干货| 台湾大学林轩田机器学习基石课程学习笔记7 -- The VC Dimension
台大机器学习课程学习笔记7
The VC Dimension
前几节课着重介绍了机器能够学习的条件并做了详细的推导和解释。
机器能够学习必须满足两个条件:
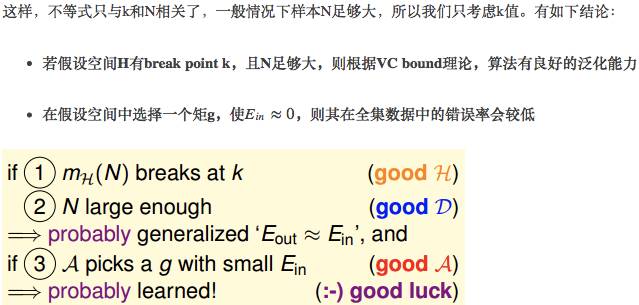
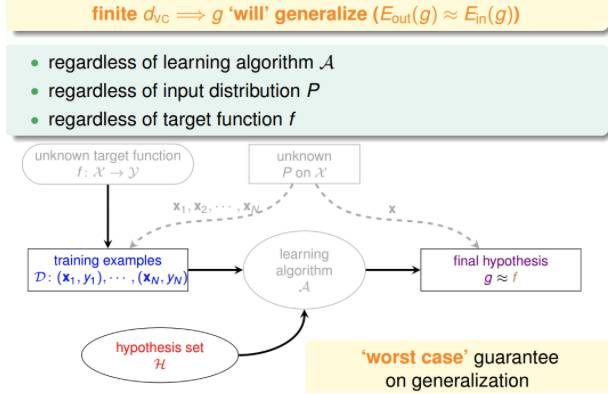
假设空间H的Size M是有限的,即当N足够大的时候,那么对于假设空间中任意一个假设g,
。
利用算法A从假设空间H中,挑选一个g,使
,则
这两个条件,正好对应着test和trian两个过程。train的目的是使损失期望
正因为如此,上次课引入了break point,并推导出只要break point存在,则M有上界,一定存在
本次笔记主要介绍VC Dimension的概念。同时也是总结VC Dimension与
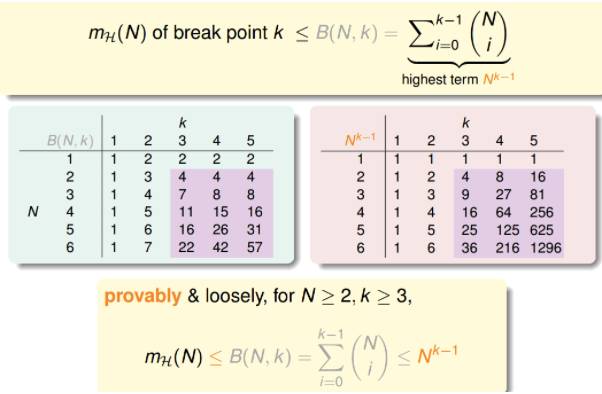
首先,我们知道如果一个假设空间H有break point k,那么它的成长函数是有界的,它的上界称为Bound function。
根据数学归纳法,Bound function也是有界的,且上界为
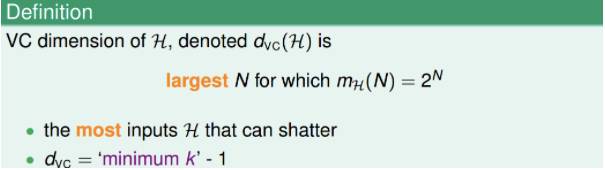
下面介绍一个新的名词:VC Dimension。
VC Dimension就是某假设集H能够shatter的最多inputs的个数,即最大完全正确的分类能力。(注意,只要存在一种分布的inputs能够正确分类也满足)。
shatter的英文意思是“粉碎”,也就是说对于inputs的所有情况都能列举出来。例如对N个输入,如果能够将
根据之前break point的定义:假设集不能被shatter任何分布类型的inputs的最少个数。则VC Dimension等于break point的个数减一。
现在,我们回顾一下之前介绍的四种例子,它们对应的VC Dimension是多少:
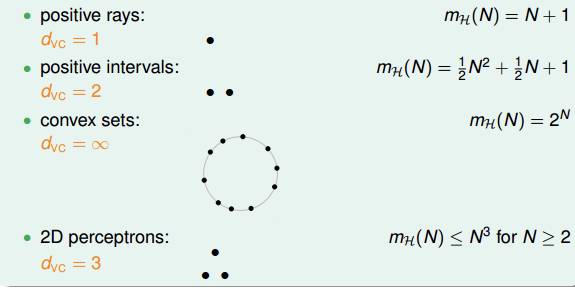
用
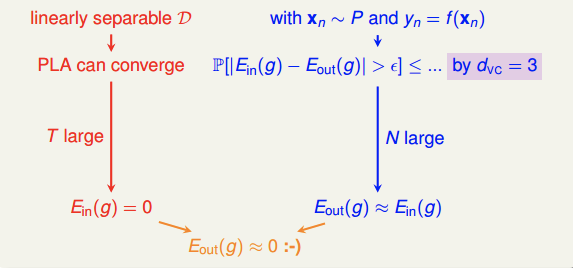
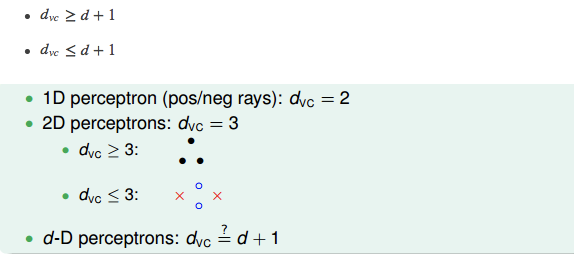
回顾一下我们之前介绍的2D下的PLA算法,已知Perceptrons的k=4,即
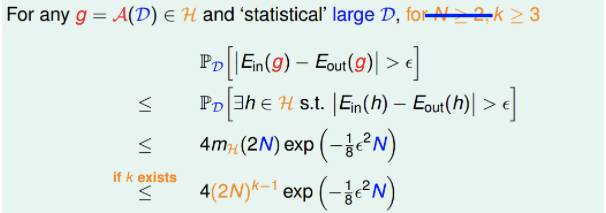
根据VC Bound理论,当N足够大的时候,

这是在2D情况下,那如果是多维的Perceptron,它对应的
已知在1D Perceptron,
首先证明第一个不等式:
在d维里,我们只要找到某一类的d+1个inputs可以被shatter的话,那么必然得到
所以,我们有意构造一个d维的矩阵X能够被shatter就行。X是d维的,有d+1个inputs,每个inputs加上第零个维度的常数项1,得到X的矩阵:
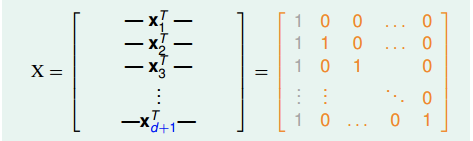
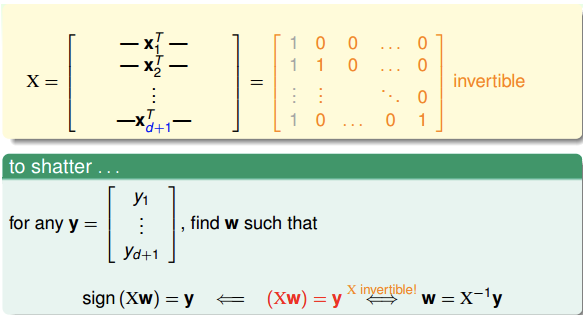
矩阵中,每一行代表一个inputs,每个inputs是d+1维的,共有d+1个inputs。这里构造的X很明显是可逆的。
shatter的本质是假设空间H对X的所有情况的判断都是对的,即总能找到权重W,满足X∗W=y,
然后证明第二个不等式:
在d维里,如果对于任何的d+2个inputs,一定不能被shatter,则不等式成立。我们构造一个任意的矩阵X,其包含d+2个inputs,该矩阵有d+1列,d+2行。这d+2个向量的某一列一定可以被另外d+1个向量线性表示,例如对于向量
转自:机器学习算法与自然语言处理


