科研|中科大陈小平教授:由一种嵌入吸盘的欠驱动手爪发展出的新的抓取模式
导读
本文主要是在一种嵌入吸盘的欠驱动手爪的基础上,提出了一种新的抓取方式——“半包裹抓取”。这种方式适用于抓取较小和较大的物体。本文对这种半包裹抓取进行了定义,并且分析了新的抓取方式抓取物体的适用尺寸和抓取力。在实验手爪上结合这种抓取方式,能够稳定的抓取手笔和足球。
作者:陈小平
编辑:机械工程学报

梦背景介绍
在非结构化的家庭环境中,抓取能力对于机器人来说至关重要。对于家庭服务机器人手爪的一个最基本的要求应该是能够抓取各种不同形状和不同大小的物体。毫无疑问,人的手有非常高的灵巧性,所以在家庭环境中表现的游刃有余。人的手具备的重要能力之一就是能够抓取尺寸很小的物体,比如钉子,水笔。同时也能够抓取较大的物体,比如足球,篮球。捏取和包裹抓取,对于机器人手爪来说是最常见的两种抓取方式。但在我们的实验中发现,在抓取较大尺寸的物体时,手爪所用的抓取方式有别于这两种方式。在之前的工作中,我们设计和分析了一种嵌有吸盘的欠驱动手爪。因此,本文在已有的手爪上提出和分析了“半包裹”抓取方式对应手爪在抓取较大物体时所呈现的抓取方式。
实验平台介绍:
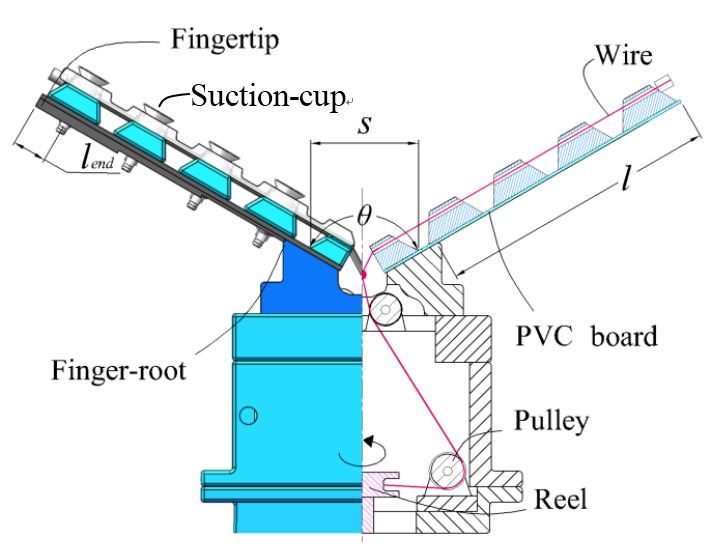
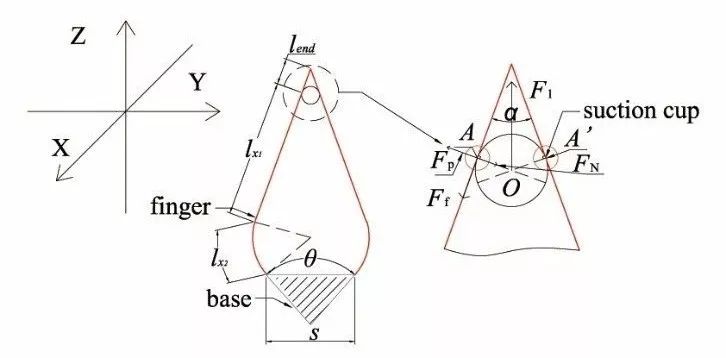
图1 手爪的CAD模型图和示意图
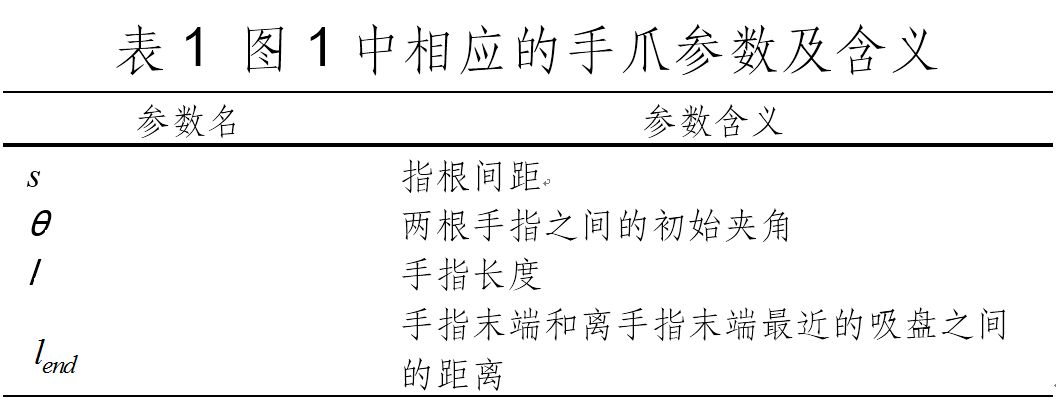
本文所有的分析和实验都是基于图1所示的手爪。图中的手爪参数的含义如表1所示。
新抓取方式的定义
当手爪在抓取较大的物体时,手爪给物体施加的力中有一个分力使物体有远离手爪的趋势。如果,手爪通过特定的机制能够抵消这个分力的作用,从而使手爪能够牢牢的抓住物体。比如通过吸盘的吸力或者电磁力等等。我们称这种抓取模式为半包裹抓取(Half-enveloping)。我们通过实验发现,对于我们的手爪,除了在抓取较大物体时使用半包裹抓取模式,在抓取小尺寸的物体时也会呈现半包裹抓取的特性。以下,我们将从抓取大物体和抓取小物体两个方面进行定义和分析。简单起见,分析时假设物体都是圆柱。

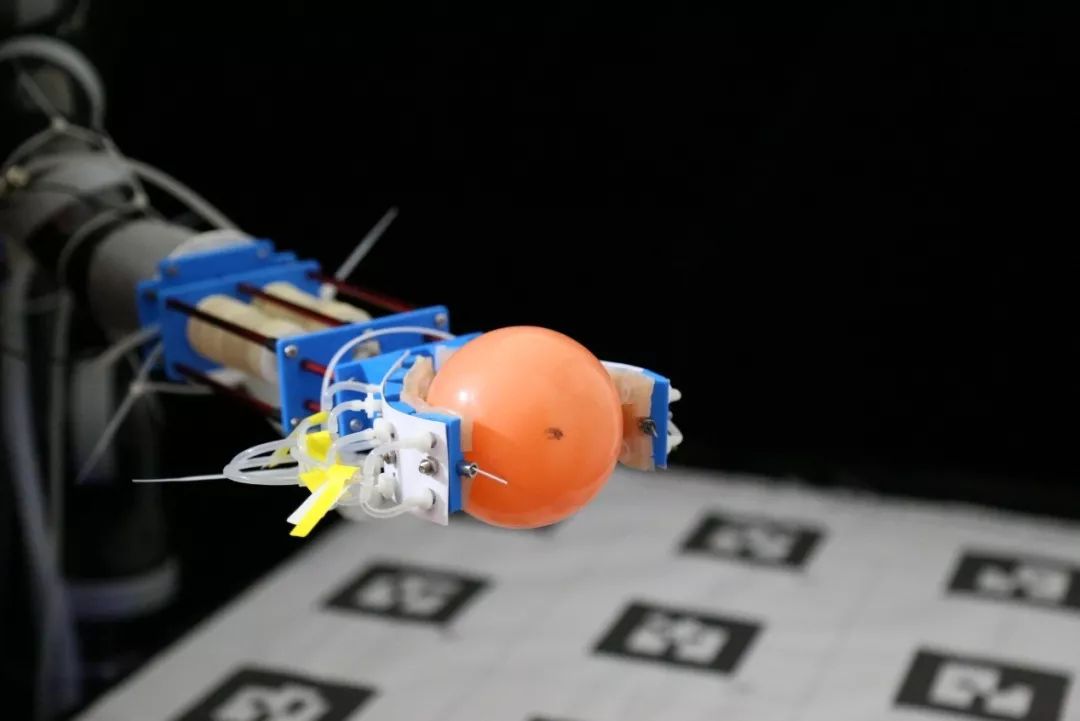
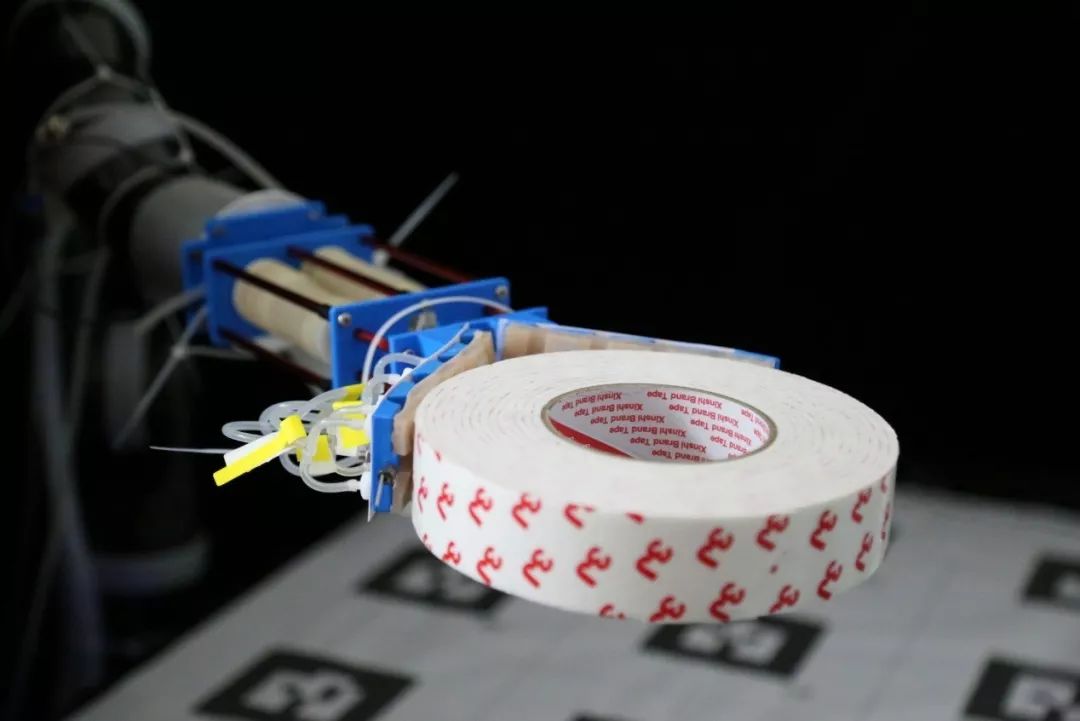
图2 抓取足球和水笔
大物体半包裹抓取(Big Object Half-Enveloping,简称BOHE):
在生活中经常会出现要抓取物体的尺寸比手爪的尺寸大的场景。就像图2(a)所示的抓足球一样。由于物体较大,手爪指根的运动会被物体所阻碍,此时只有指尖可以弯曲。在这种情况下,手爪在物体上接触点的连线时猎狐。并且如果此时只有抓紧力作用在手爪上的话,其中的一部分分力会使物体远离手爪。
小物体半包裹抓取(Small Object Half-Enveloping,简称SOHE):
另外一种会发生半包裹抓取方式的情形是抓取很小的物体,比如图2(b)中的水笔。抓取小物体时物体受的推动力受力方向与抓取大物体时相反,及此时物体有朝向手爪内部运动的趋势。
半包裹抓取模式尺寸分析
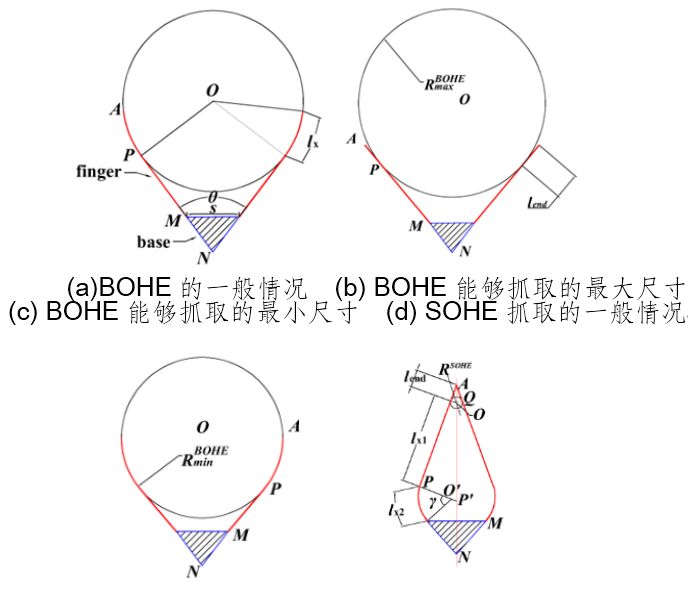
图3 BOHE和SOHE的抓取示意图
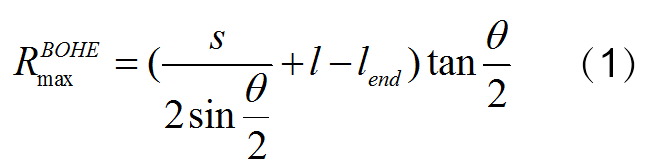
图3是BOHE和SOHE的抓取示意图,根据集合关系可以求得BOHE能够抓取的最大物体尺寸为:
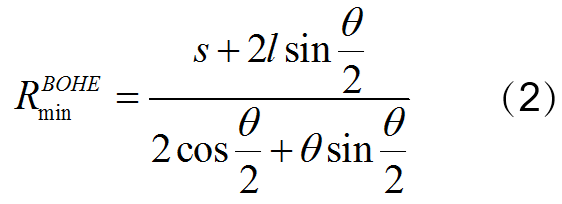
以BOHE抓取的最小物体尺寸为:
SOHE能够抓取的最小尺寸为:
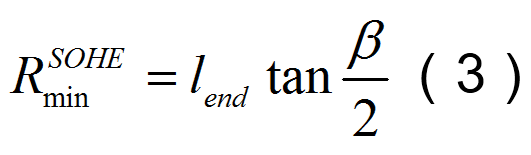
其中β=2γ-θ。
半包裹抓取的受力分析
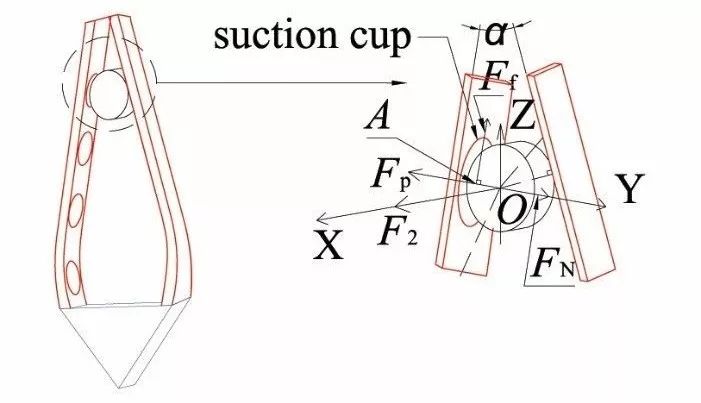
这部分是分析半包裹抓取模式的稳定性。主要是从物体的最大侧向稳定性和手爪在抓紧物体时能受到的最大竖直拉力两个方面进行分析。如图4(a)中的F1为竖直力,图4(b)中的F2为侧向力。
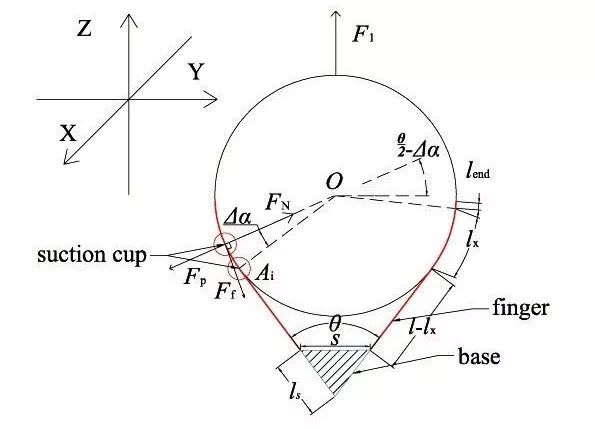
(a)BOHE竖直力的受力示意图
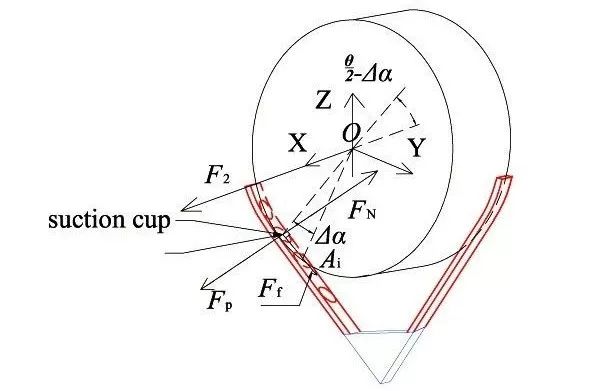
(b)BOHE侧向力的受力示意图
图4 BOHE的抓取受力示意图
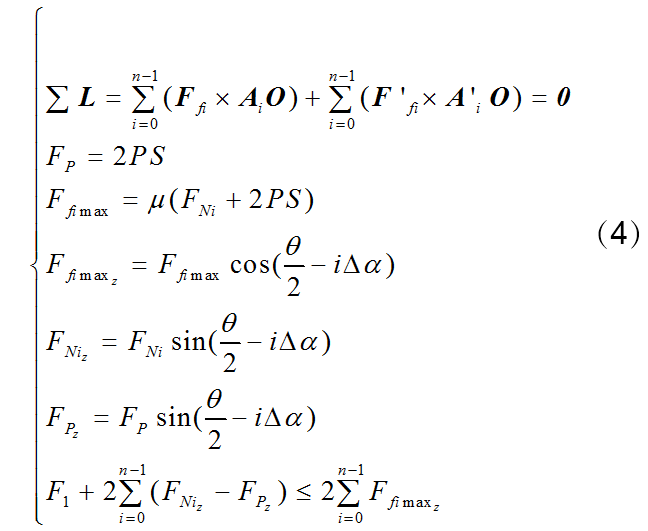
根据力和力矩的受力平衡可以得到下式:
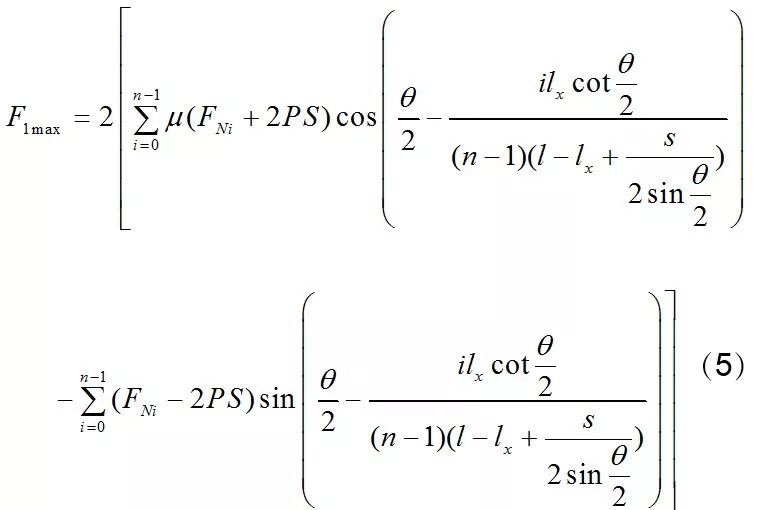
联立求解后可得F1的最大值为:
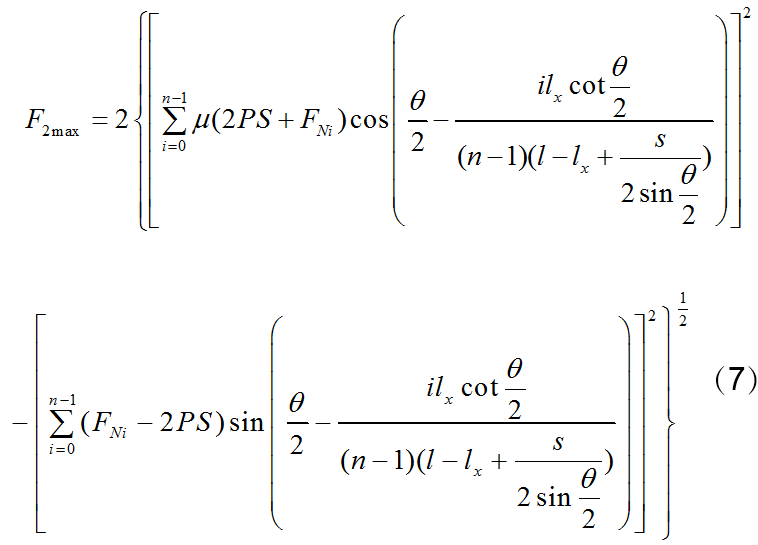
同理,根据F2的力和力矩平衡可得:
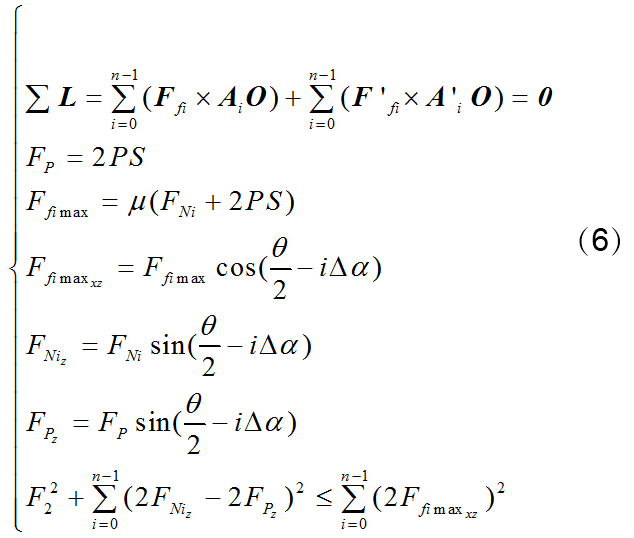
联立,可得F2的最大力为:
对于SOHE的受力情况如图5所示,
(a)SOHE竖直力的受力示意图
(b)SOHE侧向力的受力示意图
图5 SOHE的受力示意图
同理,可以求出SOHE的最大竖直力F1和最大侧向力F2为:
实验结论
我们通过改变不同尺寸的物体表面材质来测量出对应的抓取模式下能够承受的最大干扰力。实验中一共使用了四种不同的表面材质,分别是普通打印纸质、聚乙烯塑料、硅胶以及锡纸。
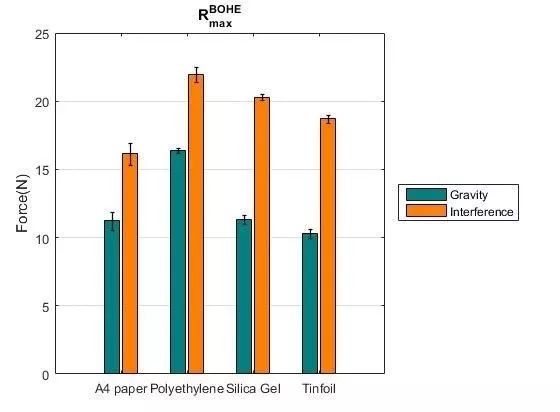
图6 在使用BOHE模式抓取最大物体尺寸时的抗干扰能力
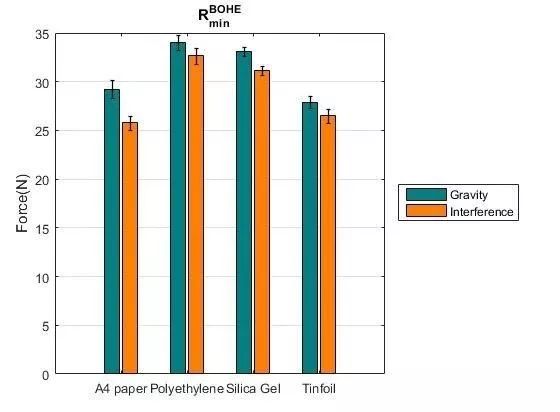
图7 在使用BOHE模式抓取最小物体尺寸时的抗干扰能力
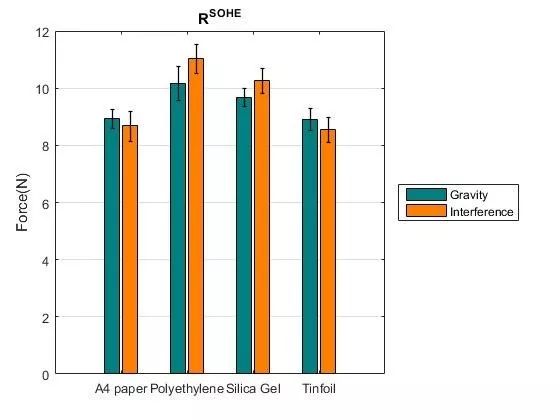
图8 在使用SOHE模式抓取最小尺寸时的抗干扰能力
图6,图7分别是在使用BOHE抓取最大最小尺寸物体时的抗干扰能力,图8是在使用SOHE模式抓取最小尺寸时的抗干扰能力。其中,
团队带头人介绍

陈小平 ,教授,博士生导师。1955年10月生于北京。先后获理学学士、工学硕士和工学博士,现任中国科学技术大学教授,国际RoboCup Federation 理事、Journal of Artificial Intelligence Research和Knowledge Engineering Review编委等,并曾任世界人工智能联合大会高级程序委员(IJCAI’09)和程序委员(IJCAI’07)、2008RoboCup机器人世界杯赛及学术大会(RoboCup’08)联合主席、美国人工智能年会(AAAI’05)以及AAMAS’06-08程序委员等。长期从事人工智能与机器人的交叉研究和教学。提出并较系统地发展了基于“归约蕴含”的认知建模技术。将自然语言理解和自动推理引入服务机器人,在国际上首次实现了一种能够完成复合任务的服务机器人通用机制。创建并领导中国科大机器人“蓝鹰”队,获四项世界冠军、七项世界亚军,2007年RoboCup机器人世界杯总成绩第一。从2011年开始进行柔性机器人的研究,目前涉及到柔性手臂、手爪和柔性驱动器等。是国内最早从事柔性机器人的单位。
END
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!





