终于甩掉“小尾巴”!哈佛明星RoboBee再登《Nature》封面,太阳能电池供电能自由飞行
导读
最新一期的《Nature》杂志封面上,刊登了一只直立形态的四扑翼微型机器人RoboBee X-Wing。作为RoboBee的进化产品,这款哈佛出品的微型机器人并不是第一次登上世界顶级期刊,而此次它能够荣登《Nature》封面,则是因为它终于摆脱多年以来背后诟病的托在身子后面的导丝(供电线),成为仅依靠太阳能便自由非常的真正飞行器。
作者:溪岚
编辑:小木
2012年,哈佛大学教授Robert Wood团队所研发的第一代RoboBee问世,它拥有每分钟能扇动120次的翅膀,和只有86毫克的体重,比一只真正的蜜蜂还要轻。这款机器人在当时被认为是仿生机器人界的得意之作,并被科学家们预测未来可以代替蜜蜂完成授粉工作,或者作为一个微型飞行机器人完成侦查工作。
时隔多年,被科学家们普遍看好的RoboBee虽然在哈佛学霸们的不断努力下不断升级且频繁登上各大顶级期刊,但还是没能完成他们当时预期的工作,甚至RoboBee还不能飞出实验室。原因只在于,拖在RoboBee身后,用来提供能源的细长的“尾巴”。
这也是多年以来RoboBee备受诟病的弱点所在。但无奈受限于RoboBee自身扑翼的大小及对整体机身重量的要求,笨重的电源只能被搭载到体外,才能满足它的飞行要求。

而现在,《Nature》上发布的这只新型RoboBee终于甩掉了烦人的“小尾巴”,改换了动力源,可以没有束缚地自由飞行了!

新一代RoboBee是怎样做到登上《Nature》封面的呢?
如果去掉了电源线,那么要用什么来提供动力呢?
答案是:太阳能电池。
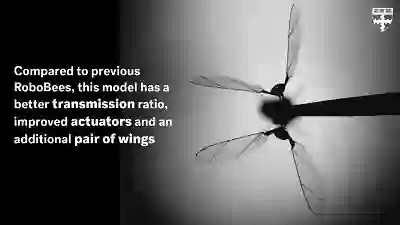
研究人员改进了它的执行器和传动比,让它能够拥有更大的升力,足以携带多出的太阳能电池和机载电子设备。为了容易分辨,Robert Wood团队还给了它一个新名字:RoboBee X-Wing。
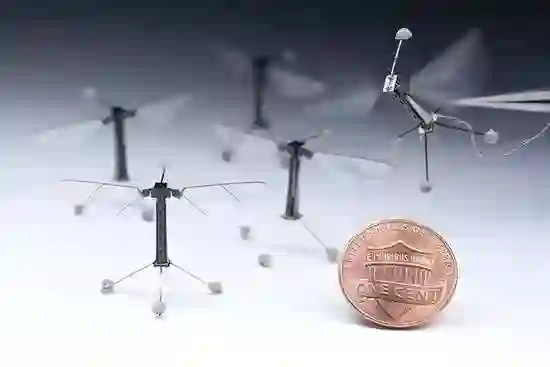
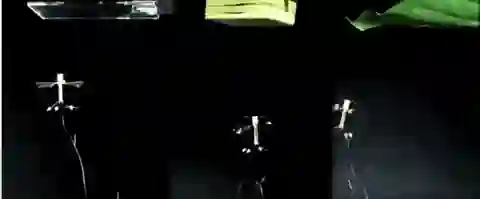
RoboBee X-Wing长5厘米,重259毫克,其中本体的重量只有90毫克,其余为电池和电子设备的重量。据研究人员介绍,这是迄今为止最轻的飞行器,只要有光源,就能够持续不断地飞行。
在飞行系统的选择上,X-Wing使用的是四扑翼系统,这使机器人拥有比固定翼和旋翼更好的机动性、灵活性,并且当它撞到人或物体时,造成的伤害也会更小。比初代多增加的两只翅膀则是为了增大机翼面积,使效率提升了30%。

它的顶部装配了6块约10毫克重的太阳能电池,能够提供120毫瓦的电能,足以驱动这个小巧的机器人。与点亮一串LED灯的其中一个灯泡相比,驱动X-Wing所需的功率还要更低一些。

它的底部则悬挂着一块轻量的电路板,能够将太阳能电池的电源提高到200伏,为四扑翼系统所需的集成压电材料提供足够的电压,以使机器人拥有较强的升力,以携带这些多出的零件。
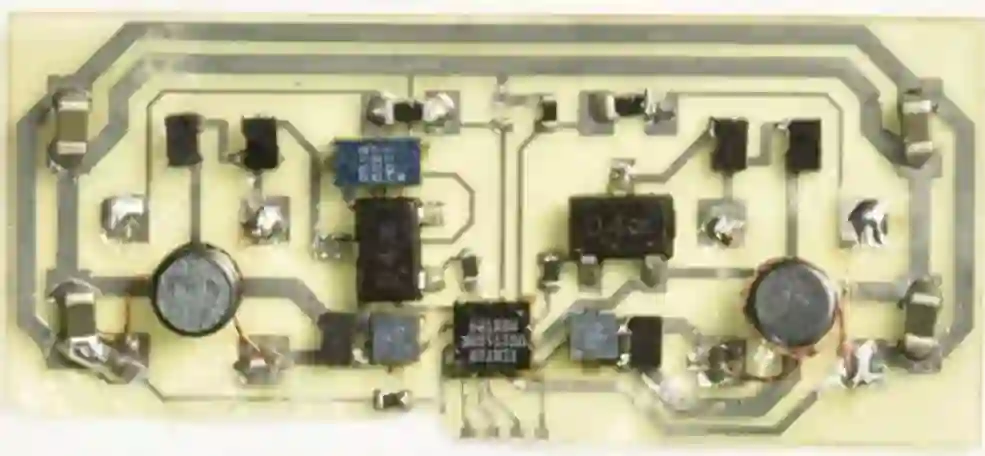
同时,研究人员还优化了压电材料的机械传动,这样一来,不但改善了压电材料一直存在的缺点,以免对机器人施加巨大的力的同时产生微小的位移,也使机器人的两对翅膀能够稳定地以200赫兹的频率摆动。
如此,RoboBee X-Wing就拥有了一个又瘦又长的结构,既能将重心保持在翅膀所在的中部,又能够让太阳能电池板远离翅膀所带起的气流,不致失去平衡。

缺点仍然存在
其实,哈佛团队并不是第一个让RoboBee卸掉小尾巴的人。之前大讲堂也介绍过华盛顿大学Sawyer Fuller教授的团队所研发的RoboFly,这位从哈佛走出去的教授改进了原有的RoboBee,是它能够依靠激光提供能源,完成极小范围内的飞行。
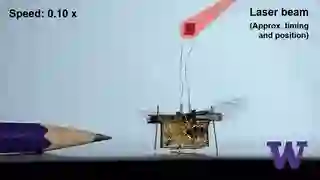
当激光光束照射到机器人顶部的光伏电池上时,光能将会转化为电能,使机器人的翅膀拍打起来,完成一小段距离的飞行。不过小编觉得,与其说是飞行,还不如说RoboFly就是蹦跶了一下。反观一年后出现的这款RoboBee X-Wing,能够不费劲儿地在空中待上好一会儿,这才能算得上是飞行。
但有进步并不代表它就已经做到了完美,X-Wing的飞行系统依然存在着一些缺点。
比如说,为了不增加负重,机器人并没有安装任何的控制系统,又没有电源线的牵制,一旦升空,基本上就可以说是“撒手没”。
其次,理论上来说,只要有阳光,它就可以持续飞行。但目前,据研究人员介绍,X-Wing大约需要3个太阳级别的光照来提供动力,一个太阳是远远达不到要求的。
因此,X-Wing目前还只能依靠研究团队用来替代太阳的强光灯进行活动,而无法在户外运行。研究团队表示,他们下一步会将机器人的尺寸增加25%,同时将其所需要的太阳光照级别降至1.5倍,但这距离X-Wing能够真正在户外自由地飞行还是有一定的差距。
不过至少它让我们看见了无线持续飞行器的可能性,想必研究人员最终也一定会将只需要一个太阳的RoboBee带到我们面前,欣赏一下RoboBee X-Wing的视频,期待那一天的到来吧!
RoboBee的进化史
别看RoboBee体型小巧,看起来微不足道。它却有着很多人都艳羡不已的光荣简历。
追溯其历史可以从遥远的2008年说起,如今哈佛大学微型机器人实验室负责人Robert J. Wood教授在当时确定了RoboBee的研发项目,并以自然界中的大黄蜂(体重120mg,扑翼频率180~250Hz)为仿生对象,设计了一款体重仅80mg,扑翼频率在120~260Hz之间的微型机器人,并验证了这款微型扑翼机器人能够在垂直方向上起飞。
初登《Science》:2012年,经过5年的潜心研究,一篇关于RoboBee的文章发表在顶级期刊《Science》上并被科技圈熟知,此时的RoboBee实现了真正‘无人机’的功能,不仅能够平稳起飞,还可以做一些悬停和路径追踪的动作。

二登《Science》:2016年,关于RoboBee的另一篇《Science》文章发布,此时的RoboBee头上戴了一个类似于‘草帽’的电极,这个电极帮助微型机器人吸附在大多数物体表面,甚至包括玻璃、木头,以及柔软的树叶,这是以前任何一款飞行器都无法做到的,对于仿生机器人来说意义深远。
三登《ScienceRobotics》:2017年,一篇第一作者为中国学者的哈佛博士生(陈宇峰)的论文,刊登在了机器人界顶级期刊《Science Robotics》上,此时的RoboBee突破了水的表面张力,实现了从水中跃升到空气中的能力。
而值得一提的是,早在2015年,陈宇峰博士已经通过流体力学的模拟,证明RoboBee可以通过改变扑翼频率,完成在水下游动的任务。
四登《Nature》:最近,还是这款小小的机器人又一次登上了《Nature》的封面,其实现的功能前文已经详细介绍这里就不再赘述了。
同一款小小的机器人,能够频繁的登录于各大顶级期刊,这在小编的认知范围内是及其少有的。从这也可以看出,RoboBee的每一次进步对微型扑翼机器人领域的重大意义。那么,你猜它的下一次突破会在哪方面呢?
END
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!





