决策树算法十问及经典面试问题
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
转载自Datawhale ,作者飞鱼
简介和算法
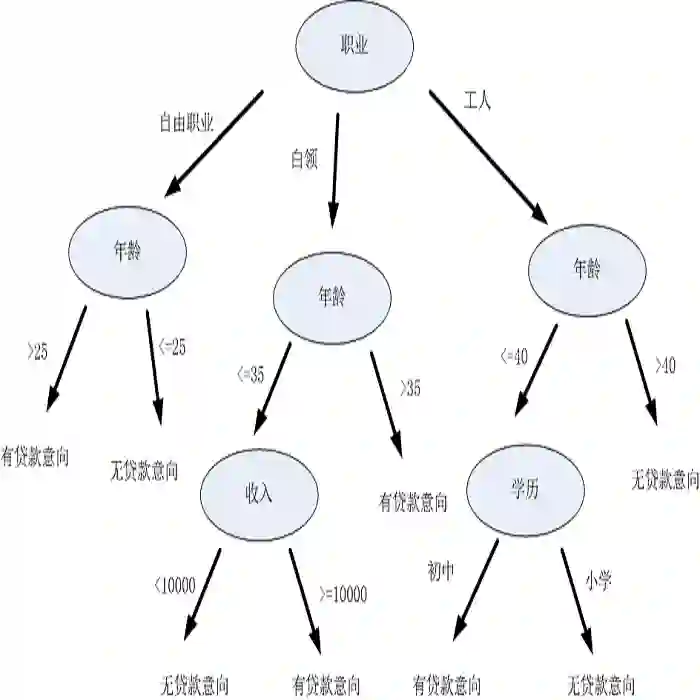
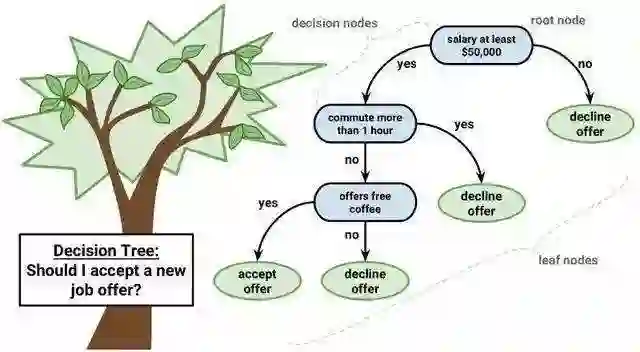
决策树是机器学习最常用的算法之一,它将算法组织成一颗树的形式。其实这就是将平时所说的if-then语句构建成了树的形式。这个决策树主要包括三个部分:内部节点、叶节点和边。内部节点是划分的属性,边代表划分的条件,叶节点表示类别。构建决策树 就是一个递归的选择内部节点,计算划分条件的边,最后到达叶子节点的过程。
伪代码: 输入: 训练数据集D,特征集A,阈值 . 输出: 决策树T.
-
如果D中所有实例属于同一类 ,则置T为单结点树,并将 作为该结点的类,返回T. -
如果 , 则置T为单结点树,并将D中最多的类 作为该节点的类,返回T. -
否则,根据相应公式计算A中各个特征对D的(信息增益、信息增益比、基尼指数等),选择最合适的特征 . -
如果 的得分小于 ,则置T为单结点树,并将 作为该结点的类,返回T. -
否则,根据 特征取值,对数据D进行划分,继续递归构造决策树, 返回T.
核心公式
信息熵:
则随机变量X的熵定义为: 熵越大,随机变量的不确定性就越大,当 时,随机变量的熵最大等于logn,故 . 常见的决策树由三种: ID3、C4.5、CART.其中, , , .
| model | feature select | 树的类型 |
|---|---|---|
| ID3 | {分类:信息增益} | 多叉树 |
| C4.5 | {分类:信息增益比} | 多叉树 |
| CART | {分类:基尼指数} | 二叉树 |
| CART | {回归:平方误差} | 二叉树 |
算法十问
1、决策树和条件概率分布的关系?
决策树可以表示成给定条件下类的条件概率分布. 决策树中的每一条路径都对应是划分的一个条件概率分布. 每一个叶子节点都是通过多个条件之后的划分空间,在叶子节点中计算每个类的条件概率,必然会倾向于某一个类,即这个类的概率最大.
2、ID3和C4.5算法可以处理实数特征吗?如果可以应该怎么处理?如果不可以请给出理由?
ID3和C4.5使用划分节点的方法分别是信息增益和信息增益比,从这个公式中我们可以看到 这是处理类别特征的方法,实数特征能够计算信息增益吗?我们可以定义X是实数特征的信息增益是,.其中,则. 对于每一个实数可以使用这种方式进行分割. 除此之外,我们还可以使用特征的分桶,将实数特征映射到有限个桶中,可以直接使用ID3和C4.5算法.
3、既然信息增益可以计算,为什么C4.5还使用信息增益比?
在使用信息增益的时候,如果某个特征有很多取值,使用这个取值多的特征会的大的信息增益,这个问题是出现很多分支,将数据划分更细,模型复杂度高,出现过拟合的机率更大。使用信息增益比就是为了解决偏向于选择取值较多的特征的问题. 使用信息增益比对取值多的特征加上的惩罚,对这个问题进行了校正.
4、基尼指数可以表示数据不确定性,信息熵也可以表示数据的不确定性. 为什么CART使用基尼指数?
信息熵0, logK都是值越大,数据的不确定性越大. 信息熵需要计算对数,计算量大;信息熵是可以处理多个类别,基尼指数就是针对两个类计算的,由于CART树是一个二叉树,每次都是选择yes or no进行划分,从这个角度也是应该选择简单的基尼指数进行计算.
5、决策树怎么剪枝?
一般算法在构造决策树的都是尽可能的细分,直到数据不可划分才会到达叶子节点,停止划分. 因为给训练数据巨大的信任,这种形式形式很容易造成过拟合,为了防止过拟合需要进行决策树剪枝. 一般分为预剪枝和后剪枝,预剪枝是在决策树的构建过程中加入限制,比如控制叶子节点最少的样本个数,提前停止. 后剪枝是在决策树构建完成之后,根据加上正则项的结构风险最小化自下向上进行的剪枝操作. 剪枝的目的就是防止过拟合,是模型在测试数据上变现良好,更加鲁棒.
6、ID3算法,为什么不选择具有最高预测精度的属性特征,而不是使用信息增益?
7、为什么使用贪心和其发生搜索建立决策树,为什么不直接使用暴力搜索建立最优的决策树?
决策树目的是构建一个与训练数据拟合很好,并且复杂度小的决策树. 因为从所有可能的决策树中直接选择最优的决策树是NP完全问题,在使用中一般使用启发式方法学习相对最优的决策树.
8、如果特征很多,决策树中最后没有用到的特征一定是无用吗?
不是无用的,从两个角度考虑,一是特征替代性,如果可以已经使用的特征A和特征B可以提点特征C,特征C可能就没有被使用,但是如果把特征C单独拿出来进行训练,依然有效. 其二,决策树的每一条路径就是计算条件概率的条件,前面的条件如果包含了后面的条件,只是这个条件在这棵树中是无用的,如果把这个条件拿出来也是可以帮助分析数据.
9、决策树的优点?
优点: 决策树模型可读性好,具有描述性,有助于人工分析;效率高,决策树只需要一次性构建,反复使用,每一次预测的最大计算次数不超过决策树的深度。缺点: 对中间值的缺失敏感;可能产生过度匹配的问题,即过拟合。
10、基尼系数存在的问题?
基尼指数偏向于多值属性;当类数较大时,基尼指数求解比较困难;基尼指数倾向于支持在两个分区中生成大小相同的测试。
面试真题
-
决策树如何防止过拟合? -
信息增益比相对信息增益有什么好处? -
如果由异常值或者数据分布不均匀,会对决策树有什么影响? -
手动构建CART的回归树的前两个节点,给出公式每一步的公式推到? -
决策树和其他模型相比有什么优点? -
决策树的目标函数是什么?
高效对接AI领域项目合作、咨询服务、实习、求职、招聘等需求,背靠25W公众号粉丝,期待和你建立连接,找人找技术不再难!
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、检测分割识别、三维视觉、医学影像、GAN、自动驾驶、计算摄影、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿也欢迎联系:simiter@126.com

长按关注计算机视觉life
推荐阅读
最新AI干货,我在看