公开课视频及PPT | RGBD稠密重建开山之作-KinectFusionLib代码解析
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
SLAM研习社对之前所有直播进行了总结,包括视频、PPT,方便大家二次学习。
主题:《RGBD稠密重建开山之作-KinectFusionLib代码解析》
嘉宾:刘国庆,东北大学研究生,主要研究方向为动态场景下的鲁棒视觉SLAM系统设计和稠密地图构建
PPT:关注公众号:计算机视觉life,后台回复:0223
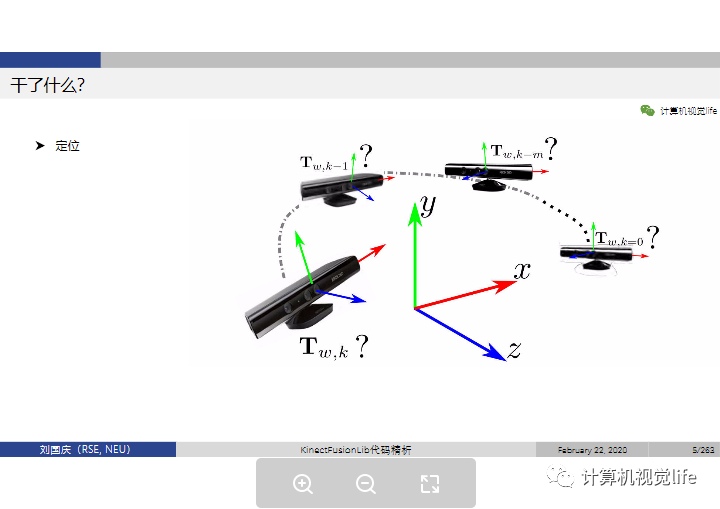
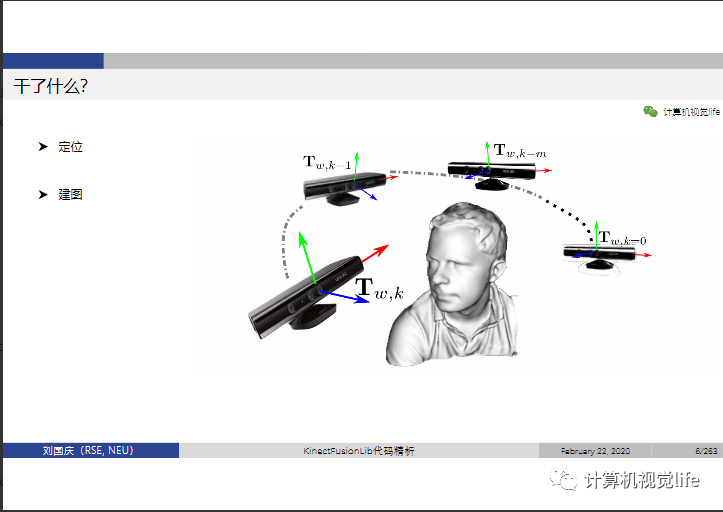
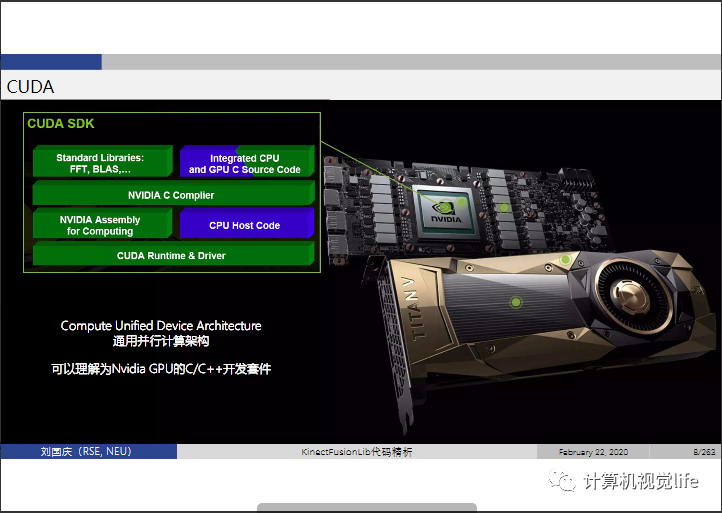
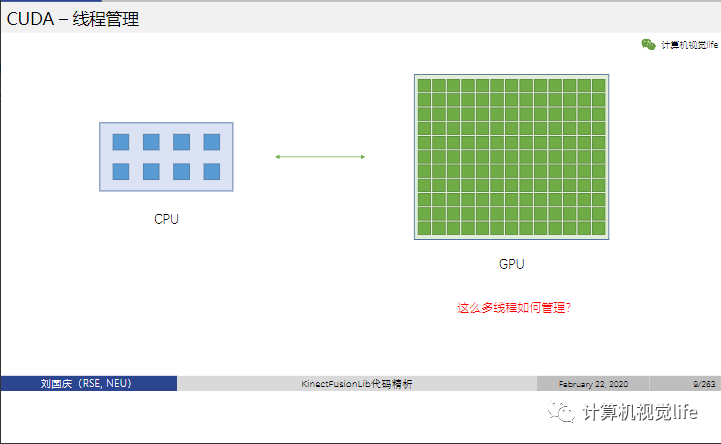
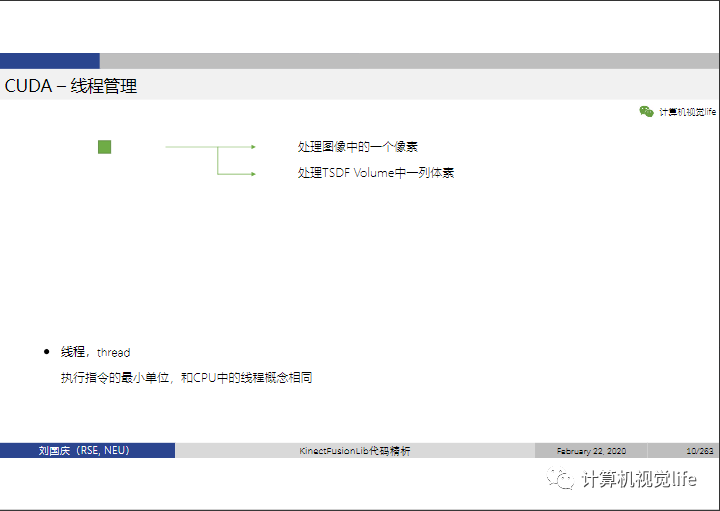
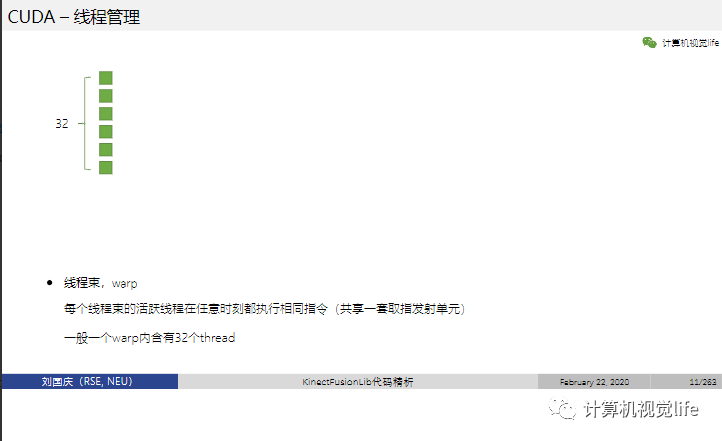
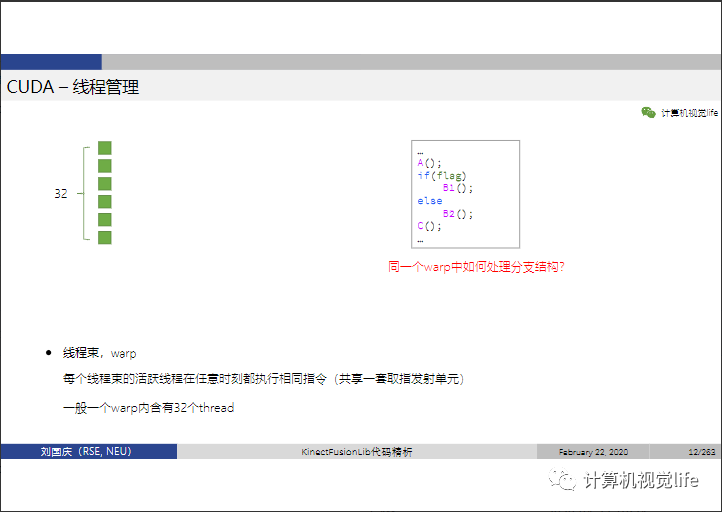
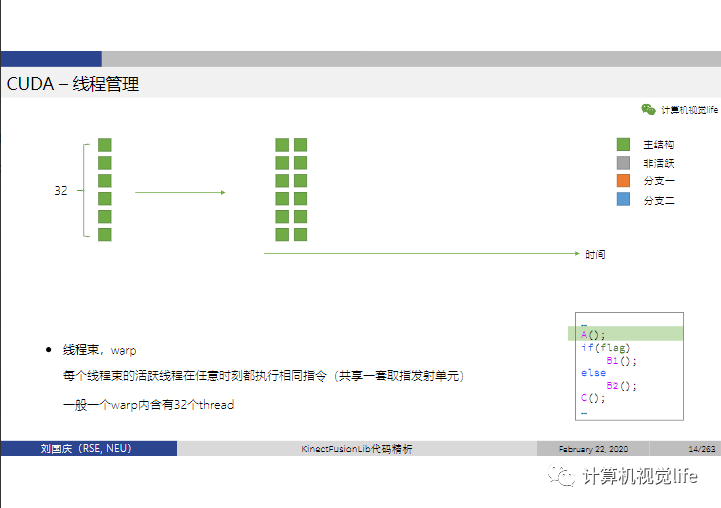
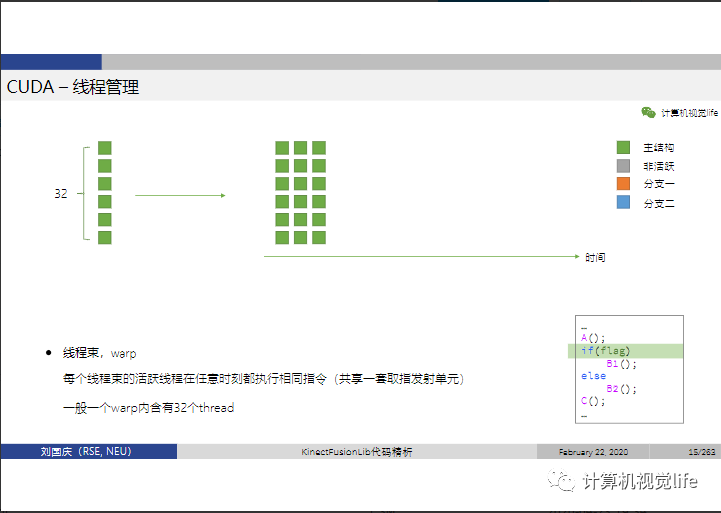
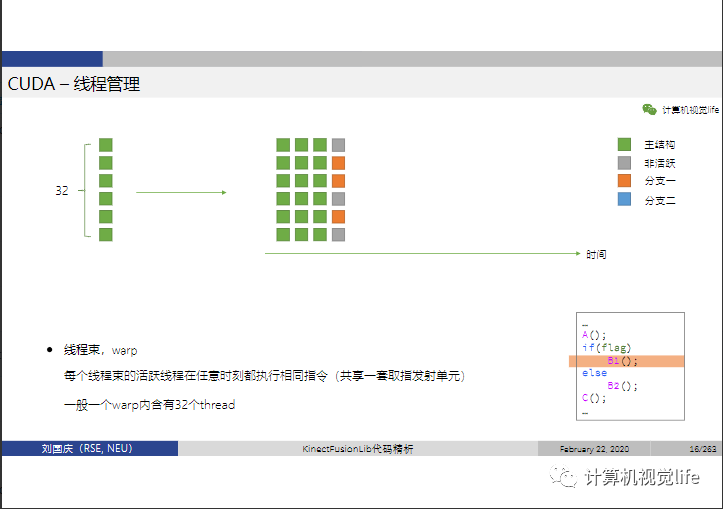
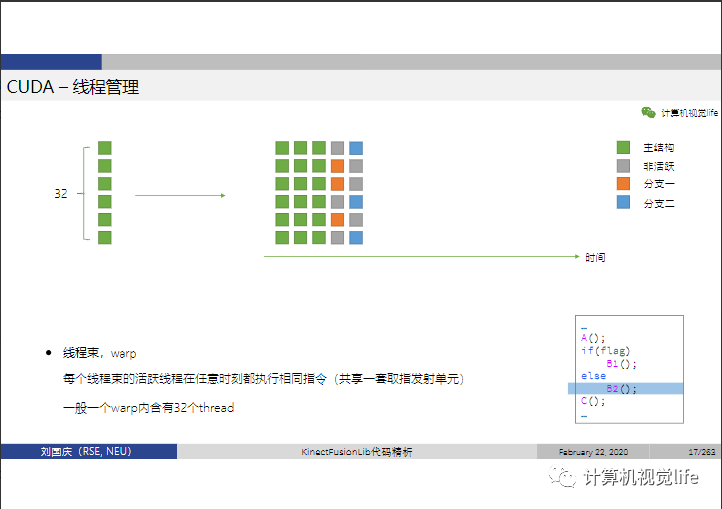
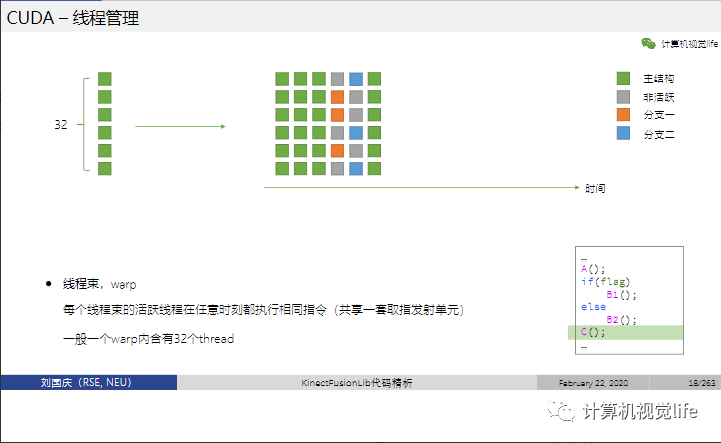
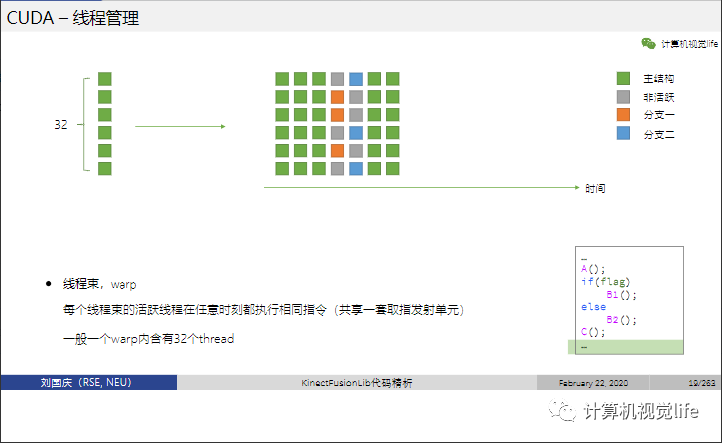
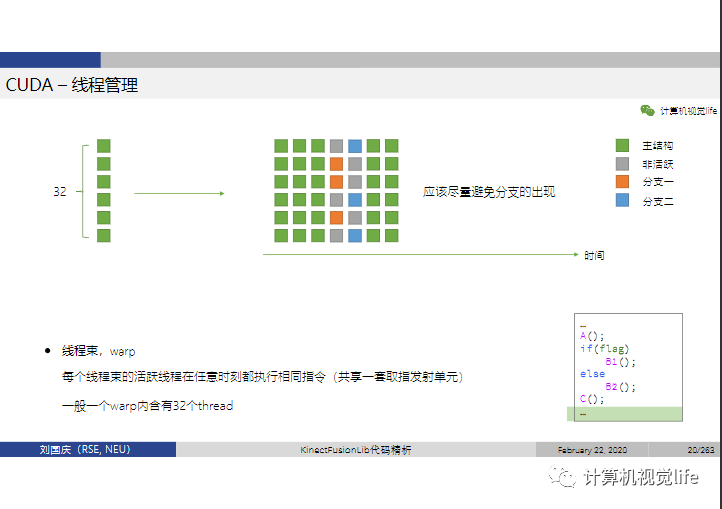
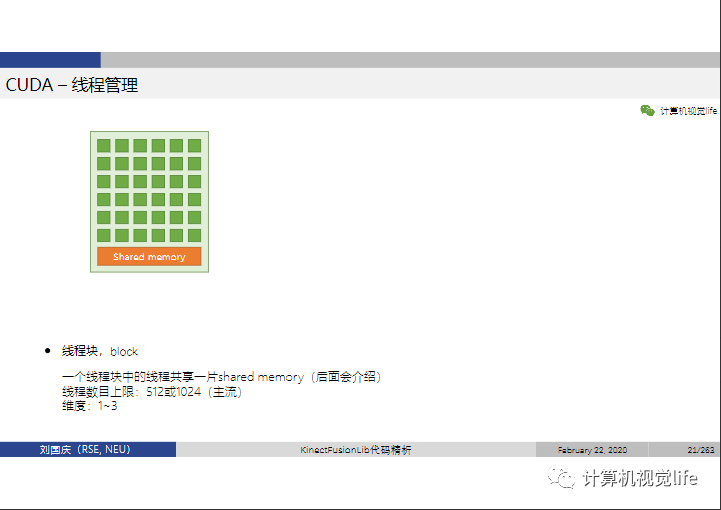
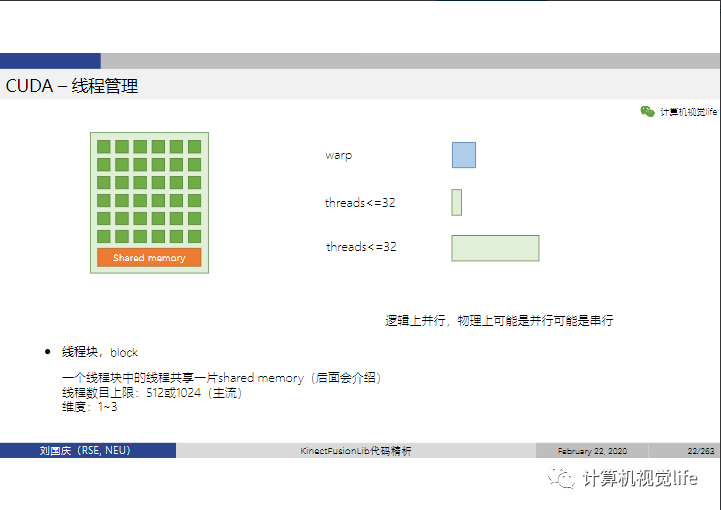
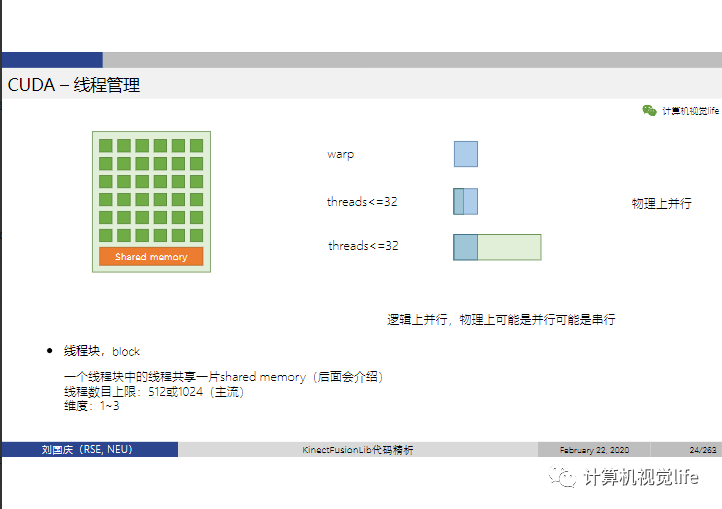
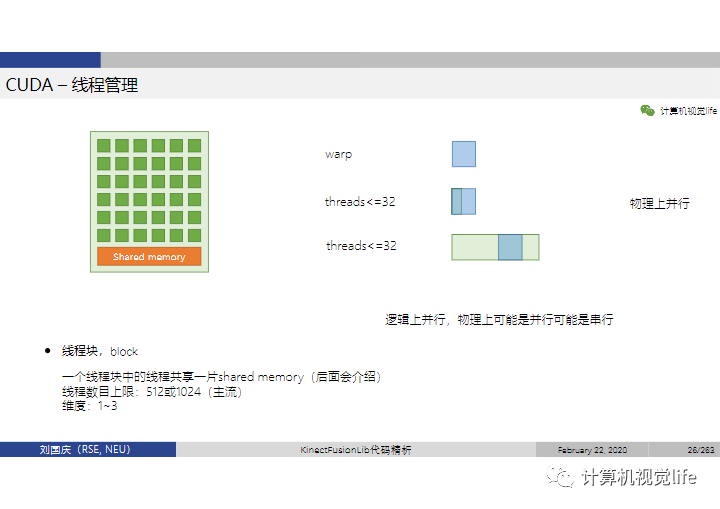
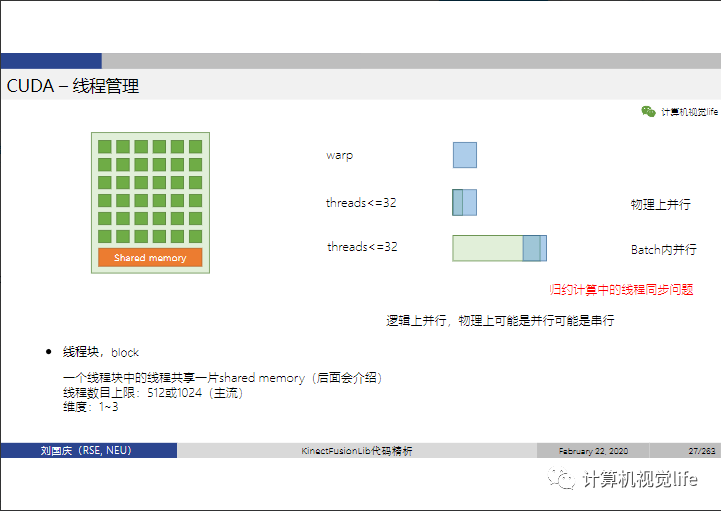
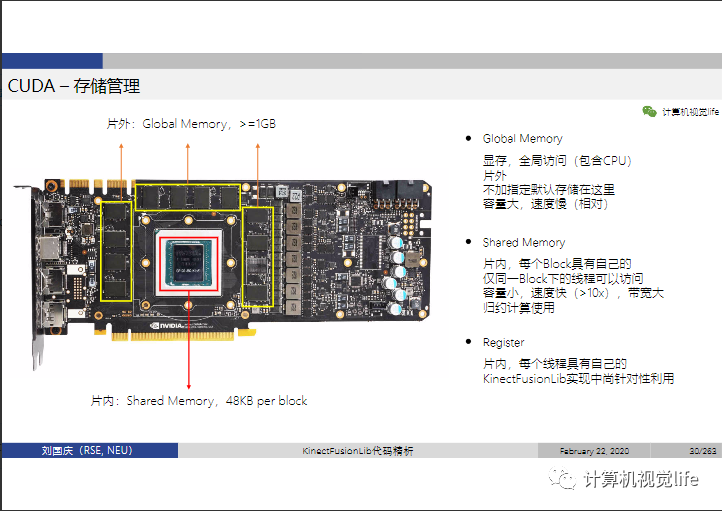
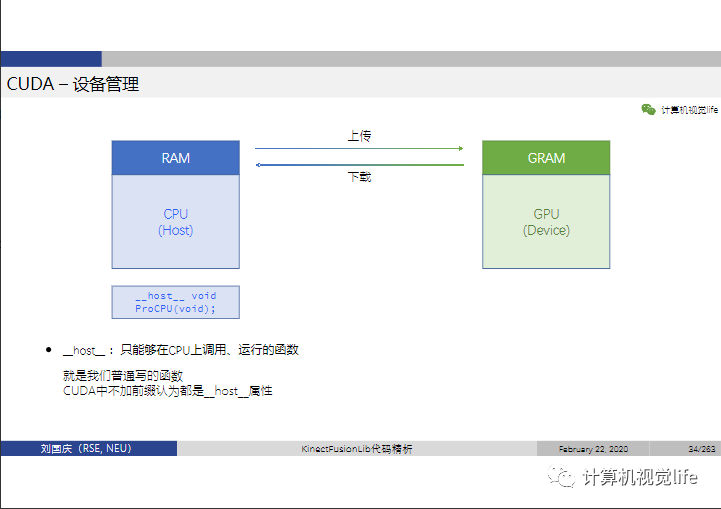
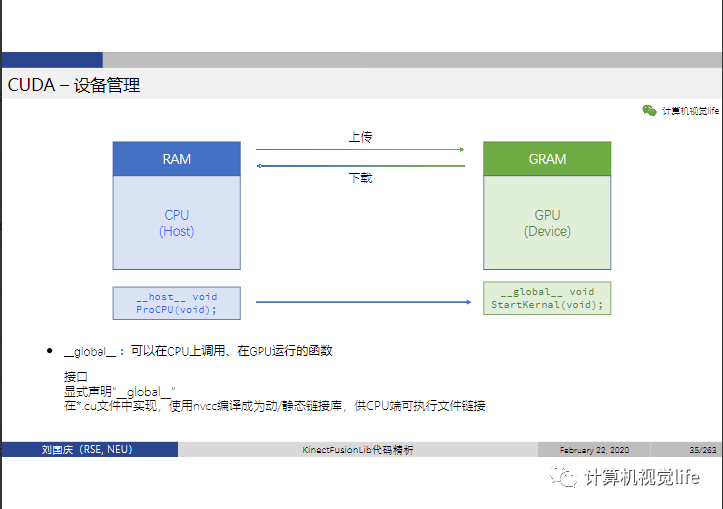
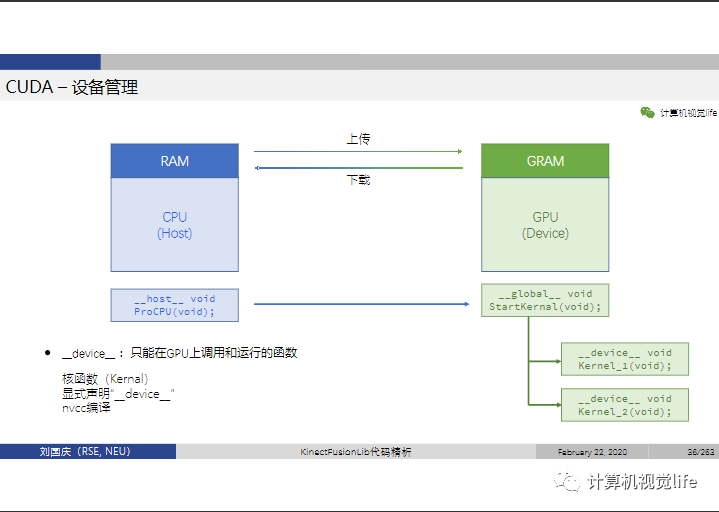
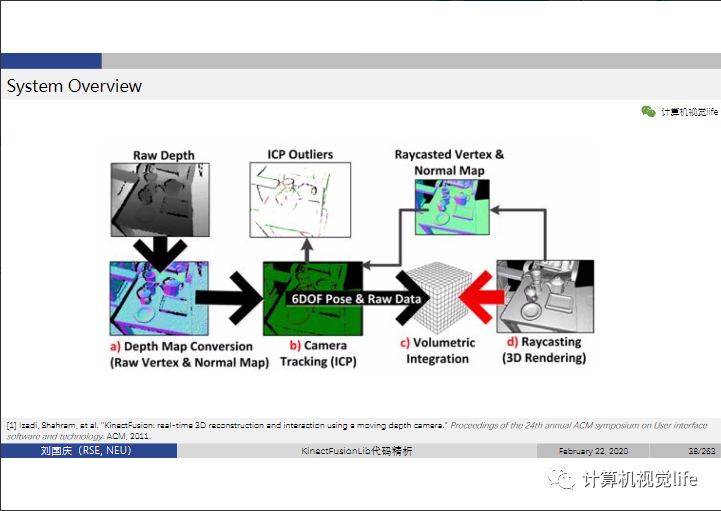
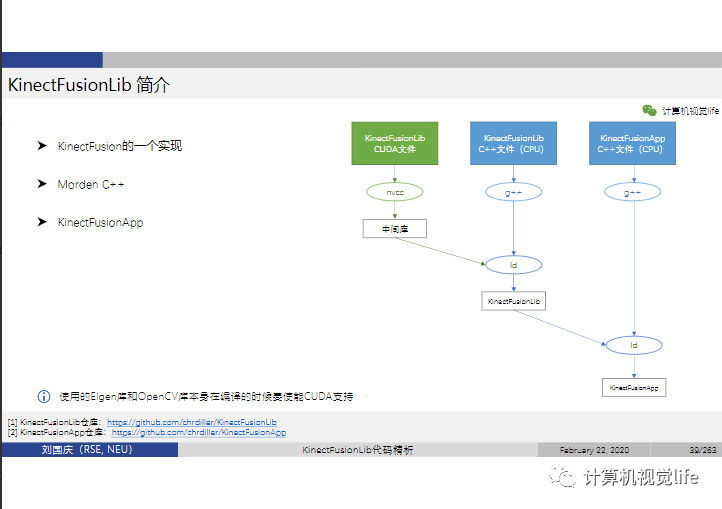
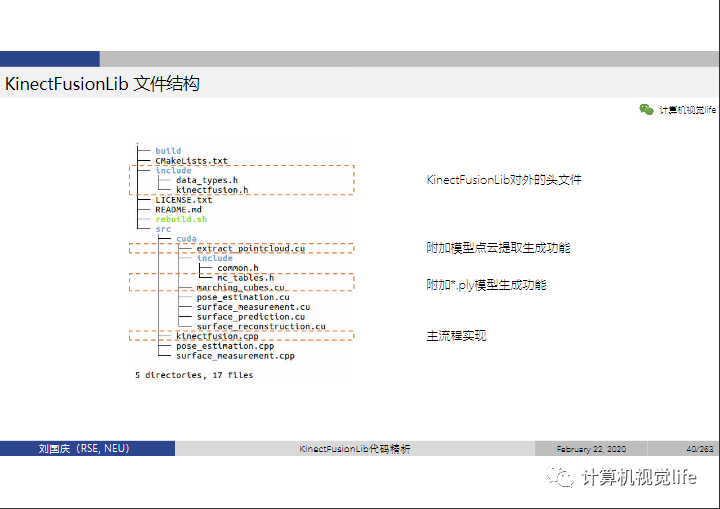
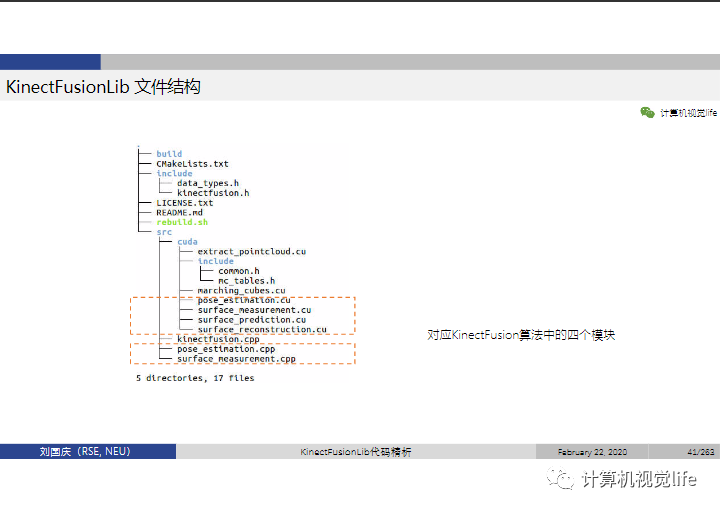
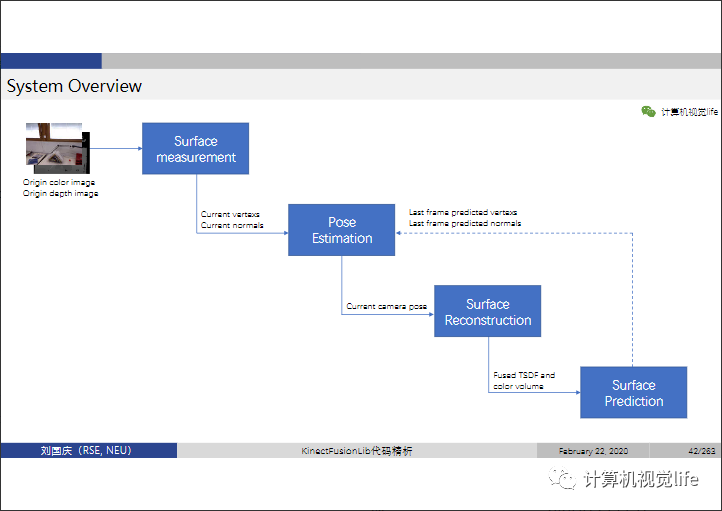
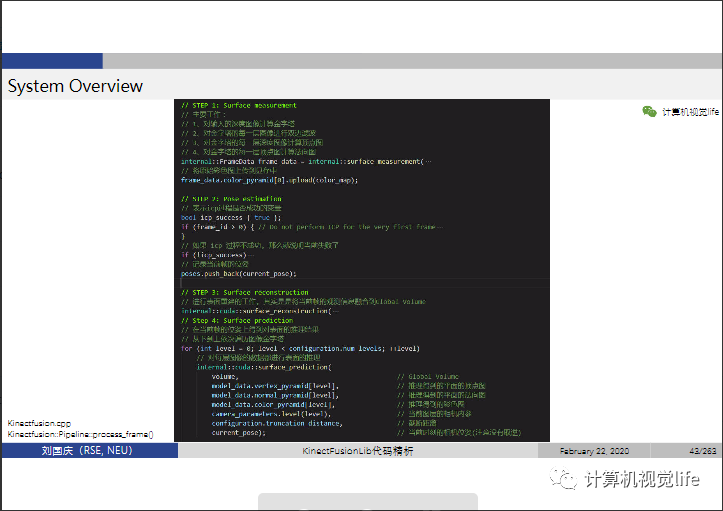
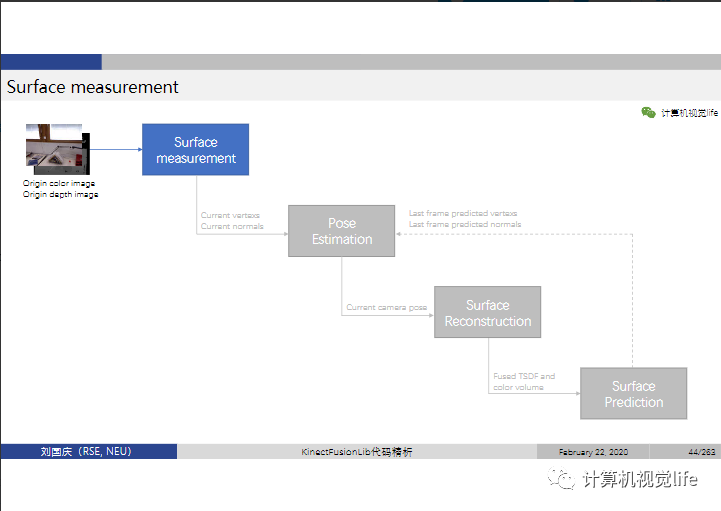
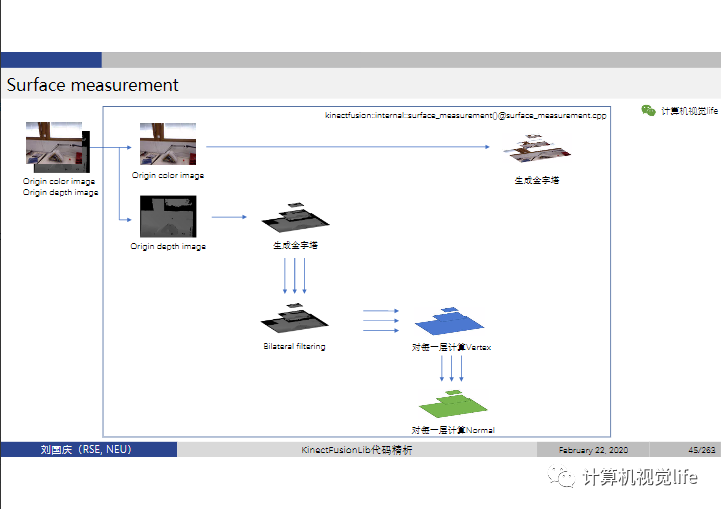
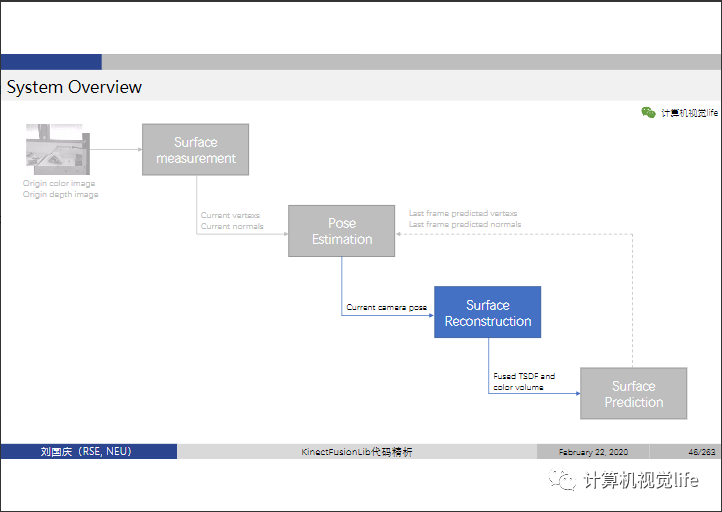
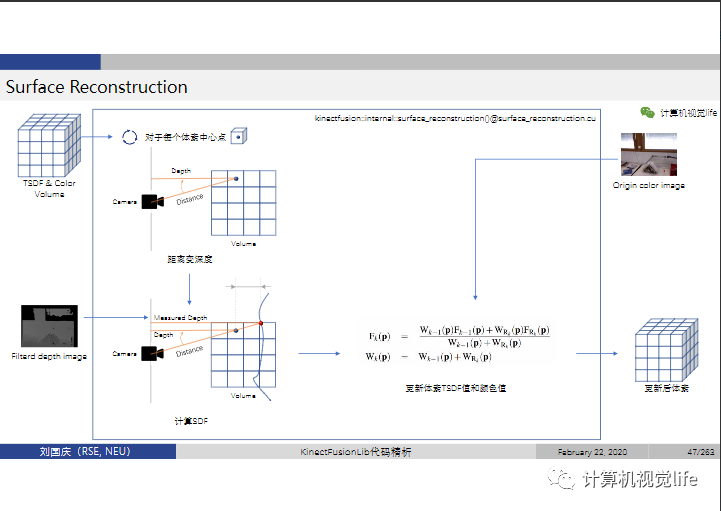
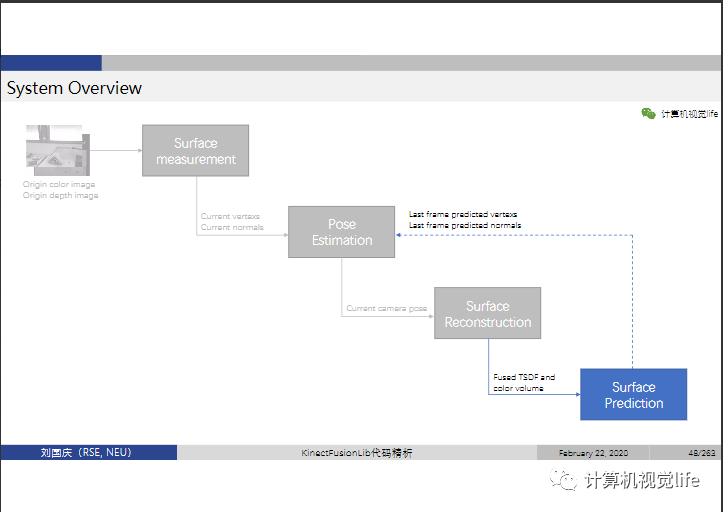
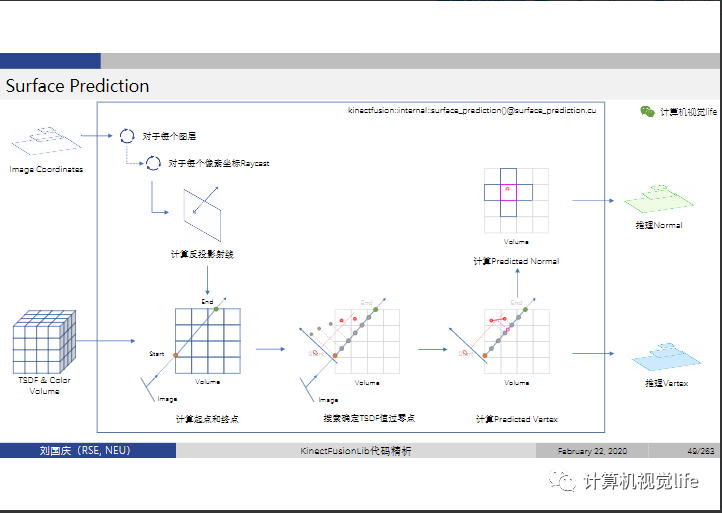
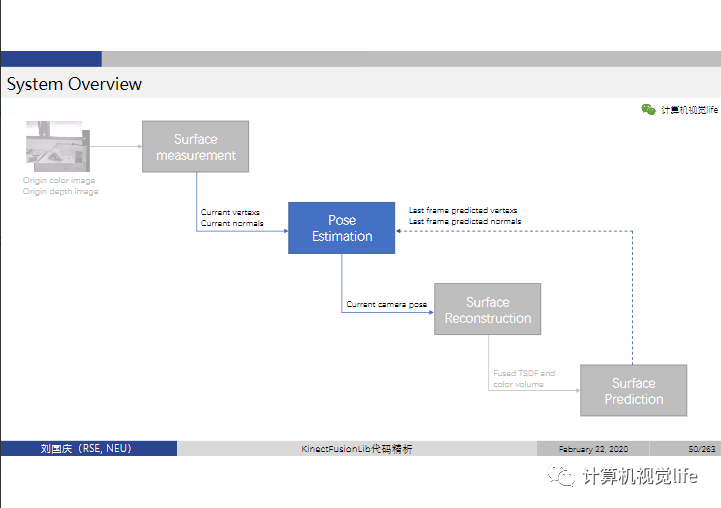
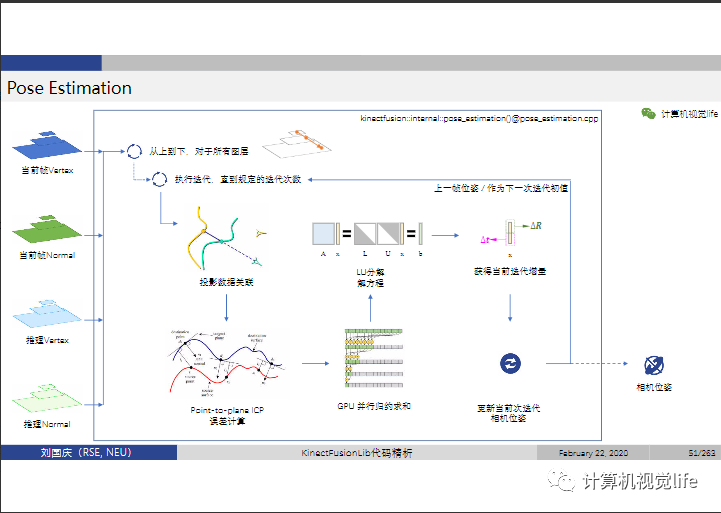
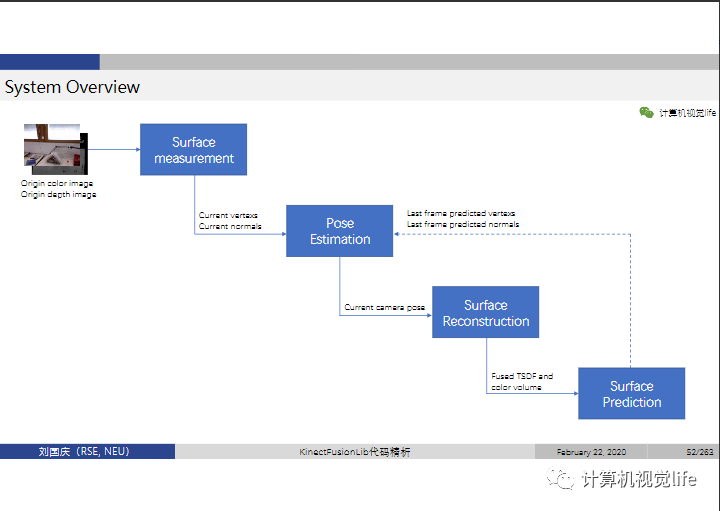
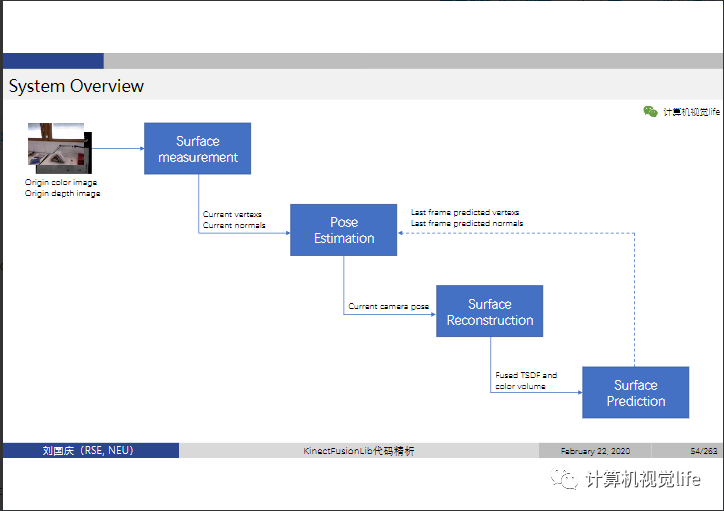
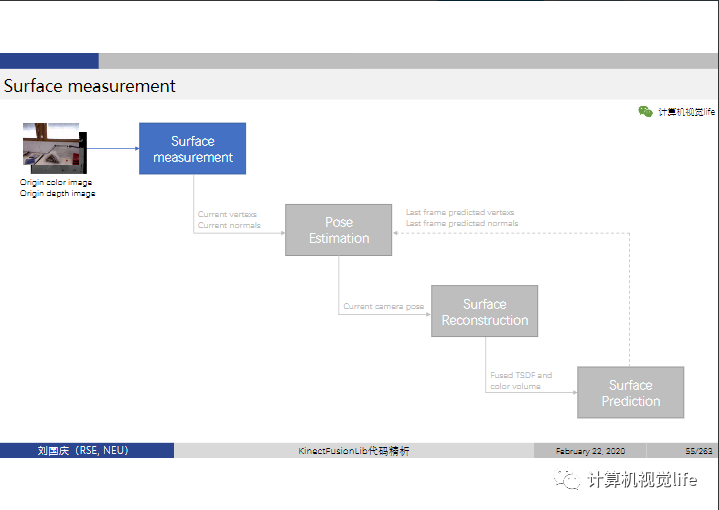
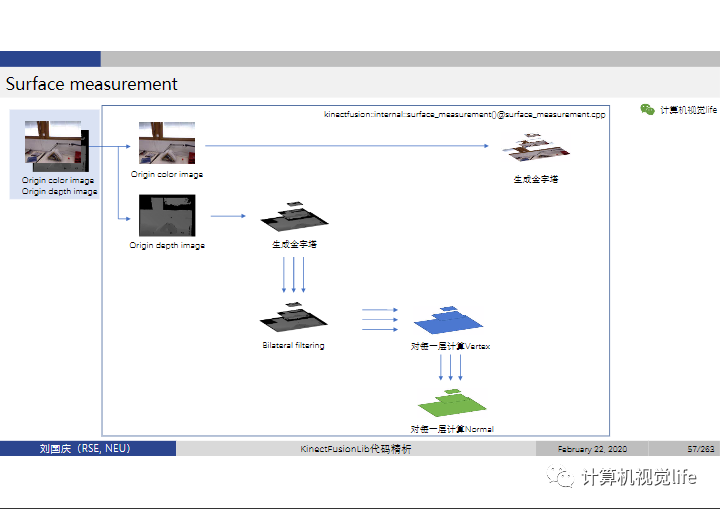
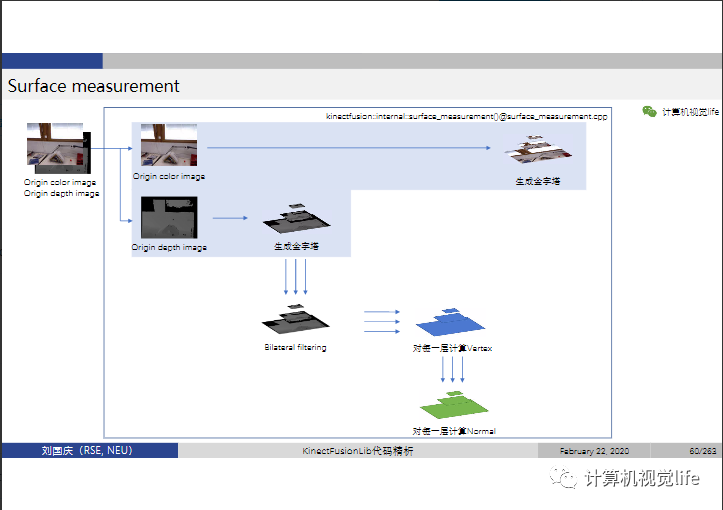
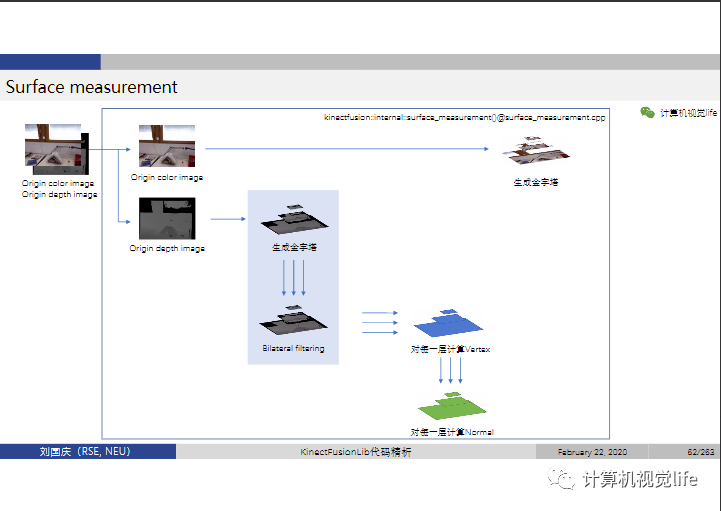
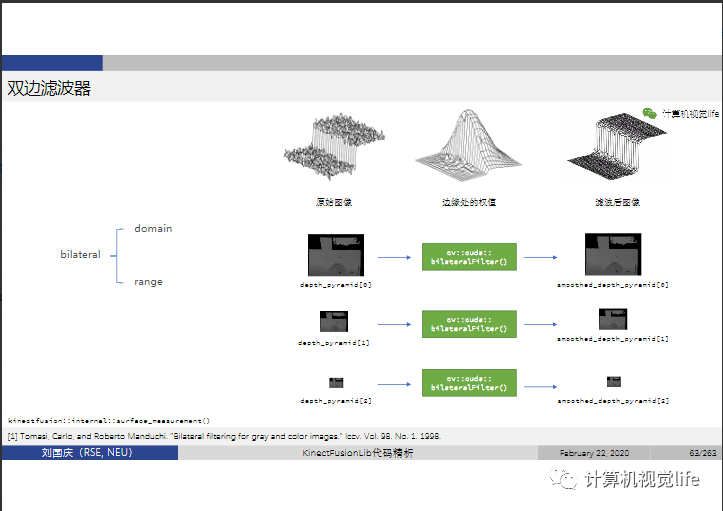
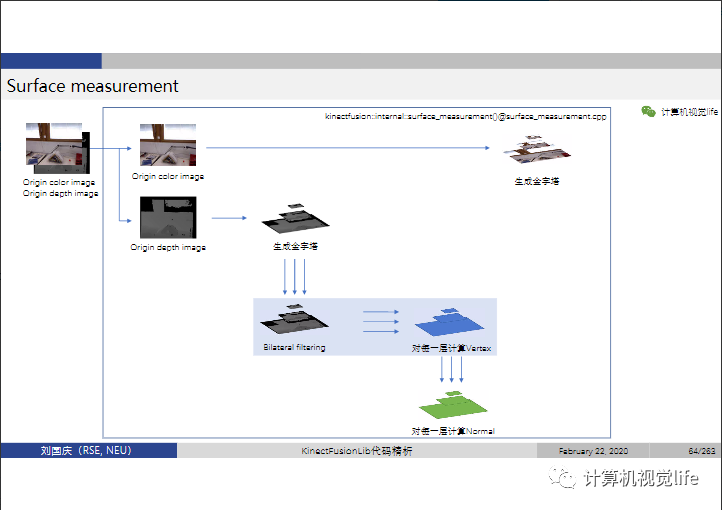
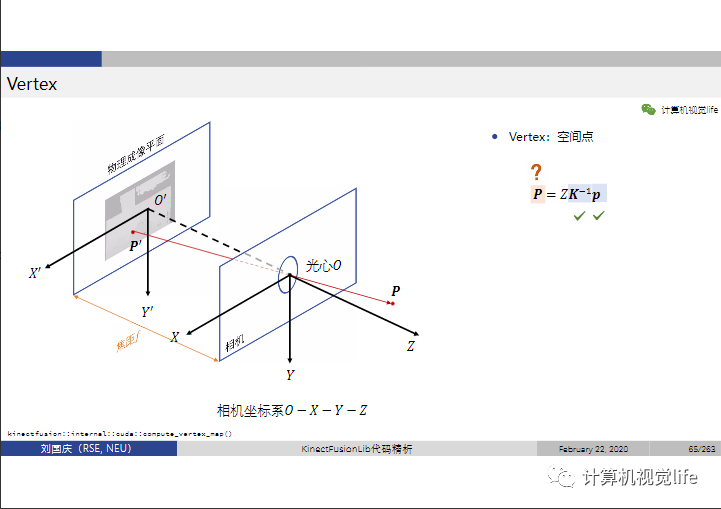
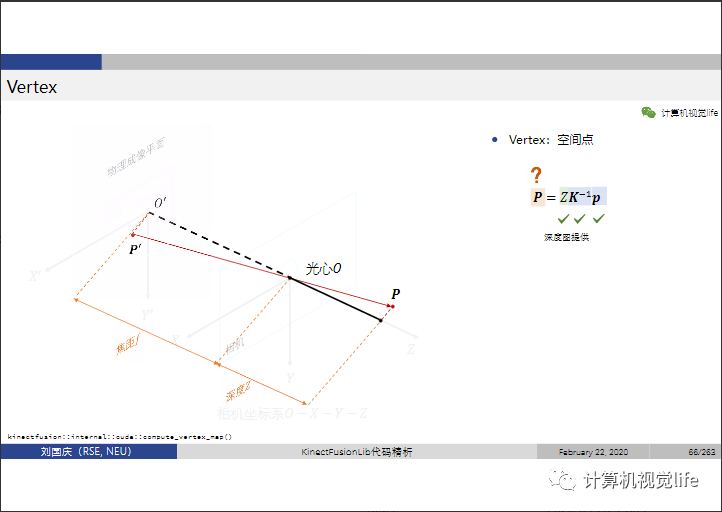
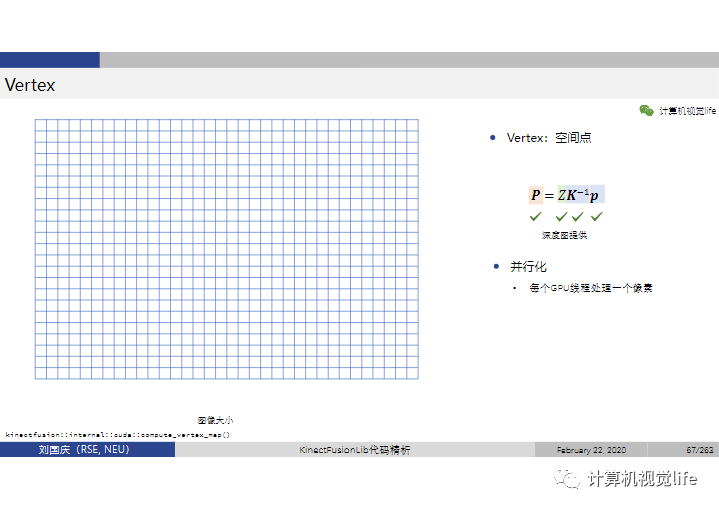
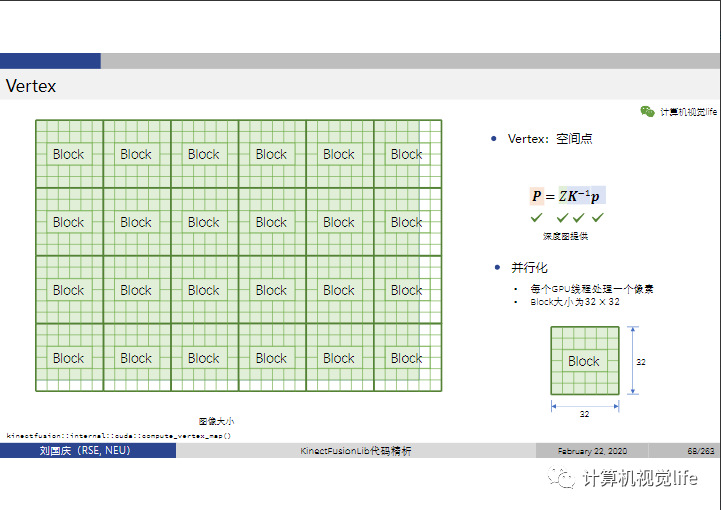
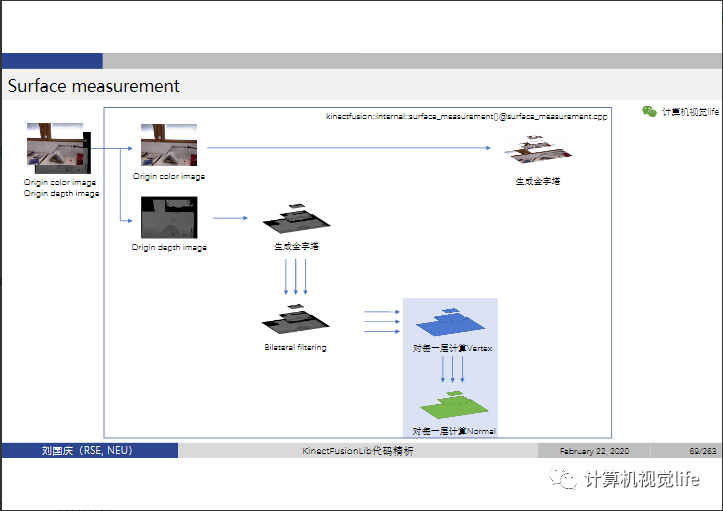
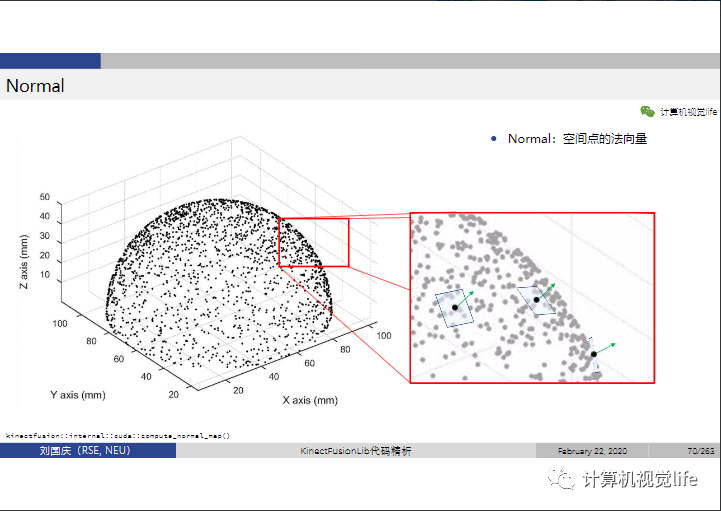
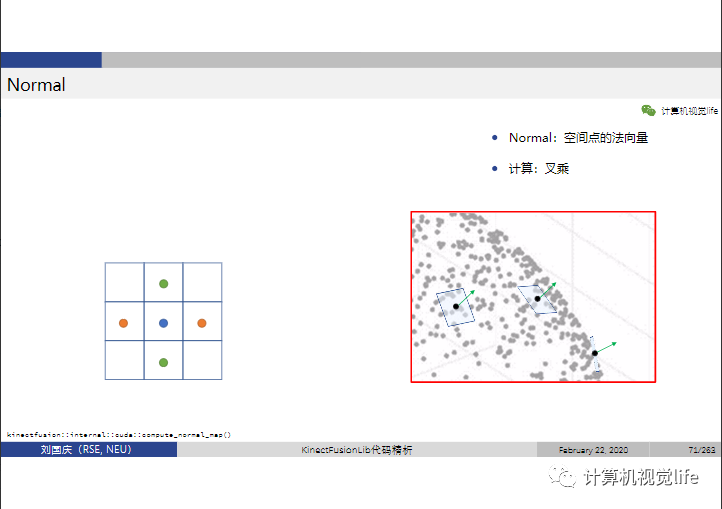
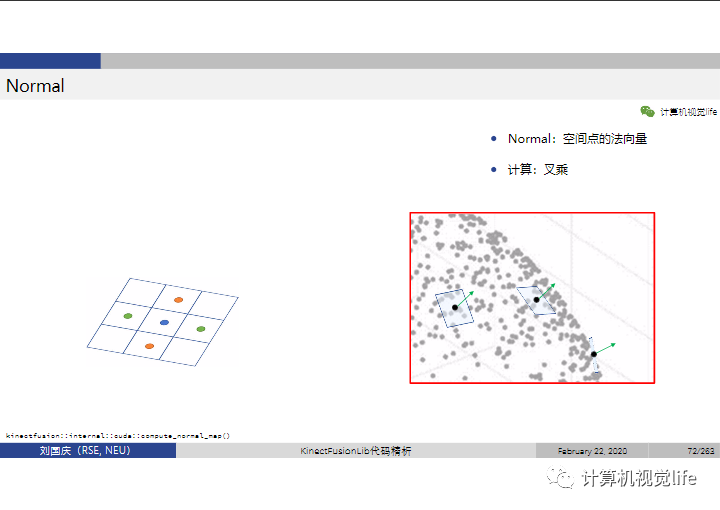
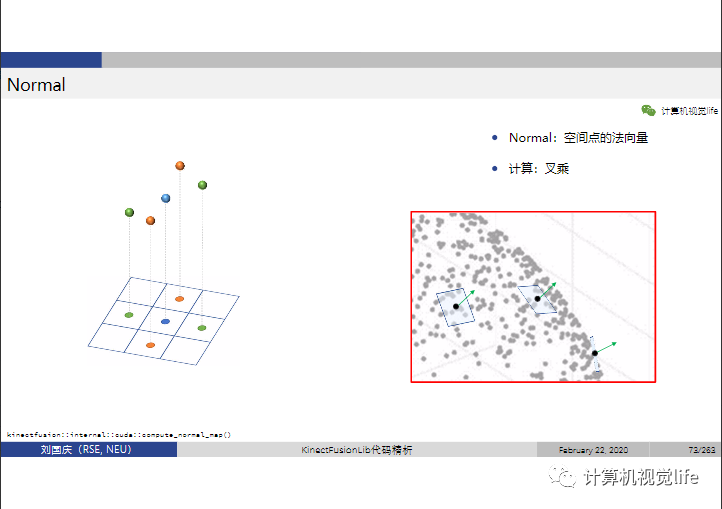
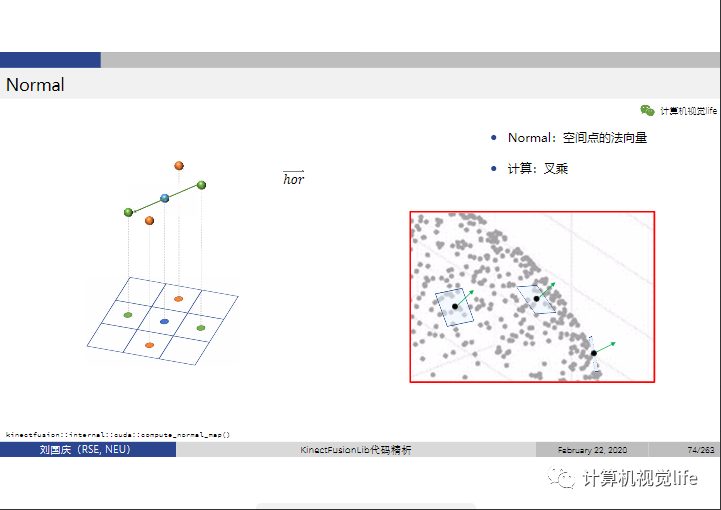
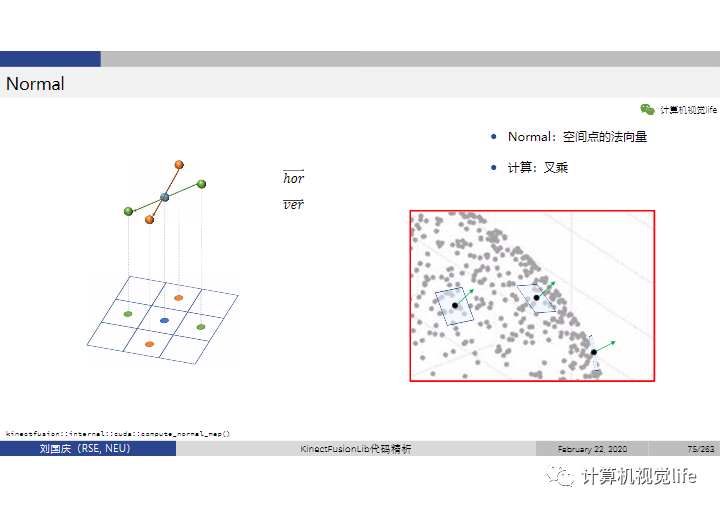
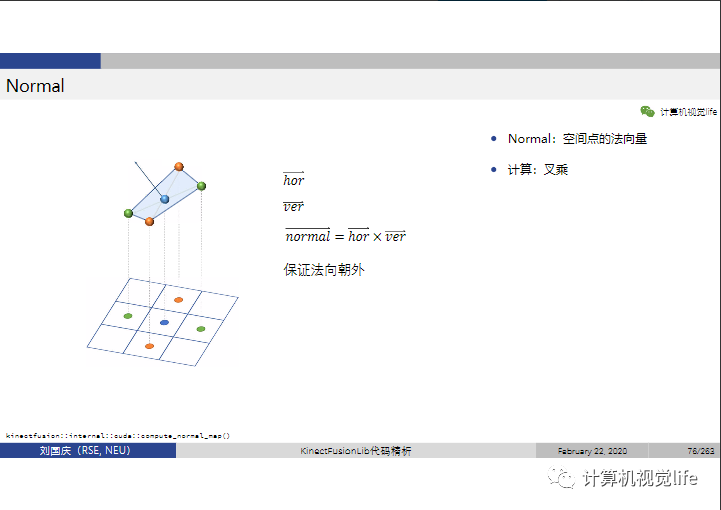
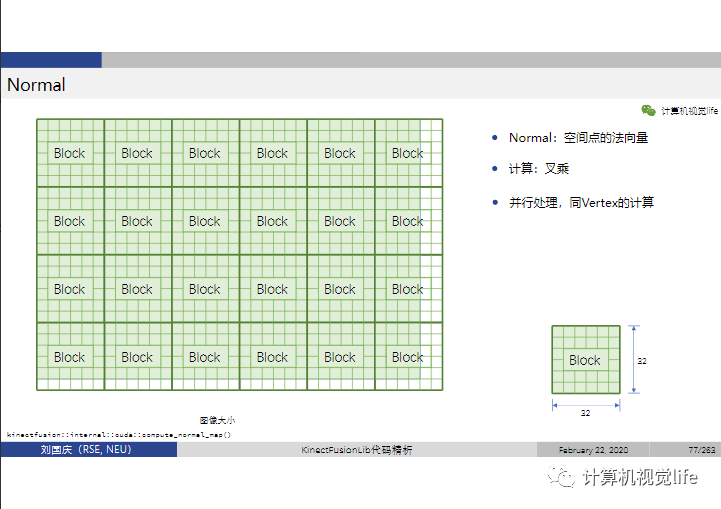
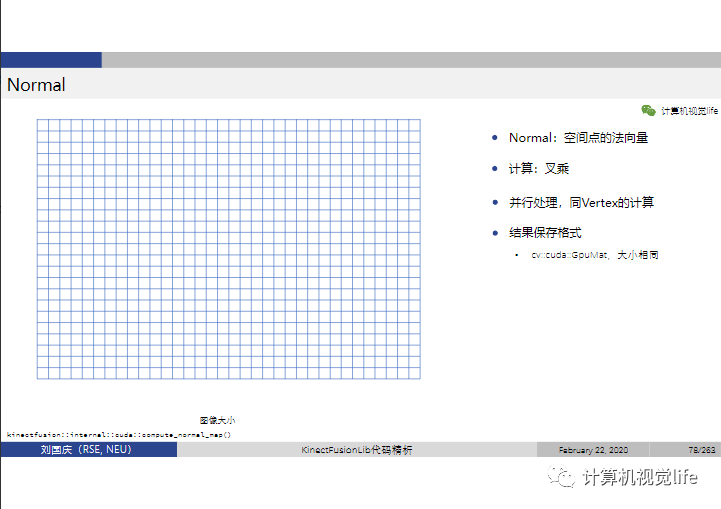
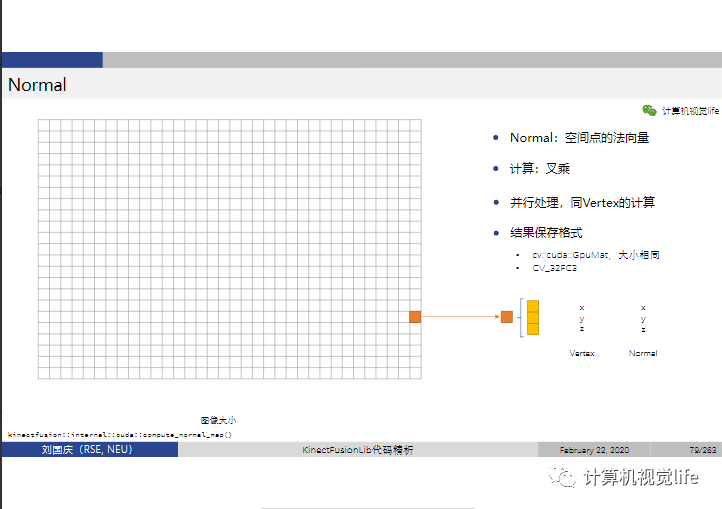
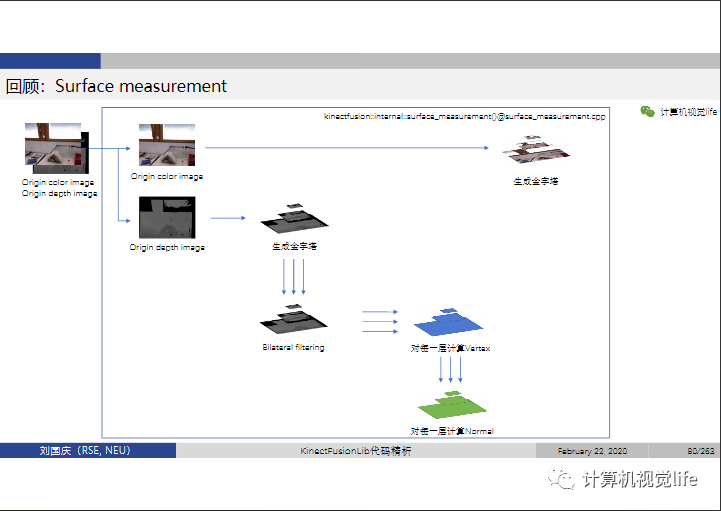
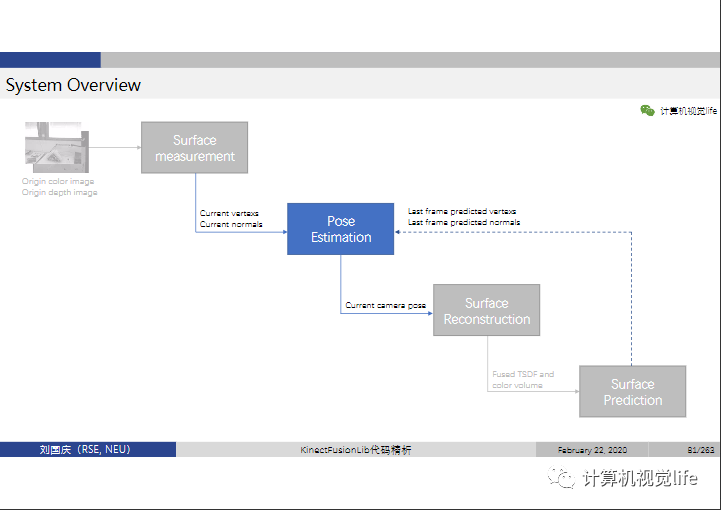
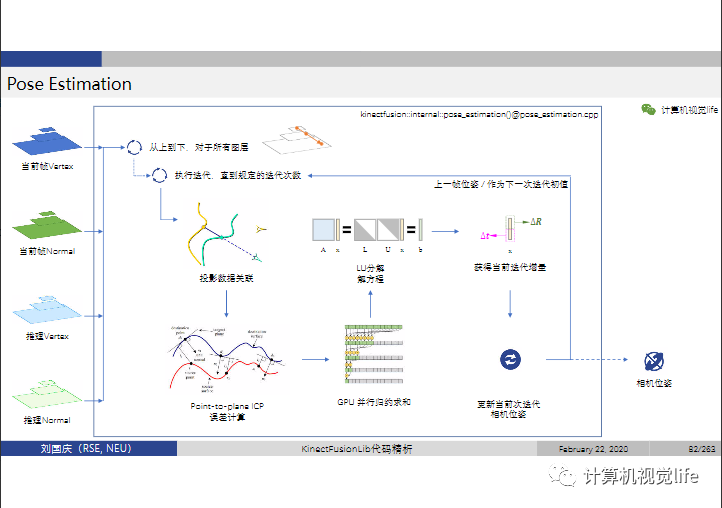
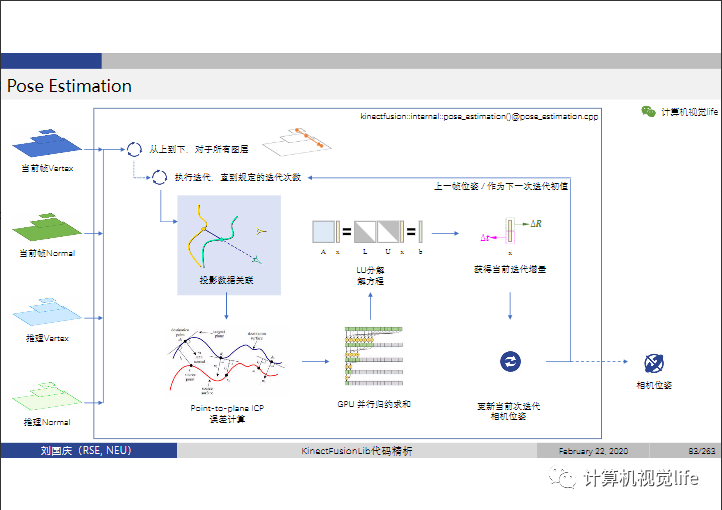
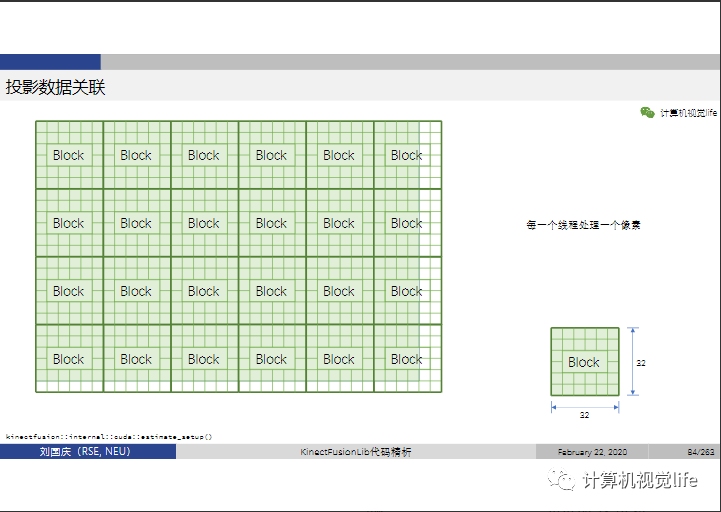
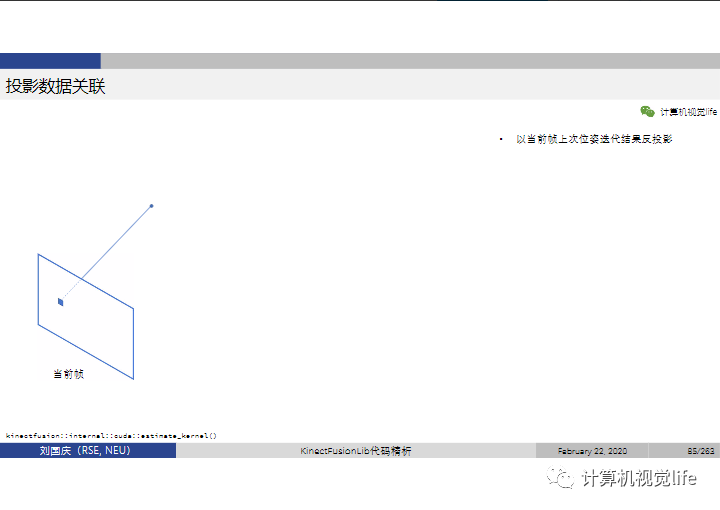
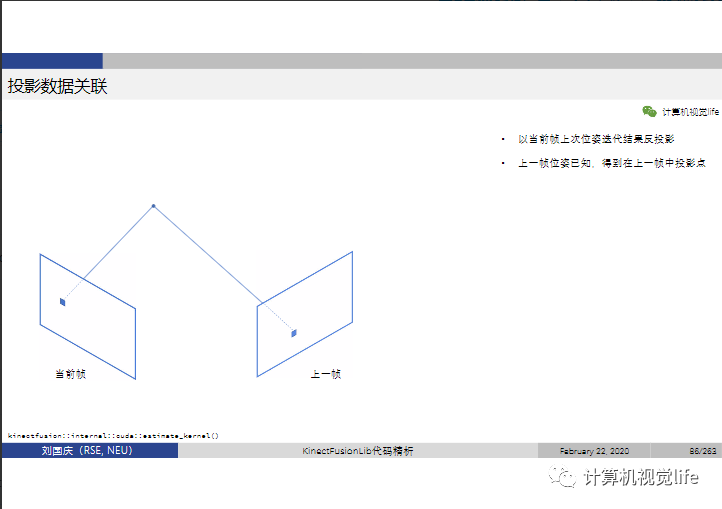
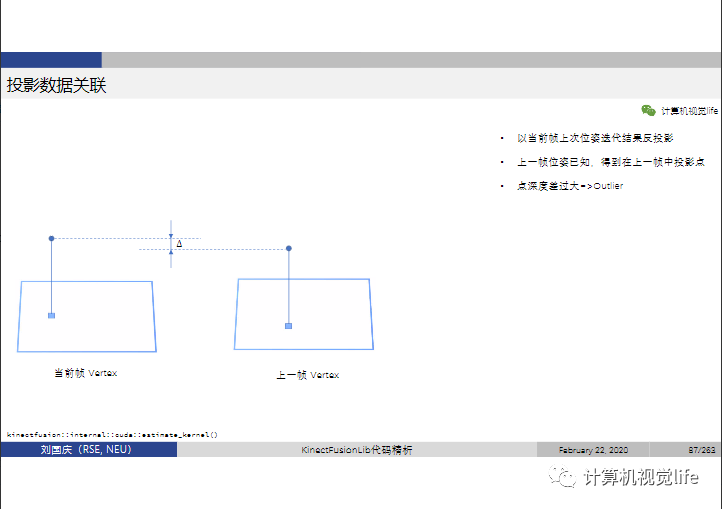
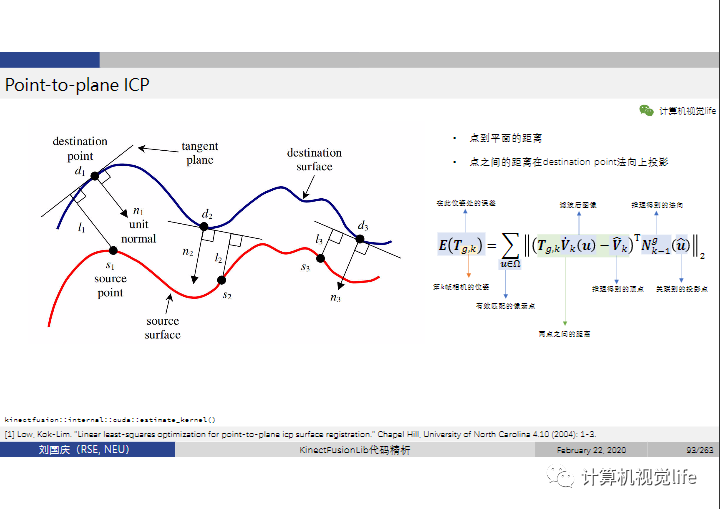
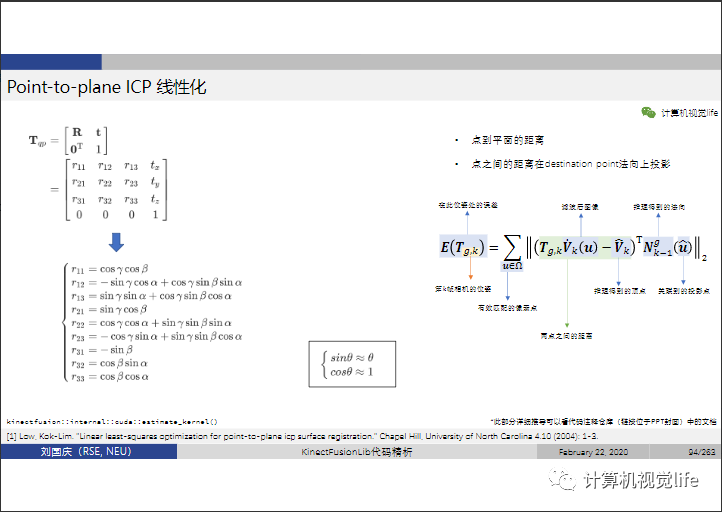
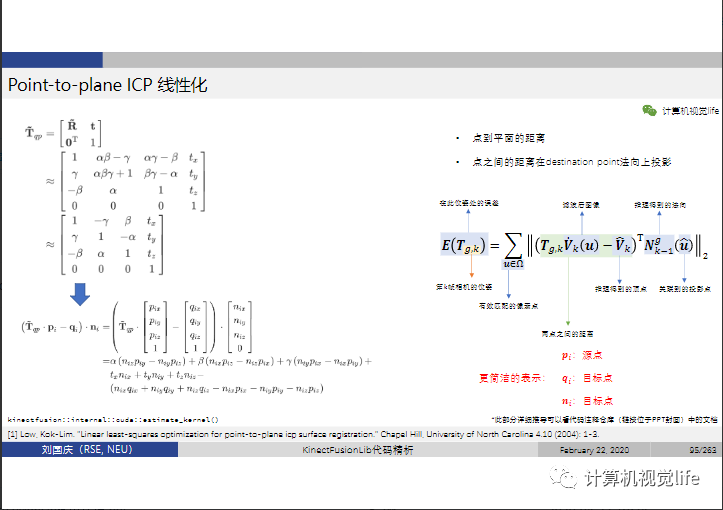
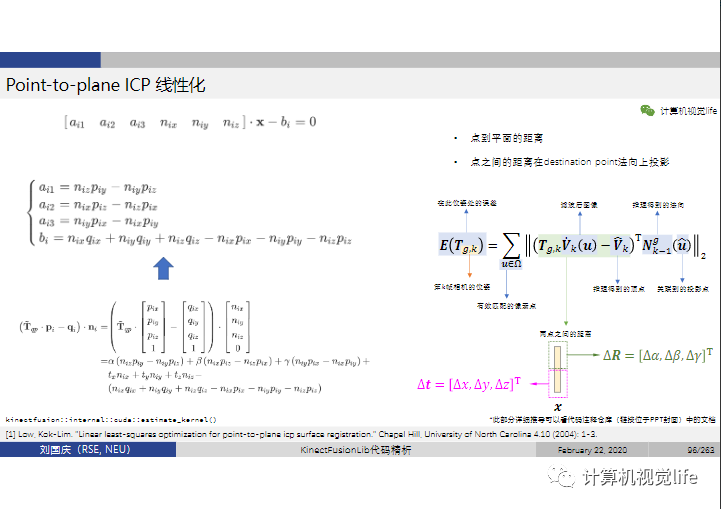
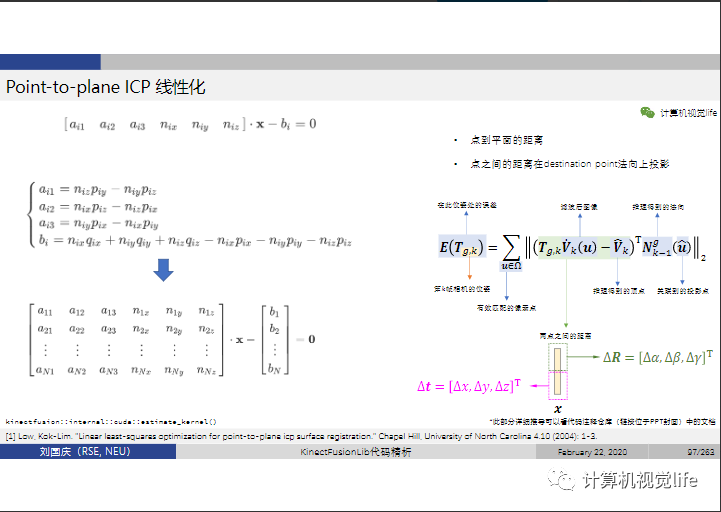
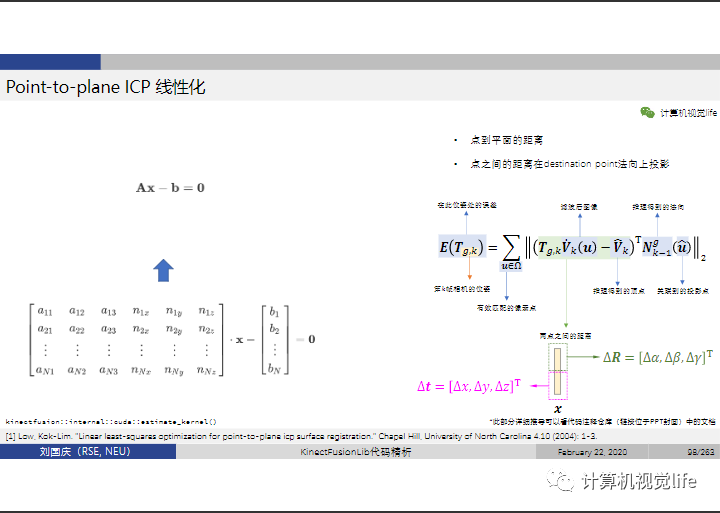
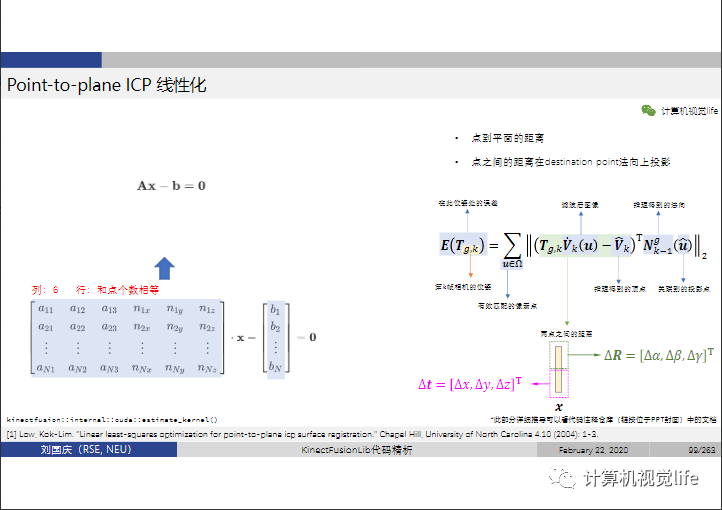
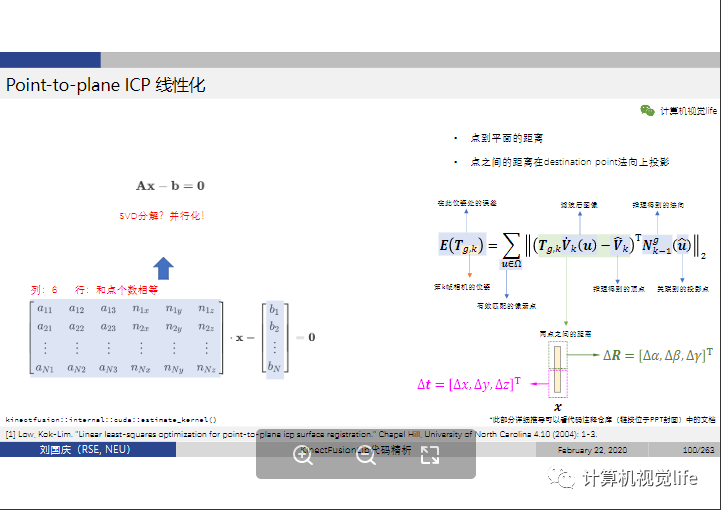
内容:介绍最经典也是最简单的稠密SLAM系统——KinectFusion,以其中的KinectFusionLib实现的代码为例,简要介绍CUDA并行计算基础,并深入窥探KinectFusion中Surface measurement、Pose Estimation、Surface Reconstruction和Surface Prediction的算法思想。
视频 录像
视频PPT
















从0到1学习SLAM,戳↓

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓

分享给更多的朋友

登录查看更多
相关内容

Arxiv
0+阅读 · 2020年11月25日
Arxiv
4+阅读 · 2018年3月9日
Arxiv
12+阅读 · 2018年1月29日
Arxiv
4+阅读 · 2018年1月23日
相关主题




相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2020年11月25日
Arxiv
4+阅读 · 2018年3月9日
Arxiv
12+阅读 · 2018年1月29日
Arxiv
4+阅读 · 2018年1月23日