小猴机器人:无人驾驶产品之路 | 厚势

厚势按:无人驾驶技术当前非常火爆,但是一直没能见到短期能落地的产品,随着人工智能投资趋于理性,热潮逐渐退去,什么样的产品之路才能够有机会变成现实,是一个非常值得探讨的问题。本文从无人驾驶产品分类谈起,剖析不同分类的优缺点,最后给出主线团队选择专用车作为落地产品的思考。
分享嘉宾:张天雷,网名小猴机器人,在无人驾驶业界颇有名气,江湖人称“猴哥”。
在清华,他曾是智能车车队队长、国家智能车挑战赛裁判。在业界,他是智能驾驶专委会副秘书长、数家权威机构专家顾问,曾发表论文专利六十余篇。2013年,他向时任IDL实验室主任的余凯提议建立百度无人车团队,后一直作为初创核心从事决策规划和控制仿真研发工作,后离职创办专注于无人驾驶专用车产品的主线科技,出任CEO。
张天雷:大家好!很高兴跟大家一块儿交流一下我们在无人驾驶,今天不谈无人驾驶技术,是谈无人驾驶产品这块的思路。我是主线科技的张天雷,相信有很多熟人在这里。
现在很多谈无人驾驶的都是在谈技术本身,比如深度学习、识别跟踪,还有算法,还有(LOF KT?)排行等等这些东西。因为现在无人驾驶技术其实它还是比较火的,它处于阳春白雪的状态,听起来也是非常高端,现在各种各样的 DEMO 的效果也做的非常的酷炫。但是正如光有经典物理也做不出来蒸汽机,也发动不了蒸汽机的革命,光有半导体最后也做不出来计算机,也没有办法推广到我们现在人手一个笔记本电脑,光有 PCOIP,你更不可能做出来微信。所以说光有这个技术本身,其实最后也不一定能够做出产品,尤其是最后也不一定能卖得出去,然后更不要谈能盈利。还有就是技术,其实本身没有绝对的壁垒,而只有做出来一个比较好的产品,最后才能相当于有一个付诸实践的机会。
所以说其实现在大家都在谈技术,我倒是觉得应该是有这么一种思潮,来关注无人驾驶的产品本身。因为最终要去交考卷,别人要来评判你,其实说白了最后还是要靠市场给出来的。我们简单在百度搜索一下无人驾驶技术,现在有将近 300 万的访问结果,无人驾驶产品或者无人驾驶产品设计等等只有不到 8 万的访问结果,所以这种数 10 倍的差距,其实还是有天差地别的。看到这样的结果我们并不意外,因为无人驾驶这个东西本身确实是一个新兴的行业,而一般来讲新兴的行业就意味着有新的机会,所以今天我们着重谈一下无人驾驶的产品这一块。
先说明一下,在过去长达 10 年的时间里面,其实我就是一个无人驾驶行业的码农,然后我平时每天工作就是调调底层、调调决策规划,然后上路去做一些测试。但是突然有一天在熬夜调车的时候我就问我自己,这么多的 dirty work,然后做了 10 多个 DEMO,然后也有的 DEMO 还比较有名,做到什么时候才是一个头?就带着这样一个比较朴素的想法我就开始翻书,以前天天看论文、看代码,现在想要换一个思路,从别人的角度去看看。最后我就说来看看产品,这样一看我就觉得不得了,我有可能发现了我个人未来一个五年规划。这个五年规划其实就是产品经理,更确切讲就是一个无人驾驶的产品经理,我觉得对我来讲是非常合适的。因为我发现最终如果真的能够让自己的工作能够真正用起来,其实最后还是要通过产品这个渠道,而这个产品的战略实际上通过我的阅读,我发现实际上是非常重要的,而它现在这个方法论也是非常的完善。
看书的过程是一个疯狂吸收的过程,我尤其是我之前没有接触过,我发现以前的开发策略,主要是重视技术本身,然后要挑战技术极限的想法,可能确实有点偏颇。就是因为我们应该站在产品的角度来看技术到底应该怎么样去配合。
产品战略

所以后来我觉得我就变成了一个我之前特别不想见的人,就是一个 PM,但是我觉得我可能是 PM 里面比较懂技术的一个吧。所以通过我的阅读我也想跟大家一块儿分享一下,一个公司的产品战略实际上是企业对它所生产和经营的产品进行的一个全局性的谋划,它跟这个企业的市场战略其实是密切相关的,也是你经营战略一个非常重要的基础。企业它要依靠适销对路的、技术领先的和物美价廉的产品去赢得顾客,来占领和开拓市场,最后取得经济利益。产品战略定得好,企业就很可能会赢,产品战略如果定得不合适,可能真的就败了,而且最后是一个生死存亡的问题。
然后后面才是说我现在确定做某一个细分领域的某一个产品,我再去制定业务的战略和计划,然后最后再去跟整车厂谈,最后这个产品到底应该是怎么样从技术上去落实,然后逐步落实的过程当中你还要对它进行优化,然后最后再去管理业务计划,然后最后再去对它进行评估。
于是我就开始了自己的无人驾驶的产品之路,首先就是 follow 刚才我说的产品分析的这个步骤,我就看了一看,具体到无人驾驶产品这个市场,它的现状是什么样的呢?
无人驾驶现状
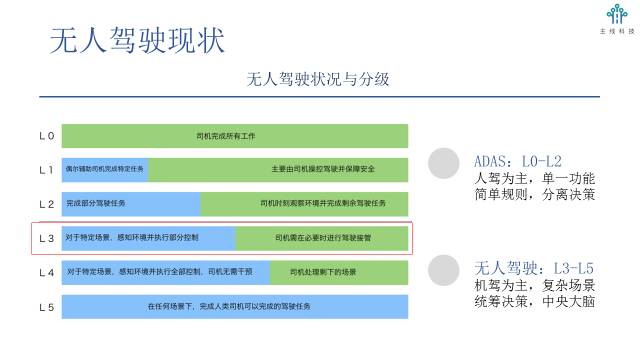
产品现状当中我首先对无人驾驶的状况和分级,就是 SAE 的分级然后做了一些调研,首先我就发现,从 0 级到 5 级,0 级就是 warning system,司机完成所有的事,然后 5 级就是全无人驾驶,在中间实际上这几层都是我们可以去研究是否我们能够把产品落地放在这儿的。当然我可能表达的非常主观,就是在 1 级和 2 级的产品化已经非常完善了,为什么呢?因为这个东西实际上是离主机厂和供应商提升以往的这种车辆智能化是非常近的一个东西,它们自然而然的通过这些需要它就会对这个产品去进行优化。主机厂和供应商在过去十几年的前沿研究,已经把一级和一点几或者二级的这样一些产品已经做到了一个规模化的优势,已经让这个市场被划分非常清楚了,尤其是我们在跟主机厂聊到一级和二级产品的时候,其实很多的初创产品他们是愿意选择说你拿来给我试试但是你真的想要做到他的车上去,做到量产,这个时候往往大部分的主机厂还是会选择比较大的供应商来去完成这样的工作,所以说其实你跟他不断的对接和尝试的过程,能够得到这个反馈和最后产品落地的希望可能没有那么强。而现在据我们看,主要的机会在哪儿?就是在我画的红框框这个地方,为什么呢?因为当时 SAE 对五级进行划分的时候,其实二级和三级之间有一个当时号称不太可以逾越的一个鸿沟,为什么呢?就是因为二级是叫做人驾为主,单一功能,简单规则,分离决策。等到三级以上就是机驾为主复杂场景,统筹决策需要中央大脑,实际二级和三级以上一个主要区别就是最后要负责任的这个主体发生了变化。原来二级以下的时候都是驾驶员负责,这是为什么特斯拉撞了卡车的那件事,最后特斯拉也把责任给免掉,就是因为他说我是一个二级自动驾驶,你人需要时刻地对它进行监管。而现在比如奥迪最近推出来的 A8 号称是三级,那么现在出了问题就一定系统要及时对现在出现的问题进行判断。所以说现在就是到三级和三级以上,因为涉及到人类驾驶员要撒手不管这个问题,所以现在变得迟迟没有很好的一个进展,也变成现在当前大家希望能够落地的一个热门。而四级的自动驾驶实际上就是一个三级的升级,当然有人也说因为三级定义太模糊,所以我直接要做四级,其实这些东西就是场景覆盖的不同,也有很多企业在做这方面的管理,但是不管三级和四级其实它都需要一个统筹决策的中央大脑来做。
无人驾驶产品现状
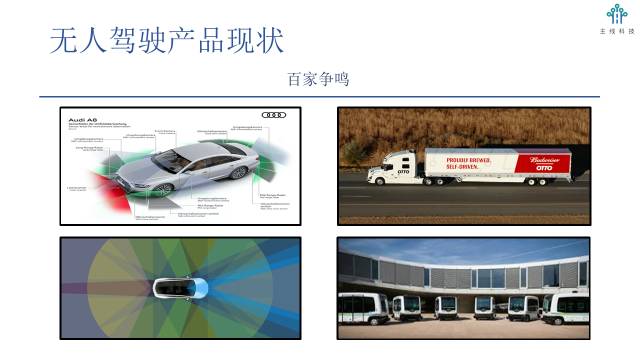
当分清楚了现在的市场现状和分级之后,就调查一下现在市场上已经推出的这些产品,因为其实现在能够推出产品的这些企业实际上说白了都是有非常多的精英在这个上面也是做了非常多的工作,你通过研究他们产品的发展思路和产品现在的情况,你能够大概对自己的产品想做成什么样,是有一个比较好的参考价值,所以我就选了几个比较有名的,比如最近刚出来的奥迪的 A8,号称自己已经做到了三级自动驾驶,说白了就是在某一个特定场景下人可以不用完全对车辆运行进行控制。它实际上就是匹配了Trafficjam assistant,就是「交通拥堵助手」,在交通拥堵低速的情况下它可以做 L3。它解决的这个问题,因为我们是分析产品,所以我们就看它大家能解决什么问题,什么痛点,它解决的就是人类驾驶员所痛恨的低级重复的问题。左下角的就是特斯拉 2.0,它现在可以在环路,当然也有人冒险说是在城市道路上面去试 L2 PLUS 这样一些功能,它解决的是一个人类驾驶员长期遇到的长途疲惫的问题。再看右上角这个 OTTO 最近风波不断,但是它的产品立意也是有一定根据的。它这个根据就是说在欧美国家现在用人荒、用人成本高,资本主义国家,大家人都是安居乐业,所以他们现在提出说我用自动驾驶技术来给你做机器换人,从一个公路港到另外一个公路港我可以用无人车帮你做无人运输,这样企业可以把工人的人力省下来,所以它解决的是人力资源问题。而右下角这个也是全世界有好几十个地点已经开始测试 shuttle bus,这种小公交车是做低速载人,我看到很多的场景都是在偏远的地方,解决的也是人力的问题。
从上面我们大家这些耳熟能详的产品来分析,我们能够看到一个普遍的规律是什么呢?就是说它这个比较受欢迎的场景设计,实际上都是在非常非常细化的一个特定的场景,用现在比较接近成熟的技术然后来做一些能够直接落地并且能够让消费者或者说 to b 的时候能够让企业用起来,解决它痛点的一些产品。当然高速港到高速港之间的 OTTO 它到底在开放情况下做的效果怎么样,还有 EVMile 它在城区到城区之间,有一些行人还有自行车的情况下到底表现的怎么样,其实这个我们是值得商榷的。
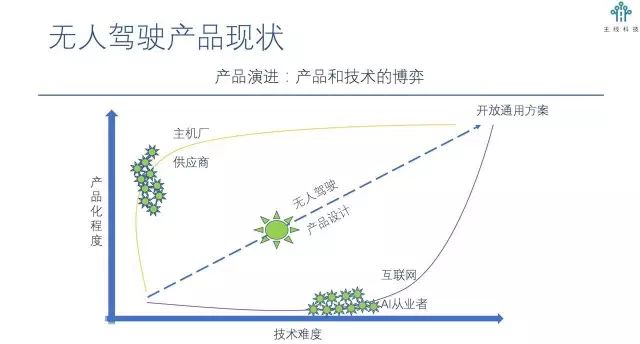
我自己琢磨做产品跟写代码不一样,写代码就是写,做产品就需要琢磨。我研究了一下,现在的产品演进路径大概是两条,一个是主机厂供应商拿到现在已经比较好的成熟技术他们做产品,因为他们要求可靠性非常高,安全性也非常高,他现在说我就是做逐步的演进策略。而互联网和AI的专家他们实际上想的就是,我就要万军丛中直取上将首级,我就直接把技术难度做到最高,回头我的难度一旦攻克我就能够有非常大的一个收获。
实际上从我看来也像我在图上所表达的这样的意思来讲,当然我可能没有完全表达到位,这两种做法都存在一些问题,我为什么把这两个东西画成曲线,我认为曲率是代表一些坎的。一味的我就一定要追求产品落地,追求量产,追求迅速把它铺出去,但是其实可能你一直在整体的这种产品战略的设计和你的技术方面就不会有太多的积累。你一味的如果说是追求技术就是高举高打高端,一直就是没有产品的落地,比如说现在 google Waymo 一直也是相当于做了将近十年的时间,然后还是在做一些测试等等,其实可能还存在就是一直没有产品反馈,然后没有新鲜血液输入的问题。
所以我就问自己,同样我也问各位,有没有这样一个途径,既能够满足一定的产品化又能够满足技术上有一定的进步空间呢?而且把这个产品和技术的博弈弄好,它不但是解决了我们能够逐步的把产品和技术都有演进的这样一个需求,而且我觉得最主要是它把RD和PM的关系能够搞得比较好。
无人驾驶产品分析

带着这么一个问题,我就从头开始看,因为搞程序也搞了好多年,我就想因为无人驾驶这个东西,无论是做技术也好还是做产品也好,它的源头其实真的就是你去对无人驾驶的刚需进行分析,它的刚需到底是什么,所以我自己也是非常主观的一个总结,你们也不要轻易相信,自己每个人都要有分辨能力。我觉得主要是分两个事儿,要么就是这个事儿能省钱,要么就是这个产品它能省事儿,我现在贴上这个片子实际上是DHL对无人驾驶技术未来的一个分析。
他们在对这件事情进行分析的时候,他说无人驾驶之所以能出现,就是解决了人类讨厌做低级重复,讨厌做长途疲惫的等等这样一些事情,从经济性、高效性和安全性三个方面能够给我们带来一定好处的,这个才是真正的机器换人的刚需所在。这个经济性就是说我可以延长设备的工作时间,比如白天的时候人做,晚上的时候机器做,这个事儿肯定是省钱。高效性实际上说白了就是我要么开车开得好,我要么产出的质量更高,我要么哪怕甚至说你在堵车的时候然后我让用户能玩一会儿手机,这个都是一些效率提高的体现。
还有一个更重要的,实际上刚才我说「省事」里面还包括救命,现在由于70%以上的事故都是由驾驶员粗心玩手机造成的,所以无人驾驶技术提高它的安全性,比如说像现在AEV的这种产品,很多客车上都已经强制要求安装,它提高安全性,降低事故率,这也实际上是一个刚需。
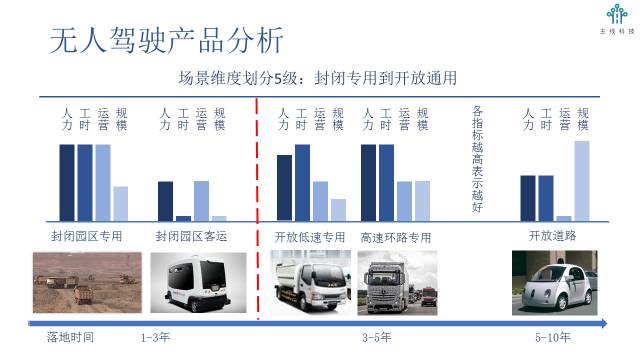
说了这么多总要对无人驾驶的产品做出一些自己的说法,不管对不对。所以我们也是经过了一些讨论,最后就发现无人驾驶的产品演进有可能可以通过对场景维度的划分,比如假设我们也对它划分成是五级,在比较简单的、好的场景的情况下,用一些比较成熟的技术率先落地,然后在系统不断运营的过程当中再逐步的走向开放,走向高速,然后最后达到这种通用的无人驾驶的过程。
简单来讲我们从几个维度进行了一些分析,像我这个横轴就是技术所能成熟的时间,就是以我们一个从业者的估计。我们觉得现在在封闭专用的情况下,可能它这个技术大部分已经成熟了,通过我们采回来的场景数据我们发现可能是这样的。在开放通用的情况下做了这么多年的DEMO有太多的qualities实际上是我们短时间之内解决不掉的,所以如果你想做技术去秀一些肌肉,那么当然你可以把这些qualities用一些模型来解决。但是如果你真的是想要做产品,你要去养家糊口的话,这些qualities你可能真的是要把它给去掉,用一些改进的方法,比如说对场景进行限制,先把你的产品赶紧做出来。另外对这个产品分析的时候,我们其实还划分了一些维度,送大家一个维度图,我们从它到底能节省多少人力,到底能节省出多少工时,到底运营的难度怎么样,到底现在它的市场规模怎么样等等几个维度,我们相当于对它进行了一些划分。最后我们发现在封闭园区的专用车,节省了人力也不错,工时也能节省出来很多,它这个规模也还可以,对于一个公司去做这个事儿其实还是不错的。相反来讲比如开放道路的通用无人驾驶,哪怕是现在这种无人出租的模式其实它的人力和工时也没有节约出来特别多。现在主要就是卡在它的运营难度非常大,在什么样的场景下能够运行现在大部分的人也没有能够说清楚。
所以我们现在就是觉得如果按照这样一个从封闭专用到开放通用的思路,可能不断的有产品落地,技术也能够得到演进,是一个比较平缓的,后面波澜不惊的能够走向开放道路的一条比较稳妥的产品之路。中间我划了一条红线,非常值得说明一下,这个红线隔的是什么呢?隔的就是封闭到开放,然后同样它的潜在意思隔的是什么呢?隔的是确定性和不确定性,如果我们现在讲人工智能难在哪儿?人工智能其实主要就难在去应付不确定性的能力,以往我们做专家系统我就用规则机堆出来这个,它也叫人工智能,它能解决的东西有限。现在在开放场景下要解决这个问题,就需要复杂的AI决策模型。
案例

接下来就是举一个例子,按照我们之前产品之路的方法论,就是对比如说智能公路施工这个方法去分析了一下,而且我们专门跑到工地去跟工人坐在一块吃个饭聊一聊,施工流程的分析,就是施工的步骤非常繁多,劳动的密集而且非常的低效。我们是专门查了一些施工的书,我们发现在修一条路的过程当中实际上它分为路基、路面和桥梁,而路面工程里面相当一大部分是作业施工,整个施工过程其实它是非常枯燥乏味,而且可以用机器来取代的。

就是采用我们之前说的几个维度进行分析,机械化公路施工现在是什么痛点呢?首先从经济性来讲它的高温、高燥、高粉尘还倒班,然后作业条件非常艰苦。然后招工的成本很高,工人也很难管理,经常会有一些人为的事物发生,它这个施工对工艺要求比较复杂的,包括施工的力度,你的轨迹这些指标,人就是通常需要返工。从安全性来讲,实际上在施工工地将经常有人由于疏忽导致一些安全问题。
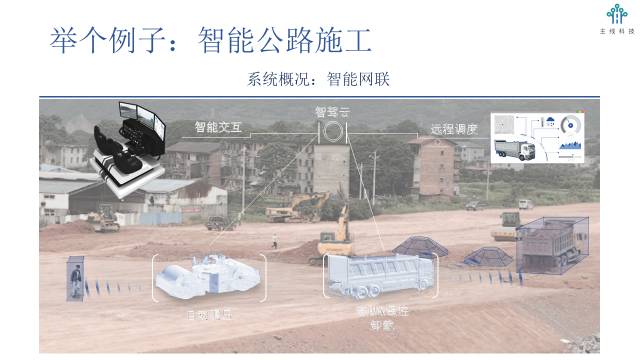
所以后面我们就响应咱们国家对智能网联的号召,我们就说把施工的事儿我们给它做一些修改,比如我们在远端做一个智驾云,一个是可以对它进行交互,然后可以远程对这些尽量进行交互,知道它现在运行的情况,而且在近处的时候我实际上就可以机器换人,我把它压路、渣土等等这些东西我都给它换掉。更有把握的是什么呢?就是我刚才在我们的路线图当中我说一个非常有优势的地方,就是说我可以把整个全场的人全部都清掉,能够保证我系统能够稳定运行。
总结
最后简单做一个总结,主线科技在我的忽悠下,大家都觉得无人驾驶专用车,解放发展生产力,没准可能是一条可行的无人驾驶产品之路。

文章来源:汽车创新港
责任编辑:Sasa
厚势往期推送精选


-END-
文章精选
企业家
智能驾驶
苹果公司造车?库克又不傻!iPhone的挣钱效率比造车高多了!
苹果公司造车?库克又不傻!iPhone的挣钱效率比造车高多了!
Waymo要Intel Inside,莫非自动驾驶真要「苹果化」?
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看「无需基础知识,理解自动驾驶高精度行车定位技术」





