Eric Garcia, Maya Gupta, Advances in Neural Information Processing Systems (NIPS), 2009
[2] Optimized Regression for Efficient Function Evaluation(http://t.cn/ROpPXrA), Eric Garcia, Raman Arora, Maya R. Gupta, IEEE Transactions on Image Processing, 2012
[3] Monotonic Calibrated Interpolated Look-Up Tables(http://t.cn/ROp7ACb), Maya Gupta, Andrew Cotter, Jan Pfeifer, Konstantin Voevodski, Kevin Canini, Alexander Mangylov, Wojciech Moczydlowski, Alexander van Esbroeck, Journal of Machine Learning Research (JMLR), 2016
[4] Fast and Flexible Monotonic Functions with Ensembles of Lattices(http://t.cn/ROp7tII), Mahdi Milani Fard, Kevin Canini, Andrew Cotter, Jan Pfeifer, Maya Gupta, Advances in Neural Information Processing Systems (NIPS), 2016
[5] Deep Lattice Networks and Partial Monotonic Functions(http://t.cn/ROp76zu), Seungil You, David Ding, Kevin Canini, Jan Pfeifer, Maya R. Gupta, Advances in Neural Information Processing Systems (NIPS), 2017
via:Google Research Blog(http://t.cn/ROa2DNR)


新人福利
关注 AI 研习社(okweiwu),回复 1 领取
【超过 1000G 神经网络 / AI / 大数据,教程,论文】
如何用 TensorFlow 生成令人惊艳的分形图案
▼▼▼


