【智能物流】AGV导航技术的创新路径;细数AGV创业公司五大派系
作为AGV的关键技术之一,近年来导航技术的发展引起业界的高度重视。相关企业也在积极推动AGV导航技术的创新,以适应不断变化发展的市场需要。本文在总结分析当前AGV导航的关键技术、主流导航方式以及关键技术创新的基础上,对AGV导航技术的发展趋势进行了展望,希望对行业发展有所裨益。
AGV(Automated Guided Vehicle,自动导向车),因具有良好的柔性和较高的可靠性,能够减少工厂和仓库对劳动力的需求,且安装容易、维护方便,近年来得到越来越广泛的应用。
特别是随着《中国制造2025》战略的全面推进,以及电子商务的迅猛发展,企业对高效、灵活、节能的自动化物流系统的需求越来越强烈,对AGV技术也提出了更高的要求。作为AGV的关键技术之一,导航技术的发展引起业界的高度重视。相关企业也在积极推动AGV导航技术的创新,以适应不断变化发展的市场需要。
AGV导航关键技术
AGV根据路径偏移量来控制速度和转向角,从而保证AGV精确行驶到目标点的位置及航向的过程,叫做“导航”。AGV导航主要涉及三大技术要点:
1.定位
定位是确定移动机器人在运行环境中相对于全局坐标的位置及航向,是AGV导航的最基本环节。目前AGV定位方法分为:
(1)卫星定位。它是一种以空间卫星为基础的高精度导航与定位系统。GPS定位系统用于AGV定位时存在近距离定位精度低等问题。
(2)惯性定位。通过对固联在载体上的三轴加速度计、三轴陀螺仪进行积分,获得载体实时、连续的位置、速度、姿态等信息。但惯性误差经过积分之后都会产生无限的累积,因此纯惯性导航不适合长时间的精确定位。
(3)电子地图匹配定位。利用图像处理技术,将实时获取的环境图像与基准图进行匹配,从而确定载体当前的位置,匹配的特征可以为设定的路标、特定的景象或是道路曲率。电子地图匹配特别适用于对机器人系统长时间的定位误差进行校准。
以上定位方式中,惯性定位为相对定位方式,可以获得连续的位置、姿态信息,但存在累积误差;卫星定位、电子地图匹配等定位方式为绝对定位,可以获得精确的位置信息,但难以获得连续姿态信息。相对定位与绝对定位方式存在较强的互补性,通常采用将两者结合的组合定位方法。
2.环境感知与建模
为了实现AGV自主导航,需要根据多种传感器识别多种环境信息:如道路边界、地形特征、障碍、引导者等。AGV通过环境感知确定前进方向中的可达区域和不可达区域,确定在环境中的相对位置,以及对动态障碍物运动进行预判,从而为局部路径规划提供依据。
目前,多传感器信息融合技术已经被应用于AGV导航系统中,其所起的作用关系着机器人的智能化水平。这种技术的核心在于可以有效地对多传感器收集到的信息进行处理和融合,提高AGV自身对于不确定信息的抵抗能力,确保有更多可靠的信息被利用,有助于AGV更为直观地判断出周围的环境。
3.路径规划
路径规划是导航的一个重要环节。AGV根据环境的变化,对环境信息进行收集和分析,按照某一性能进行搜索,进而找出从起点到目标点的最优无碰撞路径或次优无碰撞路径;能够处理环境模型中的不确定因素和路径跟踪中出现的误差,使外界对机器人的影响降到最小;利用已知信息来引导AGV动作,从而得到相对更优的行为策略。
根据AGV掌握环境信息的程度不同,可分为两种类型:一个是基于环境信息已知的全局路径规划,另一个是基于传感器信息的局部路径规划,后者环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。
主流导航方式及其特点
AGV从出现至今,已经衍生出了多种导航方式,每种导航方式均有自己的独特之处和用武之地。目前AGV主流的导航方式有以下几种:
1.磁条导航
磁条导航是一项非常成熟的技术,主要是通过在路面上铺设磁条,通过磁导航传感器不间断地感应磁条产生的磁信号实现导航,通过读取预先埋设的RFID卡来完成指定任务。磁条导航现场施工简单,成本低,对于声光无干扰性,AGV运行线路明显,线路二次变更容易、变更周期短,对施工人员技术要求低。但此导航方式灵活性差,AGV只能沿磁条行走,更改路径需重新铺设磁条,且磁条容易损坏,后期维护成本较高。
2.电磁导航
电磁导航是较为传统的导航方式之一,目前仍被许多系统采用。它是在AGV的行驶路径上埋设金属线,并在金属线加载导引频率,通过对导引频率的识别来实现AGV的导引。其主要优点是引线隐蔽,不易污染和破损,导航原理简单而可靠,便于控制和通讯,对声光无干扰,制造成本较低。缺点是路径难以更改扩展,对复杂路径的局限性较大。
3.光学导航
光学导航是在AGV的行驶路径上涂漆或粘贴色带,通过对摄像机采入的色带图像信号进行简单处理而实现自动导引。该导航方式分为色带跟踪导航、二维码识别等功能。光学导航技术成熟,应用也较为广泛。目前,亚马逊应用的KIVA机器人就是利用光学导航实现的。该导航方式灵活性比较好,地面路线设置简单易行,但对色带的污染和机械磨损十分敏感,对环境要求过高,导引可靠性较差,精度较低。
4.激光导航
激光导航是在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过激光扫描器发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和航向,并通过连续的三角几何运算来实现AGV的导引。
此项技术最大的优点是,AGV定位精确,地面无需其他定位设施,行驶路径可灵活多变,能够适合多种现场环境。缺点是制造成本高,对环境要求比较苛刻(外界光线、地面要求、能见度要求等),不适合室外(尤其是易受雨、雪、雾的影响)应用。
5.视觉导航
视觉导航是在AGV上安装CCD摄像机,AGV在行驶过程中通过视觉传感器采集图像信息,并通过对图像信息的处理确定AGV的当前位置。
视觉导航方式具有路线设置灵活、适用范围广、成本低等优点。但是,由于利用车载视觉系统快速准确地实现路标识别这一技术瓶颈尚未得到突破,因此,目前该方法尚未进入实用阶段。
6.惯性导航
惯性导航是在AGV上安装陀螺仪,在行驶区域的地面上安装定位块,AGV可通过对陀螺仪偏差信号(角速率)的计算及地面定位块信号的采集来确定自身的位置和航向,从而实现导引。
此项技术在军方较早运用,其主要优点是技术先进,定位精准,地面处理工作量小,路径灵活性强。其缺点是制造成本较高,导引的精度和可靠性与陀螺仪的制造精度及其后续信号处理密切相关。
7.轮廓导航
轮廓导航是目前AGV最为先进的导航技术。该技术利用二维激光扫描仪对现场环境进行测量、学习,并绘制导航环境,然后进行测量学习,修正地图进而实现自动导航功能。轮廓导航利用自然环境(墙壁、柱子以及其它固定物体)进行自由测距导航,根据环境测量结果更新位置。该导航技术的优点是,不需要反射器或其它人工地标,能够降低安装成本,减少维护工作。
导航技术的创新与应用
当前的AGV市场可以说是百花争艳,同质化竞争严重。面对激烈的市场竞争以及电商、制造等行业对智慧物流更强烈的市场需求,一些物流系统集成商、新兴物流机器人企业等在AGV导航技术领域不断发力,寻求创新突破。比较典型的技术创新包括SLAM导航、惯性+视觉导航、无反射板激光导航等。
1.SLAM导航
SLAM(SimultaneousLocalizationandMapping)导航,表示在不具备周围环境先验信息的前提下,让AGV在运动过程中根据自身携带的传感器和对周围环境的感知进行自身定位,同时增量式构建环境地图。SLAM方法可以提高AGV的自主能力和环境适应能力,使AGV可以在未知的环境中进行自主定位和导航。SLAM导航可以不需要预先铺设任何轨迹,方便导航路线的更改,并实现实时避障,有助于实现多AGV的协调控制。
在2017 CeMAT Asia展会上,SLAM导航AGV引起大家的高度关注。

如新松机器人公司最新研发的“移动搬运平台”,便是采用先进的激光SLAM技术,导航精度高,可在高度动态环境下提供迅速的、可追踪的输送流程,进行智能化的自动导航,躲避障碍和选择最佳路径完成任务。艾瑞思机器人参展的SLAM导航移动机器人,可以依靠自身传感器在未知环境中获得感知信息,实时地创建周围环境的地图;同时,可利用创建的地图实现自主定位,还可以主动避开障碍物。
2.惯性+视觉导航
当前,复合导航是AGV导航的主要创新方向,其中惯性+视觉导航最为主流。该组合导航技术通过CCD传感器感知环境,由计算机对图像进行处理分析,获取载体的位置和姿态等导航信息,进而修正惯性误差。一方面,视觉导航为惯性导航提供误差补偿信息,弥补了惯性误差随时间漂移的不足;另一方面,惯性导航凭借系统数据更新率高、不受光照等环境影响、短时定位精度高的优势,弥补了视觉导航处理实时性不足的缺陷。
如海康机器人公司自主研发的阡陌仓储机器人,采用二维码视觉导航+惯性导航双导航技术,实现自主定位,定位精度误差小于5mm,稳定高效,可智能协调作业,大幅提升运维及管理效率。欧铠公司最新研制的小精灵机器人是一款专门针对工厂内简单轻型的物料搬运的产品。它采用惯性+二维码视觉导航,不仅小巧灵活,而且精度高、速度快,集自动躲避障碍物、自由规划路线、姿态保持等强大功能于一身,大大提高仓库作业效率。
3.无反射板激光自主导航
无反射板激光自主导航技术是艾吉威机器人自主研发的,获得国家发明专利。该导航技术无需安装反射板即可实现激光导航AGV小车的定位和避障,其特征在于:无需辅助导航标志,快速自建地图,柔性程度高,可适应布局变动;维护成本低,可远程诊断;可与WMS、MES信息交互,实现库位管理;RFID、二维码自动选配识别托盘和货物,数据库管理;安全,人机可交互,兼容叉车手柄功能,配置高端机器人叉车功能。
无反射板激光自主导航叉车AGV的应用模式比较全面,可以与自动化仓库系统配套使用,也可以用在工业生产线上的物流装配与物料周转。另外艾吉威还在不断开发新的应用领域及应用模式,例如辊筒叉车集成应用。目前,艾吉威无反射板激光自主导航叉车应用在汽车、家电、电子、电力、新能源等行业,且已出口海外。
4.其他技术创新
一些专注于AGV导航技术研发的企业也在积极推动AGV导航技术的创新。如苏州坤厚自动化科技有限公司,主要提供移动机器人定位导航模块KH-NaviKit和基于该技术的无人叉车AGV智能物流系统。该公司独立开发的基于异构系统架构的机器人核心算法处理器可以提供稳定可靠的定位数据,使之成为AGV理想的定位导航解决方案。
综合来看,目前的AGV导航技术复杂多样,不同的场合应选用不同的导航技术,如:在有叉车行驶的场合,不宜选用磁条导航;路径需要经常变换的场合,应考虑激光导航;露天环境,考虑到气候因素,不宜采用激光导航;在环境恶劣的仓库,适宜使用磁钉和RFID导航;在环境比较好的场景,适宜使用二维码导航。
云南昆船智能装备有限公司总经理杨文华对此表示,随着市场需求的不断变化,未来还将有更多的导航技术出现。导航技术没有孰优孰劣,只有合不合适。做任何事情都需要把可靠性摆在第一位,AGV导航也是如此,应根据使用环境因地制宜地灵活运用导航技术。
AGV导航技术发展趋势
近年来, 随着AGV应用领域不断扩大,应用的复杂程度越来越高,对其导航及相关技术也提出了许多新的要求。未来,AGV导航技术将呈现如下发展趋势:
1.无标记自然导航将被更多采用
新松机器人公司高级副总裁王宏玉表示,未来,工业互联网、边缘计算、云计算以及人工智能与智能移动机器人相互交融会越来越普及,将给AGV行业带来天翻地覆的变化,要求AGV更加智能,更具柔性化。导航技术方面也将更先进,越来越多的AGV将采用无标记自然导航技术以适应复杂、开放的动态环境。如自然轮廓导航,打破了传统固定式导航方式,无需铺设磁条、反射板等固定标记物,同时具有自主避障能力,具有更高的柔性和极强的适应性。
2.视觉导航仍是重要发展方向
视觉导航由于具有探测范围广、目标信息完整等优点,被多位专家认为是今后AGV导航技术的重要发展方向。目前来看,视觉导航技术已取得了很多研究成果,但由于现有计算设备的运算速度和存储容量的限制,其中的图像处理速度慢始终没有得到很好的解决。随着计算机技术的发展及快速图像处理关键技术的突破,视觉导航技术将成为具有广阔前景的AGV导航技术。
3.新技术引发新的解决思路
一些新技术、新产品的出现,将为AGV导航提供新的解决途径。如围绕个人移动终端的室内定位技术发展方兴未艾,基于Wi-Fi、蓝牙的多种方案趋于成熟,并投入市场应用。将这些技术与机器人导航技术相结合,或将为AGV室内导航开辟新思路。
4.新型传感器技术的研发
记者在采访中了解到,常规传感器和多传感器信息融合技术在移动机器人导航中的应用已取得许多重大成果,但在一些特殊的环境中,非视觉传感器的探测范围和精度与视觉导航系统相比不是很理想,对于一些高精度的导航任务还不能胜任,需要开发出新型传感器及提出新的信息融合方法来弥补不足。因此,针对AGV导航的新型传感器的研发和信息融合是业界今后研究的一个重要课题。
来源:物流技术与应用杂志
煮酒论英雄,细数AGV创业公司五大派系
文/新战略机器人全媒体 彭晴
有人的地方就有江湖,AGV行业也不例外,近两年来,新兴的创业公司如雨后春笋般涌现。有意思的是,这些公司中有大部分都师出同门。煮酒论英雄,今天我们就来细数一下AGV创业公司几大派系。
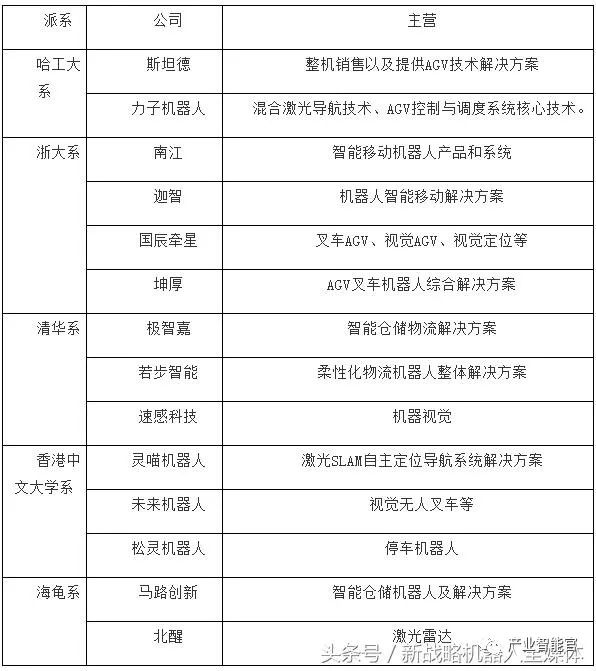
哈工大系
说起工业自动化,哈工大的名声在业界那应该是响当当的,作为国内最早开展工业机器人基础理论和集成技术研究的单位,具备从基础理论和关键技术研究,到装备集成和工程应用能力,1986年哈尔滨工业大学机器人研究所成立,也是国内最早开展机器人技术方面的研究单位之一。

代表企业:斯坦德 力子机器人
斯坦德:机器人团队于2014年组建,公司在2016年6月正式成立。创始团队皆来自哈工大,CEO王永锟为哈工大本科及硕士。目前,斯坦德核心业务主要在两个方面,一是开发SLAM定位、信标定位、惯性导航、运动控制等底层技术;二是在上述基础之上进行产品开发应用。因此当前其业务模式主要为整机销售以及提供AGV技术解决方案。
力子机器人:属于科大智能投资子公司。创始人王斌毕业于哈尔滨工业大学,有多年机器人导航算法开发经验。目前核心产品包括混合激光导航叉车系列,混合激光导航AGV系列,智能仓储机器人,激光导航机器人底盘等。
浙大系
浙江大学控制科学与工程学院(简称控制学院)由始建于1956年的“化学生产的操纵及检验仪器专业”发展而来,该专业是我国在化工自动化领域设立的第一个专业。学院下设工业控制、智能感知与检测、智能系统与控制三个研究所,以及自动化实验教学中心和分析仪器研究中心。

代表企业:南江、迦智、国辰牵星、坤厚
南江:杭州南江机器人股份有限公司总经理章逸丰是浙江大学控制科学与工程学院博士、校外合作导师。带领公司技术团队研发和推广智能移动机器人产品和系统,在国内成功首次将自然无轨导航技术应用于工业领域,客户包括华为、东芝、富士康、菜鸟等大型知名企业。
迦智:杭州迦智科技有限公司成立于2016年,公司核心成员源自浙江大学控制学院机器人实验室,创始人为国内机器人领域知名专家。公司现已与华为、京东等龙头企业展开深度合作,并打造了定位导航核心模块、移动机器人二次开发软件、室内通用移动机器人、园区级送物机器人等多款产品。
国辰牵星:拥有浙江智能机器人研究所技术背景,研发团队由来自浙大、哈工大等国内知名高校的博士硕士组成。主要专注于叉车AGV,视觉AGV,视觉定位等方面。
坤厚:2015年成立,公司目前专注于AGV叉车机器人综合解决方案,公司核心技术为控制模块与软件调度!公司总经理为Xilinx嵌入式系统解决方案专家,毕业于浙江大学,并拥有十多年海外机器人系统和随机过程算法工作经验。
清华系
作为国内首屈一指的高校,1952年全国高等学校院系调整后,清华大学成为一所多科性工业大学,重点为国家培养工程技术人才。几十年来,清华大学始终保持着在工科领域全面而强大的优势。
代表企业:极智嘉 若步智能 速感科技
极智嘉:创始人郑勇毕业于清华工业工程专业,他先后在ABB集团机器人部门、新天域资本投后管理和机器人行业研究等相关部门工作,在机器人领域,尤其在工业化机器人方面积累了丰富的项目经验。CTO李洪波是清华计算机系研究院、机器人专家、清华计算机博士。极智嘉致力于通过领先的机器人产品和人工智能技术实现高度柔性和智能的物流自动化解决方案。
若步智能:公司成立于2016年8月,致力于为客户提供最先进的柔性化物流机器人整体解决方案。技术团队核心成员主要来自清华大学,在智慧物流、智能制造、自动化、地理信息系统等领域有着十多年的科研、开发经验与项目经历。
速感科技:速感科技是一家以机器视觉为核心的人工智能创业公司,是行业领先的视觉解决方案提供商。CEO陈震毕业于清华大学信息交叉学科(计算机方向),信息科学国家实验室,主攻机器人交互技术,法学专业辅修。速感科技致力于帮助行业用户利用低成本、高效的视觉融合技术解决空间中智能移动设备与装备的感知、定位、导航、规划等关键应用问题。
香港中文大学系
香港港中文大学(深圳)依托机器人与智能制造国家地方联合工程实验室、深圳市机器人与智能制造工程实验室等平台,于2016年1月成立机器人与智能制造研究院(以下简称“研究院”)。研究院的研究团队由徐扬生院士带领,多位世界级科学家担任导师,现有专职研究人员50余人,博士以上研究人员占队伍的60%以上,是全球机器人领域最活跃的学术研究团队之一。
代表企业:灵喵 未来机器人 松灵机器人
灵喵:公司成立于2015年10月,专注于为机器人提供室内外通用的模块化专业化激光SLAM自主定位导航系统解决方案。 创始人韩龙先生为香港中文大学机器人学博士,师从香港中文大学(深圳)创校校长徐扬生院士。公司核心团队源于香港中文大学智能机器人实验室,现拥有多位海归博士、硕士及国内重点大学硕士,具有长达十年的自主移动机器人研发经验。
未来机器人:未来机器人是香港中文大学机器人研究院孵化的高新技术企业,未来机器人致力于研发世界领先的自然环境下视觉无人驾驶技术,并将运行在封闭环境下的低速车辆进行高性价比的无人化升级改造。公司成立于2016年02月01日,创始团队包括香港中文大学机器人研究院院长、国家“千人计划”专家刘云辉教授(法人、董事长);香港中文大学博士、深圳市“孔雀计划”人才李陆洋博士等。
松灵机器人:松灵机器人有限公司(agile•X Robotics,简称AGX),成立于2016年,是一家载重移动机器人研发和生产商,产品系列包括:机器人停车(Parknel系列)、物流搬运、定制设计。创始人魏基栋毕业于香港中文大学,曾供职于大疆创新。
海归系
上述企业创始人团队大都来自国内高校,而随着行业的逐渐兴起,也出现了一批海归创业公司。这类创始人大多有海外学习背景并曾经在外国相关公司工作。
代表企业:马路创新 北醒
马路创新:马路创新成立于2015年9月,专注于仓储移动机器人。公司创始人刘哲在法国顶尖工程师学院Ponts et Chaussees的Imagine实验室获得博士学位,主攻高精度3D图像重建,曾带队获得美国NASA火星地表重建全球挑战赛第一。其他联合创始人也均有海外背景。
北醒:北醒是一家专注于“机器人眼睛”研发的公司,致力于将昂贵的激光雷达打造成可消费级产品需要的核心部件。创始人李远,曾在美国Wake Forest University纳米材料与分子研究中心担任高级科学家。2014年,他回国创建北醒,专注于机器人眼睛(激光雷达)。
江湖群雄并起,尽管师出同门,但在竞争激烈的AGV行业,是校友,更是对手。华山论剑,谁能问鼎,姑且拭目以待。




工业互联网操作系统
产业智能官 AI-CPS
用“人工智能赛博物理操作系统”(新一代技术+商业工业互联网操作系统“AI-CPS OS”:云计算+大数据+物联网+区块链+人工智能),在场景中构建状态感知-实时分析-自主决策-精准执行-学习提升的认知计算和机器智能;实现产业转型升级、DT驱动业务、价值创新创造的产业互联生态链。


长按上方二维码关注微信公众号: AI-CPS
本文系“产业智能官”(公众号ID:AI-CPS)收集整理,转载请注明出处!
版权声明:由产业智能官(公众号ID:AI-CPS)推荐的文章,除非确实无法确认,我们都会注明作者和来源。部分文章推送时未能与原作者取得联系。若涉及版权问题,烦请原作者联系我们,与您共同协商解决。联系、投稿邮箱:erp_vip@hotmail.com



