目标检测Loss大盘点

极市导读
本文整理了Focal Loss、IOU Loss、GIOU Loss等的多种loss的相关信息,包括公式表示、优缺点和相关论文等方面的内容。>>加入极市CV技术交流群,走在计算机视觉的最前沿
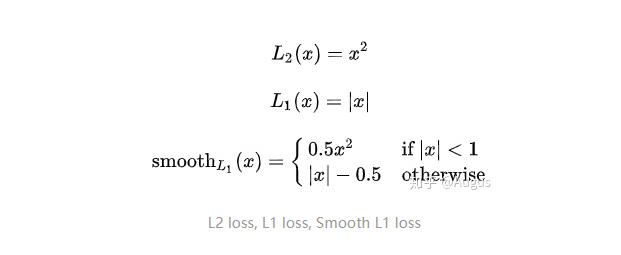
L2, L1, smooth L1
Focal Loss
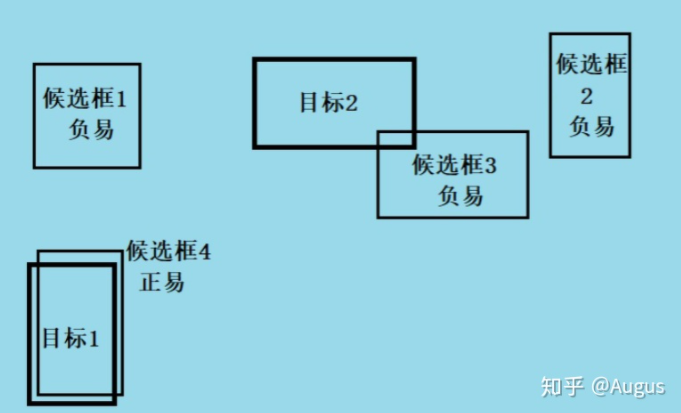
IOU loss
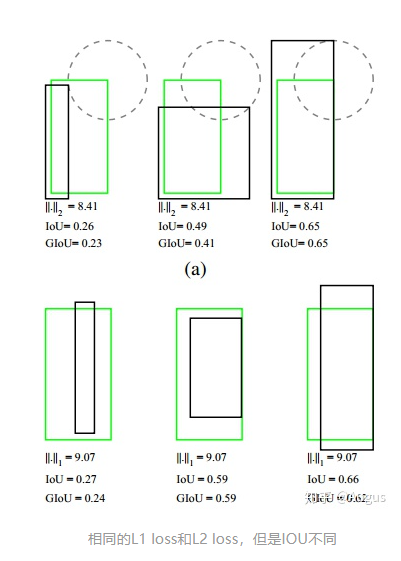
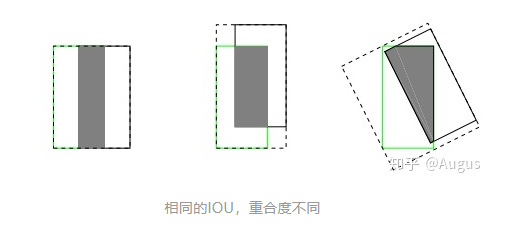
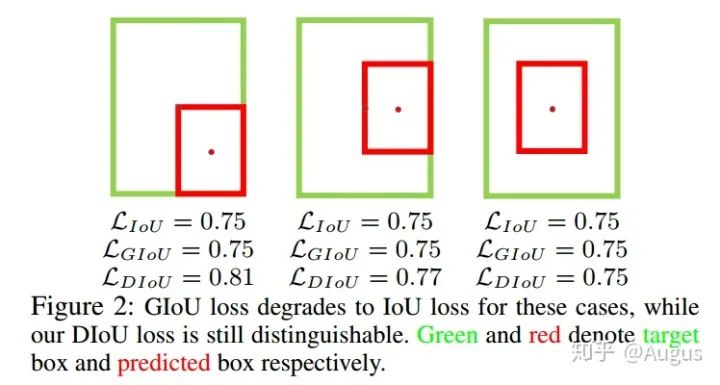
GIOU Loss
-
尺度不变性 -
边框相交时,可以反映边框的相交情况
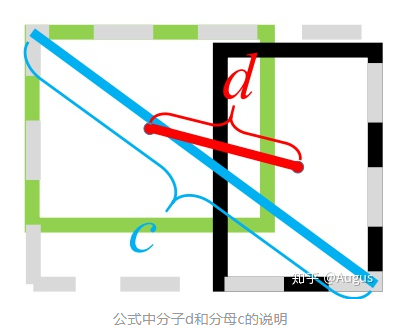
DIOU Loss
-
天津大学 AAAI 2020 -
论文链接: https://arxiv.org/abs/1911.08287 -
github链接: https://github.com/Zzh-tju/DIoU-darknet
CIOU Loss
推荐阅读



登录查看更多
相关内容
Arxiv
0+阅读 · 2020年12月1日
Arxiv
0+阅读 · 2020年11月27日
Arxiv
8+阅读 · 2019年2月11日




相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2020年12月1日
Arxiv
0+阅读 · 2020年11月27日
Arxiv
8+阅读 · 2019年2月11日